Analysis and Design of a Maglev Permanent Magnet Synchronous Linear Motor to Reduce Additional Torque in Dq Current Control
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

By James Powell and Gordon Danby
by James Powell and Gordon Danby aglev is a completely new mode of physically contact the guideway, do not need The inventors of transport that will join the ship, the engines, and do not burn fuel. Instead, they are the world's first wheel, and the airplane as a mainstay magnetically propelled by electric power fed superconducting Min moving people and goods throughout the to coils located on the guideway. world. Maglev has unique advantages over Why is Maglev important? There are four maglev system tell these earlier modes of transport and will radi- basic reasons. how magnetic cally transform society and the world economy First, Maglev is a much better way to move levitation can in the 21st Century. Compared to ships and people and freight than by existing modes. It is wheeled vehicles—autos, trucks, and trains- cheaper, faster, not congested, and has a much revolutionize world it moves passengers and freight at much high- longer service life. A Maglev guideway can transportation, and er speed and lower cost, using less energy. transport tens of thousands of passengers per even carry payloads Compared to airplanes, which travel at similar day along with thousands of piggyback trucks into space. speeds, Maglev moves passengers and freight and automobiles. Maglev operating costs will at much lower cost, and in much greater vol- be only 3 cents per passenger mile and 7 cents ume. In addition to its enormous impact on per ton mile, compared to 15 cents per pas- transport, Maglev will allow millions of human senger mile for airplanes, and 30 cents per ton beings to travel into space, and can move vast mile for intercity trucks. -
A BRIEF INTRODUCTION to TUBULAR LINEAR MOTORS Linear Motors Provide Direct Thrust for Positioning a Payload, Eliminating the Need for Rotary-To-Linear Conversion
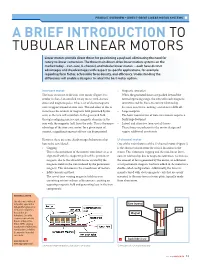
PRODUCT OVERVIEW – DIRECT-DRIVE LINEAR MOTOR SYSTEMS A BRIEF INTRODUCTION TO TUBULAR LINEAR MOTORS Linear motors provide direct thrust for positioning a payload, eliminating the need for rotary-to-linear conversion. The three main direct-drive linear motion systems on the market today – iron-core, U-channel, and tubular linear motors – each have distinct advantages and disadvantages with respect to specific applications, for example regarding form factor, achievable force density, and efficiency. Understanding the differences will enable a designer to select the best motor option. Iron-core motor • Magnetic saturation The basic structure of the iron-core motor (Figure 1) is When the generated forces are pushed beyond the similar to that of an unrolled rotary motor with discrete normal operating range, the iron will reach magnetic stator and magnetic poles. It has a set of electromagnetic saturation and the force-to-current relationship coils wrapped around an iron core. The end effect of this is becomes non-linear, making control more difficult. to increase the amount of magnetic field generated by the • Large footprint coils, as the iron will contribute to the generated field The basic construction of iron-core motors requires a through realigning microscopic magnetic domains in the fairly large footprint. iron with the magnetic field from the coils. This is the major • Lateral and attractive (non-useful) forces advantage of the iron-core motor: for a given input of These forces are inherent to the motor design and current, a significant amount of force can be generated. require additional constraints. However, there are some disadvantages/behaviours that U-channel motor have to be considered: One of the main features of the U-channel motor (Figure 2) • Cogging is the absence of iron from the critical locations in the This is the movement of the motor’s iron forcer so as to motor. -

High Speed Linear Induction Motor Efficiency Optimization
Calhoun: The NPS Institutional Archive Theses and Dissertations Thesis Collection 2005-06 High speed linear induction motor efficiency optimization Johnson, Andrew P. (Andrew Peter) http://hdl.handle.net/10945/11052 High Speed Linear Induction Motor Efficiency Optimization by Andrew P. Johnson B.S. Electrical Engineering SUNY Buffalo, 1994 Submitted to the Department of Ocean Engineering and the Department of Electrical Engineering and Computer Science in Partial Fulfillment of the Requirements for the Degree of Naval Engineer and Master of Science in Electrical Engineering and Computer Science at the Massachusetts Institute of Technology June 2005 ©Andrew P. Johnson, all rights reserved. MIT hereby grants the U.S. Government permission to reproduce and to distribute publicly paper and electronic copies of this thesis document in whole or in part. Signature of A uthor ................ ............................... D.epartment of Ocean Engineering May 7, 2005 Certified by. ..... ........James .... ... ....... ... L. Kirtley, Jr. Professor of Electrical Engineering // Thesis Supervisor Certified by......................•........... ...... ........................S•:• Timothy J. McCoy ssoci t Professor of Naval Construction and Engineering Thesis Reader Accepted by ................................................. Michael S. Triantafyllou /,--...- Chai -ommittee on Graduate Students - Depa fnO' cean Engineering Accepted by . .......... .... .....-............ .............. Arthur C. Smith Chairman, Committee on Graduate Students DISTRIBUTION -

Industrial Linear Motors
Industrial Linear Motors Smart solutions are driven by PRODUCT OVERVIEW www.linmot.com Precision and dynamics In the products and in the everyday life of NTI AG, these values are inseparable. NTI AG NTI AG is a global manufacturer of high quality tubular style linear motors and linear motor systems and thus focuses on the development, production and distribution of linear direct drives for use in industrial environments. Founded in 1993 as an independent business unit of the Sulzer Group, NTI AG has been in operation since 2000 as an independent company. NTI AG headquarters are located in Spreitenbach, near Zurich in Switzerland. In addition to three production sites in Switzerland and Slovakia, NTI AG maintains a sales and support office LinMot® USA Inc. to cover the Americas. Mission The brands LinMot® for industrial linear motors and MagSpring® for magnetic springs are offered LinMot offers its customers a sophisticated and dedicated linear to customers worldwide. NTI AG drive system that can be easily integrated into all leading control maintains an experienced customer systems. A high degree of standardization, delivery from stock and consultant sales and support a worldwide distribution network insure the immediate availability network of over 80 locations and excellent customer support. worldwide. For the realization of linear motion Our aim is to push linear direct drive technology and make it a NTI AG is always a competent and standard machine design element. We offer highly efficient drive reliable partner. solutions that make a major contribution to the overall resource conservation effort. 2 3 Linear Motors Position and Temperature sensors Electronic nameplate Stator Winding Slider with Neodynium Magnets Payload Mounting LinMot linear motors employ a direct electromagnetic principle. -

Methods for Improving Efficiency of Linear Induction Motor for Urban
512 Methods for Improving Efficiency of Linear Induction Motor for Urban Transit∗ Nobuo FUJII∗∗, Toshiyuki HOSHI∗∗ and Yuichi TANABE∗∗ To improve the efficiency of the linear induction motors (LIMs) for transportation, the compensation of end effect for LIM with the restriction of length and the long LIM with small end effect essentially are discussed respectively. Based on the proposed concept, the com- pensation method of the magnet rotator type and AC coil type of compensators are developed respectively. The utility is not yet confirmed. As for the long LIM with length of 10 m, the analysis shows that the efficiencies are about 85% at 40 km/h and above 90% at 360 km/h respectively. Key Words: Linear Motor, Linear Induction Motor, LIM, Linear Drives, Transportation, Traction, Subway, Electromagnetic Analysis, End Effect, Compensator length of LIM, the compensation of end effect is the only 1. Introduction method for remarkable improve of the characteristics. The In a part of new type transit, linear induction motors compensating winding method was proposed previous- (1) ff (LIMs) have been used as a direct electromagnetic drive ly , but it was not e ective. The authors have proposed ff (2) device without adhesion. In Japan, the LIM-driven train the new type of end e ect compensator . The proposed ff has been used in the subway in some large cities, as the method is based on the new concept that the end e ect can LIM reduces the construction cost of tunnel because the be compensated only by supplying the eddy current syn- thin shape makes the sectional area of tunnel small and the chronizing with the LIM frequency in front of LIM, which large gradability enables the minimum length of the route. -
Development and Testing of an Axial Halbach Magnetic Bearing
NASA/TM—2006-214357 Development and Testing of an Axial Halbach Magnetic Bearing Dennis J. Eichenberg, Christopher A. Gallo, and William K. Thompson Glenn Research Center, Cleveland, Ohio July 2006 NASA STI Program . in Profile Since its founding, NASA has been dedicated to the • CONFERENCE PUBLICATION. Collected advancement of aeronautics and space science. The papers from scientific and technical NASA Scientific and Technical Information (STI) conferences, symposia, seminars, or other program plays a key part in helping NASA maintain meetings sponsored or cosponsored by NASA. this important role. • SPECIAL PUBLICATION. Scientific, The NASA STI Program operates under the auspices technical, or historical information from of the Agency Chief Information Officer. It collects, NASA programs, projects, and missions, often organizes, provides for archiving, and disseminates concerned with subjects having substantial NASA’s STI. The NASA STI program provides access public interest. to the NASA Aeronautics and Space Database and its public interface, the NASA Technical Reports Server, • TECHNICAL TRANSLATION. English- thus providing one of the largest collections of language translations of foreign scientific and aeronautical and space science STI in the world. technical material pertinent to NASA’s mission. Results are published in both non-NASA channels and by NASA in the NASA STI Report Series, which Specialized services also include creating custom includes the following report types: thesauri, building customized databases, organizing and publishing research results. • TECHNICAL PUBLICATION. Reports of completed research or a major significant phase For more information about the NASA STI of research that present the results of NASA program, see the following: programs and include extensive data or theoretical analysis. -

Understanding Permanent Magnet Motor Operation and Optimized Filter Solutions
Understanding Permanent Magnet Motor Operation and Optimized Filter Solutions June 15, 2016 Todd Shudarek, Principal Engineer MTE Corporation N83 W13330 Leon Road Menomonee Falls WI 53154 www.mtecorp.com Abstract Recent trends indicate the use of permanent magnet (PM) motors because of its energy savings over induction motors. PM motors offer energy savings, higher power densities, and improved control. The upfront cost of a PM motor may be higher than an induction motor, but the total cost of ownership may be lower. However, a PM motor system brings design challenges in terms of selecting the best variable frequency drive (VFD) as well as a filter to protect the motor. A PM motor requires the use of a VFD to start and operate. The best VFDs will need to operate at higher switching frequencies to meet the higher fundamental frequencies of the PM motors. In turn, the PM motor will need to be protected from power distortion, harmonics, and overheating. While a traditional filter is de-rated to meet the higher frequencies, this paper will demonstrate that, by nature of the operation of a PM motor, an appropriately design filter that operates for higher switching and fundamental frequencies will reduce the size, weight, and cost of the system. Introduction special considerations when specifying a filter for a PM motor system, specifically the use of Historically induction motors have been used in higher switching frequencies and filters. a variety of industrial applications. Recent trends indicate a shift toward permanent magnet (PM) motors which offer up to 20% energy savings, Induction Motor Operation higher power densities, and improved control. -

Axial Field Permanent Magnet Machines with High Overload Capability for Transient Actuation Applications
THE UNIVERSITY OF SHEFFIELD Axial field permanent magnet machines with high overload capability for transient actuation applications By Jiangnan Gong A Thesis submitted for the degree of Doctor of Philosophy Department of Electronic and Electrical Engineering The University of Sheffield. JANUARY 2018 ABSTRACT This thesis describes the design, construction and testing of an axial field permanent magnet machine for an aero-engine variable guide vane actuation system. The electrical machine is used in combination with a leadscrew unit that results in a minimum torque specification of 50Nm up to a maximum speed of 500rpm. The combination of the geometry of the space envelope available and the modest maximum speed lends itself to the consideration of an axial field permanent magnet machines. The relative merits of three topologies of double-sided permanent magnet axial field machines are discussed, viz. a slotless toroidal wound machine, a slotted toroidal machine and a yokeless axial field machine with separate tooth modules. Representative designs are established and analysed with three-dimensional finite element method, each of these 3 topologies are established on the basis of a transient winding current density of 30A/mm2. Having established three designs and compared their performance at the rated 50Nm point, further overload capability is compared in which the merits of the slotless machine is illustrated. Specifically, this type of axial field machine retains a linear torque versus current characteristic up to higher torques than the other two topologies, which are increasingly affected by magnetic saturation. Having selected a slotless machine as the preferred design, further design optimization was performed, including detailed assessment of transient performance. -

Flywheel Energy Storage System with Superconducting Magnetic Bearing
Flywheel Energy Storage System with Superconducting Magnetic Bearing Makoto Hirose * , Akio Yoshida , Hidetoshi Nasu , Tatsumi Maeda Shikoku Research Institute Incorporated , Takamatsu , Kagawa , Japan In an effort to level electricity demand between day and night, we have carried out research activities on a high-temperature superconducting flywheel energy storage system (an SFES) that can regulate rotary energy stored in the flywheel in a noncontact, low-loss condition using superconductor assemblies for a magnetic bearing. These studies are being conducted under a Japanese national project (sponsored by the Agency of Industrial Science and Technology - a unit of the Ministry of International Trade and Industry - and the New Energy and Industrial Technology Development Organization). Phase 1 of the project was carried out on a five-year plan beginning in fiscal 1995 with the participation of 10 interested companies, including Shikoku Research Institute Inc. During the five-year period, we carried out two major studies - one on the operation of a small flywheel system (built as a small-scale model) and the other on superconducting magnetic bearings as an elemental technology for a 10-kWh energy storage system. Of the results achieved in Phase 1 of the project (from October 1995 through March 2000), this paper gives an outline of the small flywheel system (having an energy storage capacity of 0.5 kWh) and reports on progress in the development of magnetic bearings using superconductor assemblies (which we call "superconducting magnetic bearings" or "SMBs"). 1. Small-Scale Model 1.1. System Configuration The small-scale model was built in 1998 mainly for the purpose of demonstrating a control technology for high-speed operation of a rotor levitated in a noncontact condition by a superconducting magnetic bearing. -

Review of Magnetic Levitation (MAGLEV): a Technology to Propel Vehicles with Magnets by Monika Yadav, Nivritti Mehta, Aman Gupta, Akshay Chaudhary & D
Global Journal of Researches in Engineering Mechanical & Mechanics Volume 13 Issue 7 Version 1.0 Year 2013 Type: Double Blind Peer Reviewed International Research Journal Publisher: Global Journals Inc. (USA) Online ISSN: 2249-4596 & Print ISSN: 0975-5861 Review of Magnetic Levitation (MAGLEV): A Technology to Propel Vehicles with Magnets By Monika Yadav, Nivritti Mehta, Aman Gupta, Akshay Chaudhary & D. V. Mahindru SRMGPC, India Abstract - The term “Levitation” refers to a class of technologies that uses magnetic levitation to propel vehicles with magnets rather than with wheels, axles and bearings. Maglev (derived from magnetic levitation) uses magnetic levitation to propel vehicles. With maglev, a vehicle is levitated a short distance away from a “guide way” using magnets to create both lift and thrust. High-speed maglev trains promise dramatic improvements for human travel widespread adoption occurs. Maglev trains move more smoothly and somewhat more quietly than wheeled mass transit systems. Their nonreliance on friction means that acceleration and deceleration can surpass that of wheeled transports, and they are unaffected by weather. The power needed for levitation is typically not a large percentage of the overall energy consumption. Most of the power is used to overcome air resistance (drag). Although conventional wheeled transportation can go very fast, maglev allows routine use of higher top speeds than conventional rail, and this type holds the speed record for rail transportation. Vacuum tube train systems might hypothetically allow maglev trains to attain speeds in a different order of magnitude, but no such tracks have ever been built. Compared to conventional wheeled trains, differences in construction affect the economics of maglev trains. -
Design of 42V/3000W PERMANENT MAGNET SYNCHRONOUS GENERATOR ______
Electronics Mechanics Computers The Ohio State University Mechatronic Systems Program Design of 42V/3000W PERMANENT MAGNET SYNCHRONOUS GENERATOR _________________________________ By Guruprasad Mahalingam , M.S. Student Prof. Ali Keyhani Mechatronics System Laboratory DEPARTMENT OF ELECTRICAL ENGINEERING THE OHIO STATE UNIVERSITY [email protected] Phone: 614-292-4430 December, 2000 120 Acknowledgments I wish to thank my adviser, Professor Ali Keyhani, for his insight, support and guidance which made this work possible. This work was supported in part by the Delphi Automotive Systems, The National Science Foundation: Grant ESC 9722844, 9625662, Department of Electrical Engg., The Ohio State University. I also wish to thank Ford Motor Company, TRW, AEP which support the work at Mechatronics Systems Lab. I wish to acknowledge Mongkol Konghirun, Coy Brian Studer whose earlier work in the field was a ready reference to my work. My sincere thanks to Dr. Tomy Sebastian, Delphi Saginaw Steering Systems for his support, advice, and interest in my research; Mr. Philippe Wendling from Magsoft Corporation for his technical assistance. 121 CHAPTER 1 Machine Design - Introduction And Basics 1.1 Background Transforming the classical mechanical and hydraulic systems into electric systems to provide better performance and customer satisfaction is the current trend in the automotive industry Eg. electric power steering systems, electric brakes etc.. The penalty is the increase in demand for electrical power. It is estimated that the steady state power requirement in the typical luxury class vehicle would rise from the current level of 1500 W to about 3000 W and to about 7000 W for a hybrid electric vehicle by the year 2005 [16,17,2]. -

Introduction & Overview of Magnetic Levitation (MAGLEV) Train System
Volume 3, Issue 2, February – 2018 International Journal of Innovative Science and Research Technology ISSN No:-2456 –2165 Introduction & Overview of Magnetic Levitation (MAGLEV) Train System Mr. Abhijeet T. Tambe1 Prof. Dipak S. Patil2 Mechanical Department Mechanical Department Loknete Gopinathji Munde Institute of Engineering Loknete Gopinathji Munde Institute of Engineering Education & Research Education & Research Nashik, India Nashik, India Mr. Sanjay S. Avhad3 Mechanical Department Loknete Gopinathji Munde Institute of Engineering Education & Research Nashik, India Abstract - In this paper, we will discuss about Basics of I. INTRODUCTION magnetic levitation train system , its components and working. A German inventor named “Alfred Zehden” was Basically, the MAGLEV train stands for magnetic levitation awarded by United States Patent for a linear motor propelled train and is a system of high speed transportation as compared train. The inventor was awarded U.S. Patent 782,312 on 14 to conventional train system. February 1905 and U.S. Patent RE 12,700 on 21 August The term “MAGLEV” refers not only to the vehicles 1907. An Electromagnetic transportation system was but to the railway system as well specially design for magnetic discovered and developed in 1907 by F.S. Smith. In levitation and propulsion. The important concept of this system between 1937 & 1941 Herman Kemper was awarded by is to generate magnetic field obtained by using either serious of German patents for magnetic levitation train permanent magnets or electromagnets. As compared to propelled by linear motors. conventional train, maglev train system has no moving parts, the train travels along its guideway of magnets which controls Maglev is derived from magnetic levitation which means the train stability and speed therefore the maglev train are to lift a vehicle without any mechanical support with the quiter and smoother than conventional trains and have the help of magnetic field generated by either permanent potential for much higher speed.