Introduction to Numerical Analysis
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Numerical Solution of Ordinary Differential Equations
NUMERICAL SOLUTION OF ORDINARY DIFFERENTIAL EQUATIONS Kendall Atkinson, Weimin Han, David Stewart University of Iowa Iowa City, Iowa A JOHN WILEY & SONS, INC., PUBLICATION Copyright c 2009 by John Wiley & Sons, Inc. All rights reserved. Published by John Wiley & Sons, Inc., Hoboken, New Jersey. Published simultaneously in Canada. No part of this publication may be reproduced, stored in a retrieval system, or transmitted in any form or by any means, electronic, mechanical, photocopying, recording, scanning, or otherwise, except as permitted under Section 107 or 108 of the 1976 United States Copyright Act, without either the prior written permission of the Publisher, or authorization through payment of the appropriate per-copy fee to the Copyright Clearance Center, Inc., 222 Rosewood Drive, Danvers, MA 01923, (978) 750-8400, fax (978) 646-8600, or on the web at www.copyright.com. Requests to the Publisher for permission should be addressed to the Permissions Department, John Wiley & Sons, Inc., 111 River Street, Hoboken, NJ 07030, (201) 748-6011, fax (201) 748-6008. Limit of Liability/Disclaimer of Warranty: While the publisher and author have used their best efforts in preparing this book, they make no representations or warranties with respect to the accuracy or completeness of the contents of this book and specifically disclaim any implied warranties of merchantability or fitness for a particular purpose. No warranty may be created ore extended by sales representatives or written sales materials. The advice and strategies contained herin may not be suitable for your situation. You should consult with a professional where appropriate. Neither the publisher nor author shall be liable for any loss of profit or any other commercial damages, including but not limited to special, incidental, consequential, or other damages. -

Chapter 16: Differential Equations
✐ ✐ ✐ ✐ Chapter 16 Differential Equations A vast number of mathematical models in various areas of science and engineering involve differ- ential equations. This chapter provides a starting point for a journey into the branch of scientific computing that is concerned with the simulation of differential problems. We shall concentrate mostly on developing methods and concepts for solving initial value problems for ordinary differential equations: this is the simplest class (although, as you will see, it can be far from being simple), yet a very important one. It is the only class of differential problems for which, in our opinion, up-to-date numerical methods can be learned in an orderly and reasonably complete fashion within a first course text. Section 16.1 prepares the setting for the numerical treatment that follows in Sections 16.2–16.6 and beyond. It also contains a synopsis of what follows in this chapter. Numerical methods for solving boundary value problems for ordinary differential equations receive a quick review in Section 16.7. More fundamental difficulties arise here, so this section is marked as advanced. Most mathematical models that give rise to differential equations in practice involve partial differential equations, where there is more than one independent variable. The numerical treatment of partial differential equations is a vast and complex subject that relies directly on many of the methods introduced in various parts of this text. An orderly development belongs in a more advanced text, though, and our own description in Section 16.8 is downright anecdotal, relying in part on examples introduced earlier. 16.1 Initial value ordinary differential equations Consider the problem of finding a function y(t) that satisfies the ordinary differential equation (ODE) dy = f (t, y), a ≤ t ≤ b. -
Differential Equations
Differential Equations • Overview of differential equation • Initial value problem • Explicit numeric methods • Implicit numeric methods • Modular implementation Physics-based simulation • It’s an algorithm that produces a sequence of states over time under the laws of physics • What is a state? Physics-based simulation xi xi+1 xi xi+1 = xi +∆x ∆x Physics-based simulation xi Newtonian laws gravity wind gust xi+1 elastic force . integrator xi xi+1 = xi +∆x ∆x Differential equations • What is a differential equation? • It describes the relation between an unknown function and its derivatives • Ordinary differential equation (ODE) • is the relation that contains functions of only one independent variable and its derivatives Ordinary differential equations An ODE is an equality equation involving a function and its derivatives known function x˙(t)=f(x(t)) time derivative of the unknown function that unknown function evaluates the state given time What does it mean to “solve” an ODE? Symbolic solutions • Standard introductory differential equation courses focus on finding solutions analytically • Linear ODEs can be solved by integral transforms • Use DSolve[eqn,x,t] in Mathematica Differential equation: x˙(t)= kx(t) − kt Solution: x(t)=e− Numerical solutions • In this class, we will be concerned with numerical solutions • Derivative function f is regarded as a black box • Given a numerical value x and t, the black box will return the time derivative of x Physics-based simulation xi Newtonian laws gravity wind gust xi+1 elastic force . integrator -

Numerical Methods for Evolutionary Systems, Lecture 2 Stiff Equations
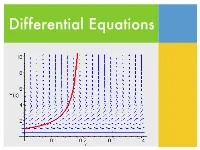
Numerical Methods for Evolutionary Systems, Lecture 2 C. W. Gear Celaya, Mexico, January 2007 Stiff Equations The history of stiff differential equations goes back 55 years to the very early days of machine computation. The first identification of stiff equations as a special class of problems seems to have been due to chemists [chemical engineers] in 1952 (C.F. Curtiss and J.O. Hirschfelder, Integration of stiff equations, Proc. of the National Academy of Sciences of U.S., 38 (1952), pp 235--243.) For 15 years stiff equations presented serious difficulties and were hard to solve, both in chemical problems (reaction kinetics) and increasingly in other areas (electrical engineering, mechanical engineering, etc) until around 1968 when a variety of methods began to appear in the literature. The nature of the problems that leads to stiffness is the existence of physical phenomena with very different speeds (time constants) so that, while we may be interested in relative slow aspects of the model, there are features of the model that could change very rapidly. Prior to the availability of electronic computers, one could seldom solve problems that were large enough for this to be a problem, but once electronic computers became available and people began to apply them to all sorts of problems, we very quickly ran into stiff problems. In fact, most large problems are stiff, as we will see as we look at them in a little detail. L2-1 Copyright 2006, C. W. Gear Suppose the family of solutions to an ODE looks like the figure below. This looks to be an ideal problem for integration because almost no matter where we start the final solution finishes up on the blue curve. -

Nonlinear Problems 5
Nonlinear Problems 5 5.1 Introduction of Basic Concepts 5.1.1 Linear Versus Nonlinear Equations Algebraic equations A linear, scalar, algebraic equation in x has the form ax C b D 0; for arbitrary real constants a and b. The unknown is a number x. All other algebraic equations, e.g., x2 C ax C b D 0, are nonlinear. The typical feature in a nonlinear algebraic equation is that the unknown appears in products with itself, like x2 or x 1 2 1 3 e D 1 C x C 2 x C 3Š x C ::: We know how to solve a linear algebraic equation, x Db=a, but there are no general methods for finding the exact solutions of nonlinear algebraic equations, except for very special cases (quadratic equations constitute a primary example). A nonlinear algebraic equation may have no solution, one solution, or many solutions. The tools for solving nonlinear algebraic equations are iterative methods,wherewe construct a series of linear equations, which we know how to solve, and hope that the solutions of the linear equations converge to a solution of the nonlinear equation we want to solve. Typical methods for nonlinear algebraic equation equations are Newton’s method, the Bisection method, and the Secant method. Differential equations The unknown in a differential equation is a function and not a number. In a linear differential equation, all terms involving the unknown function are linear in the unknown function or its derivatives. Linear here means that the unknown function, or a derivative of it, is multiplied by a number or a known function. -

Numerical Methods for Ordinary Differential Equations
Numerical methods for ordinary differential equations Ulrik Skre Fjordholm May 1, 2018 Chapter 1 Introduction Consider the ordinary differential equation (ODE) x.t/ f .x.t/; t/; x.0/ x0 (1.1) P D D d d d where x0 R and f R R R . Under certain conditions on f there exists a unique solution of (1.1), and2 for certainW types of! functions f (such as when (1.1) is separable) there are techniques available for computing this solution. However, for most “real-world” examples of f , we have no idea how the solution actually looks like. We are left with no choice but to approximate the solution x.t/. Assume that we would like to compute the solution of (1.1) over a time interval t Œ0; T for some T > 01. The most common approach to finding an approximation of the solution of2 (1.1) starts by partitioning the time interval into a set of points t0; t1; : : : ; tN , where tn nh is a time step and h T is the step size2. A numerical method then computes an approximationD of the actual solution D N value x.tn/ at time t tn. We will denote this approximation by yn. The basis of most numerical D methods is the following simple computation: Integrate (1.1) over the time interval Œtn; tn 1 to get C Z tn 1 C x.tn 1/ x.tn/ f .x.s/; s/ ds: (1.2) C D C tn Although we could replace x.tn/ and x.tn 1/ by their approximations yn and yn 1, we cannot use the formula (1.2) directly because the integrandC depends on the exact solution x.s/C . -

The N-Body Problem Applied to Exoplanets
Chapter 1 The N-body problem applied to exoplanets 1.1 Motivation The N-body problem is the problem of solving the motion of N > 1 stars or planets that are mutually gravitationally attracting each other. The 2-body problem is a special case which can be solved analytically. The solutions to the 2-body problem are the Kepler orbits. For N > 2 there is, however, no analytical solution. The only way to solve the N > 2 problem is by numerical integration of the Newtonian equations of motion. Of course there are limiting cases where the N > 2 problem reduces to a set of independent N = 2 problems: To first order the orbit of the planets around the Sun are Kepler orbits: N = 2 solutions in which the two bodies are the Sun and the planet. That is because the mutual gravitational force between e.g. Venus and Earth is much smaller than the gravitational force of the Sun. So for the planets of our Solar System, and for most planets around other stars, the N-body problem can, to first order, be simplified into N 1 independent 2-body problems. That means that e.g. the − Earth’s orbit is only very slightly modified by the gravitational attraction by Venus or Mars. For most purposes we can ignore this tiny effect, meaning that the Kepler orbital characteristic are sufficiently accurate to describe most of what we want to know about the system. However, for exoplanetary systems where the planets are closer to each other, the situation may be different. -
Numerical Integration
Game Physics Game and Media Technology Master Program - Utrecht University Dr. Nicolas Pronost Numerical Integration Updating position • Recall that 퐹푂푅퐶퐸 = 푀퐴푆푆 × 퐴퐶퐶퐸퐿퐸푅퐴푇퐼푂푁 – If we assume that the mass is constant then 퐹 푝표, 푡 = 푚 ∗ 푎(푝표, 푡) ′ ′ – We know that 푣 푡 = 푎(푡) and 푝표 푡 = 푣(푡) ′′ – So we have 퐹 푝표, 푡 = 푚 ∗ 푝표 (푡) • This is a differential equation – Well studied branch of mathematics – Often difficult to solve in real-time applications Game Physics 3 Taylor series • Taylor expansion series of a function can be applied on 푝0 at t + ∆푡 푝표 푡 + ∆푡 ∆푡2 = 푝 푡 + ∆t ∗ 푝 ′ 푡 + 푝 ′′ 푡 + ⋯ 표 표 2 표 ∆푡푛 + 푝 푛 푡 푛! 표 • But of course we don’t know the values of the entire infinite series, at best we have 푝표 푡 and the first two derivatives Game Physics 4 First order approximation • Hopefully, if ∆푡 is small enough, we can use an approximation ′ 푝표 푡 + ∆푡 ≈ 푝표 푡 + ∆t ∗ 푝표 푡 • Separating out position and velocity gives 퐹(푡) 푣 푡 + ∆푡 = 푣 푡 + 푎 푡 ∆푡 = 푣 푡 + ∆푡 푚 푝표(푡 + ∆푡) = 푝표(푡) + 푣(푡)∆푡 Game Physics 5 Euler’s method 5.1 • This is known as Euler’s method 푣 푡 + ∆푡 = 푣 푡 + 푎 푡 ∆푡 푝표(푡 + ∆푡) = 푝표(푡) + 푣(푡)∆푡 푣(푡 − ∆푡) 푡 푎(푡 − ∆푡) 푣(푡) 푡 + ∆푡 푣(푡) 푣(푡 + ∆푡) 푎(푡) Game Physics 6 Euler’s method • So by assuming the velocity is constant for the time ∆푡 elapsed between two frames – We compute the acceleration of the object from the net force applied on it 푎 푡 = 퐹(푡)/푚 – We compute the velocity from the acceleration 푣 푡 + ∆푡 = 푣 푡 + 푎 푡 ∆푡 – We compute the position from the velocity 푝표 푡 + ∆푡 = 푝표 푡 + 푣(푡)∆푡 Game Physics 7 Issues with linear dynamics • We only look at a sequence of instants without meaning – E.g. -
Solving Differential Equations in R
Use R! Solving Differential Equations in R Bearbeitet von Karline Soetaert, Jeff Cash, Francesca Mazzia 1. Auflage 2012. Taschenbuch. xvi, 248 S. Paperback ISBN 978 3 642 28069 6 Format (B x L): 15,5 x 23,5 cm Gewicht: 409 g Weitere Fachgebiete > Mathematik > Stochastik > Mathematische Statistik Zu Inhaltsverzeichnis schnell und portofrei erhältlich bei Die Online-Fachbuchhandlung beck-shop.de ist spezialisiert auf Fachbücher, insbesondere Recht, Steuern und Wirtschaft. Im Sortiment finden Sie alle Medien (Bücher, Zeitschriften, CDs, eBooks, etc.) aller Verlage. Ergänzt wird das Programm durch Services wie Neuerscheinungsdienst oder Zusammenstellungen von Büchern zu Sonderpreisen. Der Shop führt mehr als 8 Millionen Produkte. Chapter 2 Initial Value Problems Abstract In the previous chapter we derived a simple finite difference method, namely the explicit Euler method, and we indicated how this can be analysed so that we can make statements concerning its stability and order of accuracy. If Euler’s method is used with constant time step h then it is convergent with an error of order O(h) for all sufficiently smooth problems. Thus, if we integrate from 0 to 1 with step h = 10−5, we will need to perform 105 function evaluations to complete the integration and obtain a solution with error O(h). To achieve extra accuracy using this method we could reduce the step size h. This is not in general efficient and in many cases it is preferable to use higher order methods rather than decreasing the step size with a lower order method to obtain higher accuracy. One of the main differences between Euler’s and higher order methods is that, whereas Euler’s method uses only information involving the value of y and its derivative (slope) at the start of the integration interval to advance to the next integration step, higher order methods use information at more than one point. -

MATH 1080 Spring 2020, Second Half of Semester Notes for the Remote Teaching 1
MATH 1080 Spring 2020, second half of semester Notes for the remote teaching 1. Numerical methods for Ordinary Differential Equations (ODEs). DEFINITION 1.1 (ODE of order p). d py d p−1y dy + a + ··· + a + a y = f (t;y;y0;:::;y(p−1)): (1.1) dt p p−1 dt p−1 1 dt 0 REMARK 1.1. An ODE of order p can be written as a system of p first-order equations, with the unknowns: 0 00 (p−2) (p−1) y1 = y;;y2 = y ; y3 = y ;;:::; yp−1 = y ;yp = y ; hence satisfying 8 y0 = y > 1 2 > y0 = y ; > 2 3 < . > y0 = y ; > p−1 p :> 0 yp = f (t;y1;y2;:::;yp−1) − ap−1yp − ··· − a1y2 − a0y1: EXAMPLE 1.1 (Logistic equation). y y0 = cy 1 − : (scalar equation) B EXAMPLE 1.2 (Lotka-Volterra). 0 y1 = c1y1(1 − b1y1 − d2y2) 0 (system of 2 first-order equations) y2 = c2y2(1 − b2y2 − d1y1): EXAMPLE 1.3 (Vibrating spring / simple harmonic motion). u00(x) + k(x)u0(x) + m(x)u(x) = f (x): (2nd order scalar equation) n n DEFINITION 1.2 (The Cauchy problem, Initial Value Problem (IVP)). Find y : I ! R ;y 2 C1(R ) such that y0 = f (t;y(t)); t 2 (0;T] (IVP) y(t0) = y0: n 1 Here I = [t0;T], y0 2 R is called ’initial datum’, and y(·) 2 C (R) satisfying (IVP) is a classical solution. Moreover, if f (t;y(t)) ≡ f (y(t)), the equation/system (IVP) is called ‘autonomous’. DEFINITION 1.3. -

Backward Differentiation Formulas
American Journal of Computational and Applied Mathematics 2014, 4(2): 51-59 DOI: 10.5923/j.ajcam.20140402.03 A Family of One-Block Implicit Multistep Backward Euler Type Methods Ajie I. J.1,*, Ikhile M. N. O.2, Onumanyi P.1 1National Mathematical Centre, Abuja, Nigeria 2Department of Mathematics, University of Benin, Benin City, Nigeria Abstract A family of k-step Backward Differentiation Formulas (BDFs)and the additional methods required to form blocks that possess L(α)-stability properties are derived by imposing order k on the general formula of continuous BDF. This leads to faster derivation of the coefficients compare to collocation and integrand approximation methods. Linear stability analysis of the resultant blocks show that they are L(α)-stable. Numerical examples are presented to show the efficacy of the methods. Keywords Backward Differentiation Formulas (BDFs), One-Block Implicit Backward Euler Type, L(α)-stable, A(α)-stable, Region of Absolute Stability (RAS) We require that the methods belonging to (1.4) converge 1. Introduction efficiently like (1.1) but with better accuracy of order k, k 1 . The popular one-step Backward Euler Method (BEM) is given by the formula yn11 y n h n f n n = 1, 2, 3, … (1.1) 2. Derivation of Formulae (1.4) (1.1) is known to possess a correct behaviour when the Consider the general linear multistep method given by stiffness ratio is severe in a stiff system of initial value kk problem of ordinary differential equations given in the form ry n r h n r f t n r, y n r (2.1) y f( t , y ); t [ a , b ] (1.2) rr00 where the step number k0, h t t is a variable y(), t00 y (1.3) n n1 n step length, αk and βk are both not zero. -

Numerical Solution of Ordinary Differential Equations
11 Numerical Solution of Ordinary Differential Equations In this chapter we deal with the numerical solutions of the Cauchy problem for ordinary differential equations (henceforth abbreviated by ODEs). After a brief review of basic notions about ODEs, we introduce the most widely used techniques for the numerical approximation of scalar equations. The concepts of consistency, convergence, zero-stability and absolute stability will be addressed. Then, we extend our analysis to systems of ODEs, with emphasis on stiff problems. 11.1 The Cauchy Problem The Cauchy problem (also known as the initial-value problem) consists of finding the solution of an ODE, in the scalar or vector case, given suitable initial conditions. In particular, in the scalar case, denoting by I an interval of R containing the point t0, the Cauchy problem associated with a first order ODE reads: find a real-valued function y C1(I), such that ∈ y′(t)=f(t, y(t)),tI, ∈ (11.1) ! y(t0)=y0, where f(t, y) is a given real-valued function in the strip S = I ( , + ), which is continuous with respect to both variables. Should f×depend−∞ on∞ t only through y, the differential equation is called autonomous. 470 11. Numerical Solution of Ordinary Differential Equations Most of our analysis will be concerned with one single differential equa- tion (scalar case). The extension to the case of systems of first-order ODEs will be addressed in Section 11.9. If f is continuous with respect to t, then the solution to (11.1) satisfies t y(t) y = f(τ,y(τ))dτ.