The N-Body Problem Applied to Exoplanets
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Numerical Solution of Ordinary Differential Equations
NUMERICAL SOLUTION OF ORDINARY DIFFERENTIAL EQUATIONS Kendall Atkinson, Weimin Han, David Stewart University of Iowa Iowa City, Iowa A JOHN WILEY & SONS, INC., PUBLICATION Copyright c 2009 by John Wiley & Sons, Inc. All rights reserved. Published by John Wiley & Sons, Inc., Hoboken, New Jersey. Published simultaneously in Canada. No part of this publication may be reproduced, stored in a retrieval system, or transmitted in any form or by any means, electronic, mechanical, photocopying, recording, scanning, or otherwise, except as permitted under Section 107 or 108 of the 1976 United States Copyright Act, without either the prior written permission of the Publisher, or authorization through payment of the appropriate per-copy fee to the Copyright Clearance Center, Inc., 222 Rosewood Drive, Danvers, MA 01923, (978) 750-8400, fax (978) 646-8600, or on the web at www.copyright.com. Requests to the Publisher for permission should be addressed to the Permissions Department, John Wiley & Sons, Inc., 111 River Street, Hoboken, NJ 07030, (201) 748-6011, fax (201) 748-6008. Limit of Liability/Disclaimer of Warranty: While the publisher and author have used their best efforts in preparing this book, they make no representations or warranties with respect to the accuracy or completeness of the contents of this book and specifically disclaim any implied warranties of merchantability or fitness for a particular purpose. No warranty may be created ore extended by sales representatives or written sales materials. The advice and strategies contained herin may not be suitable for your situation. You should consult with a professional where appropriate. Neither the publisher nor author shall be liable for any loss of profit or any other commercial damages, including but not limited to special, incidental, consequential, or other damages. -

Chapter 16: Differential Equations
✐ ✐ ✐ ✐ Chapter 16 Differential Equations A vast number of mathematical models in various areas of science and engineering involve differ- ential equations. This chapter provides a starting point for a journey into the branch of scientific computing that is concerned with the simulation of differential problems. We shall concentrate mostly on developing methods and concepts for solving initial value problems for ordinary differential equations: this is the simplest class (although, as you will see, it can be far from being simple), yet a very important one. It is the only class of differential problems for which, in our opinion, up-to-date numerical methods can be learned in an orderly and reasonably complete fashion within a first course text. Section 16.1 prepares the setting for the numerical treatment that follows in Sections 16.2–16.6 and beyond. It also contains a synopsis of what follows in this chapter. Numerical methods for solving boundary value problems for ordinary differential equations receive a quick review in Section 16.7. More fundamental difficulties arise here, so this section is marked as advanced. Most mathematical models that give rise to differential equations in practice involve partial differential equations, where there is more than one independent variable. The numerical treatment of partial differential equations is a vast and complex subject that relies directly on many of the methods introduced in various parts of this text. An orderly development belongs in a more advanced text, though, and our own description in Section 16.8 is downright anecdotal, relying in part on examples introduced earlier. 16.1 Initial value ordinary differential equations Consider the problem of finding a function y(t) that satisfies the ordinary differential equation (ODE) dy = f (t, y), a ≤ t ≤ b. -
Differential Equations
Differential Equations • Overview of differential equation • Initial value problem • Explicit numeric methods • Implicit numeric methods • Modular implementation Physics-based simulation • It’s an algorithm that produces a sequence of states over time under the laws of physics • What is a state? Physics-based simulation xi xi+1 xi xi+1 = xi +∆x ∆x Physics-based simulation xi Newtonian laws gravity wind gust xi+1 elastic force . integrator xi xi+1 = xi +∆x ∆x Differential equations • What is a differential equation? • It describes the relation between an unknown function and its derivatives • Ordinary differential equation (ODE) • is the relation that contains functions of only one independent variable and its derivatives Ordinary differential equations An ODE is an equality equation involving a function and its derivatives known function x˙(t)=f(x(t)) time derivative of the unknown function that unknown function evaluates the state given time What does it mean to “solve” an ODE? Symbolic solutions • Standard introductory differential equation courses focus on finding solutions analytically • Linear ODEs can be solved by integral transforms • Use DSolve[eqn,x,t] in Mathematica Differential equation: x˙(t)= kx(t) − kt Solution: x(t)=e− Numerical solutions • In this class, we will be concerned with numerical solutions • Derivative function f is regarded as a black box • Given a numerical value x and t, the black box will return the time derivative of x Physics-based simulation xi Newtonian laws gravity wind gust xi+1 elastic force . integrator -

Introduction to Numerical Analysis
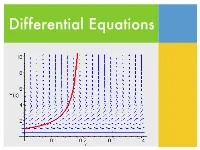
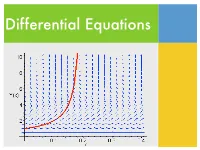
INTRODUCTION TO NUMERICAL ANALYSIS Cho, Hyoung Kyu Department of Nuclear Engineering Seoul National University 10. NUMERICAL INTEGRATION 10.1 Background 10.11 Local Truncation Error in Second‐Order 10.2 Euler's Methods Range‐Kutta Method 10.3 Modified Euler's Method 10.12 Step Size for Desired Accuracy 10.4 Midpoint Method 10.13 Stability 10.5 Runge‐Kutta Methods 10.14 Stiff Ordinary Differential Equations 10.6 Multistep Methods 10.7 Predictor‐Corrector Methods 10.8 System of First‐Order Ordinary Differential Equations 10.9 Solving a Higher‐Order Initial Value Problem 10.10 Use of MATLAB Built‐In Functions for Solving Initial‐Value Problems 10.1 Background Ordinary differential equation A differential equation that has one independent variable A first‐order ODE . The first derivative of the dependent variable with respect to the independent variable Example Rates of water inflow and outflow The time rate of change of the mass in the tank Equation for the rate of height change 10.1 Background Time dependent problem Independent variable: time Dependent variable: water level To obtain a specific solution, a first‐order ODE must have an initial condition or constraint that specifies the value of the dependent variable at a particular value of the independent variable. In typical time‐dependent problems . Initial condition . Initial value problem (IVP) 10.1 Background First order ODE statement General form Ex) . Flow lines Analytical solution In many situations an analytical solution is not possible! Numerical solution of a first‐order ODE A set of discrete points that approximate the function y(x) Domain of the solution: , N subintervals 10.1 Background Overview of numerical methods used/or solving a first‐order ODE Start from the initial value Then, estimate the value at a second nearby point third point … Single‐step and multistep approach . -
Numerical Integration
Game Physics Game and Media Technology Master Program - Utrecht University Dr. Nicolas Pronost Numerical Integration Updating position • Recall that 퐹푂푅퐶퐸 = 푀퐴푆푆 × 퐴퐶퐶퐸퐿퐸푅퐴푇퐼푂푁 – If we assume that the mass is constant then 퐹 푝표, 푡 = 푚 ∗ 푎(푝표, 푡) ′ ′ – We know that 푣 푡 = 푎(푡) and 푝표 푡 = 푣(푡) ′′ – So we have 퐹 푝표, 푡 = 푚 ∗ 푝표 (푡) • This is a differential equation – Well studied branch of mathematics – Often difficult to solve in real-time applications Game Physics 3 Taylor series • Taylor expansion series of a function can be applied on 푝0 at t + ∆푡 푝표 푡 + ∆푡 ∆푡2 = 푝 푡 + ∆t ∗ 푝 ′ 푡 + 푝 ′′ 푡 + ⋯ 표 표 2 표 ∆푡푛 + 푝 푛 푡 푛! 표 • But of course we don’t know the values of the entire infinite series, at best we have 푝표 푡 and the first two derivatives Game Physics 4 First order approximation • Hopefully, if ∆푡 is small enough, we can use an approximation ′ 푝표 푡 + ∆푡 ≈ 푝표 푡 + ∆t ∗ 푝표 푡 • Separating out position and velocity gives 퐹(푡) 푣 푡 + ∆푡 = 푣 푡 + 푎 푡 ∆푡 = 푣 푡 + ∆푡 푚 푝표(푡 + ∆푡) = 푝표(푡) + 푣(푡)∆푡 Game Physics 5 Euler’s method 5.1 • This is known as Euler’s method 푣 푡 + ∆푡 = 푣 푡 + 푎 푡 ∆푡 푝표(푡 + ∆푡) = 푝표(푡) + 푣(푡)∆푡 푣(푡 − ∆푡) 푡 푎(푡 − ∆푡) 푣(푡) 푡 + ∆푡 푣(푡) 푣(푡 + ∆푡) 푎(푡) Game Physics 6 Euler’s method • So by assuming the velocity is constant for the time ∆푡 elapsed between two frames – We compute the acceleration of the object from the net force applied on it 푎 푡 = 퐹(푡)/푚 – We compute the velocity from the acceleration 푣 푡 + ∆푡 = 푣 푡 + 푎 푡 ∆푡 – We compute the position from the velocity 푝표 푡 + ∆푡 = 푝표 푡 + 푣(푡)∆푡 Game Physics 7 Issues with linear dynamics • We only look at a sequence of instants without meaning – E.g. -

MATH 1080 Spring 2020, Second Half of Semester Notes for the Remote Teaching 1
MATH 1080 Spring 2020, second half of semester Notes for the remote teaching 1. Numerical methods for Ordinary Differential Equations (ODEs). DEFINITION 1.1 (ODE of order p). d py d p−1y dy + a + ··· + a + a y = f (t;y;y0;:::;y(p−1)): (1.1) dt p p−1 dt p−1 1 dt 0 REMARK 1.1. An ODE of order p can be written as a system of p first-order equations, with the unknowns: 0 00 (p−2) (p−1) y1 = y;;y2 = y ; y3 = y ;;:::; yp−1 = y ;yp = y ; hence satisfying 8 y0 = y > 1 2 > y0 = y ; > 2 3 < . > y0 = y ; > p−1 p :> 0 yp = f (t;y1;y2;:::;yp−1) − ap−1yp − ··· − a1y2 − a0y1: EXAMPLE 1.1 (Logistic equation). y y0 = cy 1 − : (scalar equation) B EXAMPLE 1.2 (Lotka-Volterra). 0 y1 = c1y1(1 − b1y1 − d2y2) 0 (system of 2 first-order equations) y2 = c2y2(1 − b2y2 − d1y1): EXAMPLE 1.3 (Vibrating spring / simple harmonic motion). u00(x) + k(x)u0(x) + m(x)u(x) = f (x): (2nd order scalar equation) n n DEFINITION 1.2 (The Cauchy problem, Initial Value Problem (IVP)). Find y : I ! R ;y 2 C1(R ) such that y0 = f (t;y(t)); t 2 (0;T] (IVP) y(t0) = y0: n 1 Here I = [t0;T], y0 2 R is called ’initial datum’, and y(·) 2 C (R) satisfying (IVP) is a classical solution. Moreover, if f (t;y(t)) ≡ f (y(t)), the equation/system (IVP) is called ‘autonomous’. DEFINITION 1.3. -

Refactorization of the Midpoint Rule
REFACTORIZATION OF THE MIDPOINT RULE JOHN BURKARDT ∗ AND CATALIN TRENCHEA† Key words. Backward Euler, midpoint rule, second-order, symplectic, Hamiltonian, energy conservation, A-stable and B-stable, blackbox / legacy code, partitioning algorithms, time adaptivity Abstract. An alternative formulation of the midpoint method is employed to analyze its advantages as an implicit second-order absolutely stable timestepping method. Legacy codes originally using the backward Euler method can be upgraded to this method by inserting a single line of new code. We show that the midpoint method, and a theta-like generalization, are B-stable. We outline three estimates of local truncation error that allow adaptive time-stepping. 1. One line of code to change a Backward Euler code into to a second-order, unconditionally stable, conservative method. For the numerical approximation of a general evolution equation: y0(t) = f (t;y(t)); (1.1) on the mesh points ftngn≥0, and with the timestep tn, such that: 1 tn+1 = tn + tn; tn+1=2 = tn + 2 tn; we recall the classical midpoint quadrature rule: yn+1 − yn = f (tn+1=2;yn+1=2); (1.2) tn where yn ≈ y(tn). The method (1.2) is ubiquitously presented and used [8, 11, 15, 18, 19, 21, 26, 27, 29–31] in the apparently different form: yn+1 − yn yn+1 + yn = f tn+1=2; : (1.3) tn 2 The reason for the wide use of (1.3) instead of (1.2) (see e.g. [27, page 133]) is due to the natural question: ‘but which value should we take for yn+1=2?’. -

A Brief Note on Linear Multistep Methods
A brief note on linear multistep methods Alen Alexanderian* Abstract We review some key results regarding linear multistep methods for solving intial value prob- lems. Moreover, we discuss some common classes of linear multistep methods. 1 Basic theory Here we provide a summary of key results regarding stability and consistency of linear mul- tistep methods. We focus on the initial value problem, 0 y = f(x; y); x 2 [a; b]; y(a) = y0: (1.1) Here y(x) 2 R is the state variable, and all throughout, we assume that f satisfies a uniform Lipschitz condition with respect to y. Definition of a multistep method. The generic description of a linear multistep method is as follows: define nodes xn = a + nh, n = 0;:::;N, with h = (b − a)=N. The general form of a multistep method is p p X X yn+1 = αjyn−j + h βjf(xn−j; yn−j); n ≥ p: (1.2) j=0 j=−1 p p Here fαigi=0, and fβigi=−1 are constant coefficients, and p ≥ 0. If either αp 6= 0 or βp 6= 0, then the method is called a p + 1 step method. The initial values, y0; y1; : : : ; yp, must be obtained by other means (e.g., an appropriate explicit method). Note that if β−1 = 0, then the method is explicit, and if β−1 6= 0, the method is implicit. Also, here we use the convention that y(xn) is the exact value of y at xn and yn is the numerically computed approximation to y(xn); i.e., yn ≈ y(xn). -
Differential Equations
Differential Equations • Overview of differential equation! • Initial value problem! • Explicit numeric methods! • Implicit numeric methods! • Modular implementation Physics-based simulation • An algorithm that produces a sequence of states over time under the laws of physics! • What is a state? Physics simulation xi differential equations xi+1 integrator xi xi+1 = xi +∆x ∆x Differential equations • What is a differential equation?! • It describes the relation between an unknown function and its derivatives! • Ordinary differential equation (ODE)! • is the relation that contains functions of only one independent variable and its derivatives Ordinary differential equations An ODE is an equality equation involving a function and its derivatives known function x˙(t)=f(x(t)) time derivative of the unknown function that unknown function evaluates the state given time What does it mean to “solve” an ODE? Symbolic solutions • Standard introductory differential equation courses focus on finding solutions analytically! • Linear ODEs can be solved by integral transforms! • Use DSolve[eqn,x,t] in Mathematica Differential equation: x˙(t)= kx(t) − kt Solution: x(t)=e− Numerical solutions • In this class, we will be concerned with numerical solutions! • Derivative function f is regarded as a black box! • Given a numerical value x and t, the black box will return the time derivative of x Physics-based simulation xi differential equations xi+1 integrator xi xi+1 = xi +∆x ∆x • Overview of differential equation! • Initial value problem! • Explicit numeric -

Introduction to Numerical Methods for Ordinary Differential Equations Charles-Edouard Bréhier
Introduction to numerical methods for Ordinary Differential Equations Charles-Edouard Bréhier To cite this version: Charles-Edouard Bréhier. Introduction to numerical methods for Ordinary Differential Equations. Licence. Introduction to numerical methods for Ordinary Differential Equations, Pristina, Kosovo, Serbia. 2016. cel-01484274 HAL Id: cel-01484274 https://hal.archives-ouvertes.fr/cel-01484274 Submitted on 7 Mar 2017 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Introduction to numerical methods for Ordinary Differential Equations C. -E. Bréhier November 14, 2016 Abstract The aims of these lecture notes are the following. • We introduce Euler numerical schemes, and prove existence and uniqueness of solutions of ODEs passing to the limit in a discretized version. • We provide a general theory of one-step integrators, based on the notions of sta- bility and consistency. • We propose some procedures which lead to construction of higher-order methods. • We discuss splitting and composition methods. • We finally focus on qualitative properties of Hamiltonian systems and of their discretizations. Good references, in particular for integration of Hamiltonian systems, are the mono- graphs Geometric Numerical Integration, by E. Hairer, C. Lubich and G. Wan- ner, and Molecular Dynamics. -

One-Step Methods for Odes
Numerical Methods II One-Step Methods for ODEs Aleksandar Donev Courant Institute, NYU1 [email protected] 1MATH-GA.2020-001 / CSCI-GA.2421-001, Spring 2019 Feb 12th, 2019 A. Donev (Courant Institute) ODEs 2/12/2019 1 / 35 Outline 1 Initial Value Problems 2 One-step methods for ODEs 3 Convergence (after LeVeque) 4 MATLAB ode suite A. Donev (Courant Institute) ODEs 2/12/2019 2 / 35 Initial Value Problems Initial Value Problems A. Donev (Courant Institute) ODEs 2/12/2019 3 / 35 Initial Value Problems Initial Value Problems We want to numerically approximate the solution to the ordinary differential equation dx = x0(t) =x _ (t) = f (x(t); t); dt with initial condition x(t = 0) = x(0) = x0. This means that we want to generate an approximation to the trajectory x(t), for example, a sequence x(tk = k∆t) for k = 1; 2;:::; N = T =∆t, where ∆t is the time step used to discretize time. If f is independent of t we call the system autonomous. Note that second-order equations can be written as a system of first-order equations: ( d2x x_ (t) = v(t) 2 =x ¨(t) = f [x(t); t] ≡ dt v_ (t) = f [x(t); t] A. Donev (Courant Institute) ODEs 2/12/2019 4 / 35 Initial Value Problems Relation to Numerical Integration If f is independent of x then the problem is equivalent to numerical integration Z t x(t) = x0 + f (s)ds: 0 More generally, we cannot compute the integral because it depends on the unknown answer x(t): Z t x(t) = x0 + f (x(s); s) ds: 0 Numerical methods are based on approximations of f (x(s); s) into the \future" based on knowledge of x(t) in the \past" and \present". -

Math 361S Lecture Notes Numerical Solution of Odes
Math 361S Lecture Notes Numerical solution of ODEs Holden Lee, Jeffrey Wong April 1, 2020 Contents 1 Overview2 2 Basics 3 2.1 First-order ODE; Initial value problems.....................4 2.2 Converting a higher-order ODE to a first-order ODE.............4 2.3 Other types of differential equations.......................6 2.4 Comparison to integration............................6 2.5 Visualization using vector fields.........................7 2.6 Sensitivity.....................................8 3 Euler's method 10 3.1 Forward Euler's method............................. 12 3.2 Convergence.................................... 13 3.3 Euler's method: error analysis.......................... 15 3.3.1 Local truncation error.......................... 15 3.3.2 From local to global error........................ 15 3.4 Interpreting the error bound........................... 17 3.5 Order....................................... 18 3.6 Backward Euler's method............................ 18 4 Consistency, stability, and convergence 19 4.1 Consistency.................................... 20 4.2 Stability...................................... 20 4.3 General convergence theorem.......................... 21 4.4 Example of an unstable method......................... 22 5 Runge-Kutta methods 23 5.1 Setup: one step methods............................. 23 5.2 A better way: Explicit Runge-Kutta methods................. 25 5.2.1 Explicit midpoint rule (Modified Euler's method)........... 25 1 5.2.2 Higher-order explicit methods...................... 27 5.3 Implicit methods................................. 28 5.3.1 Example: deriving the trapezoidal method............... 29 5.4 Summary of Runge-Kutta methods....................... 30 6 Absolute stability and stiff equations 31 6.1 An example of a stiff problem.......................... 31 6.2 The test equation: Analysis for Euler's method................ 33 6.3 Analysis for a general ODE........................... 34 6.4 Stability regions.................................. 35 6.5 A-stability and L-stability; Stability in practice...............