Mechanical Computing
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Simulating Physics with Computers
International Journal of Theoretical Physics, VoL 21, Nos. 6/7, 1982 Simulating Physics with Computers Richard P. Feynman Department of Physics, California Institute of Technology, Pasadena, California 91107 Received May 7, 1981 1. INTRODUCTION On the program it says this is a keynote speech--and I don't know what a keynote speech is. I do not intend in any way to suggest what should be in this meeting as a keynote of the subjects or anything like that. I have my own things to say and to talk about and there's no implication that anybody needs to talk about the same thing or anything like it. So what I want to talk about is what Mike Dertouzos suggested that nobody would talk about. I want to talk about the problem of simulating physics with computers and I mean that in a specific way which I am going to explain. The reason for doing this is something that I learned about from Ed Fredkin, and my entire interest in the subject has been inspired by him. It has to do with learning something about the possibilities of computers, and also something about possibilities in physics. If we suppose that we know all the physical laws perfectly, of course we don't have to pay any attention to computers. It's interesting anyway to entertain oneself with the idea that we've got something to learn about physical laws; and if I take a relaxed view here (after all I'm here and not at home) I'll admit that we don't understand everything. -
The Evolution of Tower Clock Movements and Their Design Over the Past 1000 Years
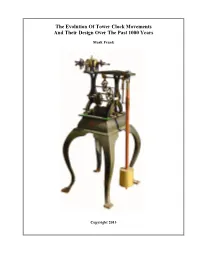
The Evolution Of Tower Clock Movements And Their Design Over The Past 1000 Years Mark Frank Copyright 2013 The Evolution Of Tower Clock Movements And Their Design Over The Past 1000 Years TABLE OF CONTENTS Introduction and General Overview Pre-History ............................................................................................... 1. 10th through 11th Centuries ........................................................................ 2. 12th through 15th Centuries ........................................................................ 4. 16th through 17th Centuries ........................................................................ 5. The catastrophic accident of Big Ben ........................................................ 6. 18th through 19th Centuries ........................................................................ 7. 20th Century .............................................................................................. 9. Tower Clock Frame Styles ................................................................................... 11. Doorframe and Field Gate ......................................................................... 11. Birdcage, End-To-End .............................................................................. 12. Birdcage, Side-By-Side ............................................................................. 12. Strap, Posted ............................................................................................ 13. Chair Frame ............................................................................................. -

Mechanical Parts of Clocks Or Watches in General
G04B CPC COOPERATIVE PATENT CLASSIFICATION G PHYSICS (NOTES omitted) INSTRUMENTS G04 HOROLOGY G04B MECHANICALLY-DRIVEN CLOCKS OR WATCHES; MECHANICAL PARTS OF CLOCKS OR WATCHES IN GENERAL; TIME PIECES USING THE POSITION OF THE SUN, MOON OR STARS (spring- or weight-driven mechanisms in general F03G; electromechanical clocks or watches G04C; electromechanical clocks with attached or built- in means operating any device at pre-selected times or after predetermined time intervals G04C 23/00; clocks or watches with stop devices G04F 7/08) NOTE This subclass covers mechanically-driven clocks or clockwork calendars, and the mechanical part of such clocks or calendars. WARNING In this subclass non-limiting references (in the sense of paragraph 39 of the Guide to the IPC) may still be displayed in the scheme. Driving mechanisms 1/145 . {Composition and manufacture of the springs (compositions and manufacture of 1/00 Driving mechanisms {(driving mechanisms for components, wheels, spindles, pivots, or the Turkish time G04B 19/22; driving mechanisms like G04B 13/026; compositions of component in the hands G04B 45/043; driving mechanisms escapements G04B 15/14; composition and for phonographic apparatus G11B 19/00; springs, manufacture or hairsprings G04B 17/066; driving weight engines F03G; driving mechanisms compensation for the effects of variations of for cinematography G03B 1/00; driving mechnisms; temperature of springs using alloys, especially driving mechanisms for time fuses for missiles F42C; for hairsprings G04B 17/227; materials for driving mechnisms for toys A63H 29/00)} bearings of clockworks G04B 31/00; iron and 1/02 . with driving weight steel alloys C22C; heat treatment and chemical 1/04 . -

History of Computing Prehistory – the World Before 1946
Social and Professional Issues in IT Prehistory - the world before 1946 History of Computing Prehistory – the world before 1946 The word “Computing” Originally, the word computing was synonymous with counting and calculating, and a computer was a person who computes. Since the advent of the electronic computer, it has come to also mean the operation and usage of these machines, the electrical processes carried out within the computer hardware itself, and the theoretical concepts governing them. Prehistory: Computing related events 750 BC - 1799 A.D. 750 B.C. The abacus was first used by the Babylonians as an aid to simple arithmetic at sometime around this date. 1492 Leonardo da Vinci produced drawings of a device consisting of interlocking cog wheels which could be interpreted as a mechanical calculator capable of addition and subtraction. A working model inspired by this plan was built in 1968 but it remains controversial whether Leonardo really had a calculator in mind 1588 Logarithms are discovered by Joost Buerghi 1614 Scotsman John Napier invents an ingenious system of moveable rods (referred to as Napier's Rods or Napier's bones). These were based on logarithms and allowed the operator to multiply, divide and calculate square and cube roots by moving the rods around and placing them in specially constructed boards. 1622 William Oughtred developed slide rules based on John Napier's logarithms 1623 Wilhelm Schickard of Tübingen, Württemberg (now in Germany), built the first discrete automatic calculator, and thus essentially started the computer era. His device was called the "Calculating Clock". This mechanical machine was capable of adding and subtracting up to 6 digit numbers, and warned of an overflow by ringing a bell. -

Flight Results of the Inflatesail Spacecraft and Future Applications of Dragsails
SSC18-XI-04 FLIGHT RESULTS OF THE INFLATESAIL SPACECRAFT AND FUTURE APPLICATIONS OF DRAGSAILS B Taylor, C. Underwood, A. Viquerat, S Fellowes, R. Duke, B. Stewart, G. Aglietti, C. Bridges Surrey Space Centre, University of Surrey Guildford, GU2 7XH, United Kingdom, +44(0)1483 686278, [email protected] M. Schenk University of Bristol Bristol, Avon, BS8 1TH, United Kingdom, +44 (0)117 3315364, [email protected] C. Massimiani Surrey Satellite Technology Ltd. 20 Stephenson Rd, Guildford GU2 7YE; United Kingdom, +44 (0)1483 803803, [email protected] D. Masutti, A. Denis Von Karman Institute for Fluid Dynamics, Waterloosesteenweg 72, B-1640 Sint-Genesius-Rode, Belgium, +32 2 359 96 11, [email protected] ABSTRACT The InflateSail CubeSat, designed and built at the Surrey Space Centre (SSC) at the University of Surrey, UK, for the Von Karman Institute (VKI), Belgium, is one of the technology demonstrators for the QB50 programme. The 3.2 kilogram InflateSail is “3U” in size and is equipped with a 1 metre long inflatable boom and a 10 square metre deployable drag sail. InflateSail's primary goal is to demonstrate the effectiveness of using a drag sail in Low Earth Orbit (LEO) to dramatically increase the rate at which satellites lose altitude and re-enter the Earth's atmosphere. InflateSail was launched on Friday 23rd June 2017 into a 505km Sun-synchronous orbit. Shortly after the satellite was inserted into its orbit, the satellite booted up and automatically started its successful deployment sequence and quickly started its decent. The spacecraft exhibited varying dynamic modes, capturing in-situ attitude data throughout the mission lifetime. -

Made in Space, We Propose an Entirely New Concept
EXECUTIVE SUMMARY “Those who control the spice control the universe.” – Frank Herbert, Dune Many interesting ideas have been conceived for building space-based infrastructure in cislunar space. From O’Neill’s space colonies, to solar power satellite farms, and even prospecting retrieved near earth asteroids. In all the scenarios, one thing remained fixed - the need for space resources at the outpost. To satisfy this need, O’Neill suggested an electromagnetic railgun to deliver resources from the lunar surface, while NASA’s Asteroid Redirect Mission called for a solar electric tug to deliver asteroid materials from interplanetary space. At Made In Space, we propose an entirely new concept. One which is scalable, cost effective, and ensures that the abundant material wealth of the inner solar system becomes readily available to humankind in a nearly automated fashion. We propose the RAMA architecture, which turns asteroids into self-contained spacecraft capable of moving themselves back to cislunar space. The RAMA architecture is just as capable of transporting conventional sized asteroids on the 10m length scale as transporting asteroids 100m or larger, making it the most versatile asteroid retrieval architecture in terms of retrieved-mass capability. ii This report describes the results of the Phase I study funded by the NASA NIAC program for Made In Space to establish the concept feasibility of using space manufacturing to convert asteroids into autonomous, mechanical spacecraft. Project RAMA, Reconstituting Asteroids into Mechanical Automata, is designed to leverage the future advances of additive manufacturing (AM), in-situ resource utilization (ISRU) and in-situ manufacturing (ISM) to realize enormous efficiencies in repeated asteroid redirect missions. -

United States Patent (19) (11) 4,228,533 Siefert (45) Oct
United States Patent (19) (11) 4,228,533 Siefert (45) Oct. 14, 1980 54 AUTONOMOUSPENDULUMMECHANISM adapted to be attached as a unit to a clockwork, com FOR CLOCKWORKS prises a supporting plate adapted to be attached to a clockwork casing in overlying spaced relationship to (75) Inventor: Roland Siefert, Bad Durrheim, Fed. the front face of the casing. The supporting plate is Rep. of Germany fastened to the casing by a fastening device which is (73) Assignee: Kienzle Uhrenfabriken GmbH, concentric with the spindles for the clock hands and Schwenningen, Fed. Rep. of through which said spindles may project to the exterior Germany of the plate. A pivot bearing is provided on the support (21) Appl. No.: 23,365 ing plate vertically above the spindles adjacent the upper edge of the casing, and the lower edge of the 22 Filed: Mar. 23, 1979 supporting plate carries a circuit board having an elec (30) Foreign Application Priority Data trically energizable coil thereon located immediately Fed. Rep. of Germany ... 78.09694U) below the clockwork casing comprising a portion of an Apr. 1, 1978 (DE) electrical drive mechanism. A pendulum arm extends 51) Int. C. ...................... G04B 15/00; G04B 17/02; from the pivot bearing for swinging motion across the G04B 37/00 front face of the casing in the region between the sup 52 U.S. C. .................................... 368/134; 368/179; porting plate and casing, and has, at its lower end, a 368/278 permanent magnet which cooperates with the coil to 58 Field of Search ................... 58/129, 131, 132, 29, drive the pendulum. -

Session 2020-21 (PERIODIC TEST II PORTION) Subject: COMPUTER Class : V Chapter 1: EVOLUTION of COMPUTERS Students to Read the Fo
Session 2020-21 (PERIODIC TEST II PORTION) Subject: COMPUTER Class : V Chapter 1: EVOLUTION OF COMPUTERS DAY-1 Students to read the following topics thoroughly: Every aspect of our lives in this present era has been influenced by the most advanced machine known as computer. Initially computers were used only by scientists and engineers for complex calculations and were very expensive. Nowadays, computers can be afforded by individuals and small organizations. Computers are extensively used in banks, hospitals, media and entertainment, industries, schools, homes, space technology and research, railways, airports and so on. The term ‘Computer’ is derived from the word, ‘compute’ which means to calculate but a computer is not limited to perform only calculations. A computer is a versatile device that can handle different applications at the same time. Now, let us glance through the major milestones in the journey leading to the evolution of present day computer. ❖ HISTORY OF COMPUTERS: Right from abacus - the first counting device, many devices were invented, leading to the development of computers. ❖ COMPUTING DEVICES: 3000 BC ABACUS: ➢ Abacus was the first mechanical device for calculations, developed in China. ➢ It was made up of a wooden frame with rods, each having beads. ➢ The frame is divided into two parts – Heaven and Earth. ➢ Each rod in Heaven has 2 beads and each rod in Earth has 5 beads. ➢ This device was used for addition, subtraction, multiplication and division. ASSIGNMENT: (To be written in computer notebook, both questions & answers) Q 1. In which country was Abacus developed? Ans: Q 2. Computer has been derived from which word? Ans: DAY-2 Students to read the following topics thoroughly: PASCAL ADDING MACHINE: ➢ Pascal adding machine was the first mechanical calculator invented by Blaise Pascal, a French mathematician at the age of 19. -

Clockwork Prosthetic Limbs
Clockwork Prosthetic Limbs aithful readers of Popular Invention fortable and functional artificial limbs from will, of course, remember our June leather and wood. Mister Gillingham’s F1872 issue in which we featured a work has been described as strong, light, profile of master Dwarfish craftsman, Elrich durable and unlikely to get out of repair. Clocktinker and his most famous invention: The two craftsmen got along like fast the Clockwork Servant. friends and, in less than a month, had de- A gentle and generous soul, Master Clock- vised a prototype which married Master tinker took the perversion of his invention Clocktinker’s brilliant and lightwork clock- by nefarious Mastermind, Count Iglio Ca- work with Mister Gillingham’s beautiful gliostro, as a wound upon his heart. Though leatherwork. They further consulted none none would argue culpability on the part of other than Florence Nightingale, an expert Master Clocktinker for the injury caused on battlefield injuries, to help refine the throughout New Europa by Count Caglios- control system and fitting of their new in- tro’s Clockwork Warriors, he has neverthe- vention. less sworn to make amends. Each Gillingham and Clocktinker Pros- While visiting the Dwarfhold of Black thetic Limb must be custom fitted to the Hold, Master Clocktinker observed anoth- recipient. Legs operate more or less au- er Dwarf feeding coal into a hopper with tomatically and work well with the body’s the aid of a clockwork prosthetic arm. Such natural motion to allow a wearer to stand, devices, a boon to those who have suffered sit, walk, or even run. -

A Brief History of IT
IT Computer Technical Support Newsletter A Brief History of IT May 23, 2016 Vol.2, No.29 TABLE OF CONTENTS Introduction........................1 Pre-mechanical..................2 Mechanical.........................3 Electro-mechanical............4 Electronic...........................5 Age of Information.............6 Since the dawn of modern computers, the rapid digitization and growth in the amount of data created, shared, and consumed has transformed society greatly. In a world that is interconnected, change happens at a startling pace. Have you ever wondered how this connected world of ours got connected in the first place? The IT Computer Technical Support 1 Newsletter is complements of Pejman Kamkarian nformation technology has been around for a long, long time. Basically as Ilong as people have been around! Humans have always been quick to adapt technologies for better and faster communication. There are 4 main ages that divide up the history of information technology but only the latest age (electronic) and some of the electromechanical age really affects us today. 1. Pre-Mechanical The earliest age of technology. It can be defined as the time between 3000 B.C. and 1450 A.D. When humans first started communicating, they would try to use language to make simple pictures – petroglyphs to tell a story, map their terrain, or keep accounts such as how many animals one owned, etc. Petroglyph in Utah This trend continued with the advent of formal language and better media such as rags, papyrus, and eventually paper. The first ever calculator – the abacus was invented in this period after the development of numbering systems. 2 | IT Computer Technical Support Newsletter 2. -

Quantum-Mechanical Computers, If They Can Be Constructed, Will Do Things No Ordinary Computer Can Quantum-Mechanical Computers
Quantum-mechanical computers, if they can be constructed, will do things no ordinary computer can Quantum-Mechanical Computers by Seth Lloyd very two years for the past 50, computers have become twice as fast while their components have become half as big. Circuits now contain wires and transistors that measure only one hundredth of a human hair in width. Because of this ex- Eplosive progress, today’s machines are millions of times more powerful than their crude ancestors. But explosions do eventually dissipate, and integrated-circuit technology is running up against its limits. 1 Advanced lithographic techniques can yield parts /100 the size of what is currently avail- able. But at this scale—where bulk matter reveals itself as a crowd of individual atoms— integrated circuits barely function. A tenth the size again, the individuals assert their iden- tity, and a single defect can wreak havoc. So if computers are to become much smaller in the future, new technology must replace or supplement what we now have. HYDROGEN ATOMS could be used to store bits of information in a quantum computer. An atom in its ground state, with its electron in its lowest possible en- ergy level (blue), can represent a 0; the same atom in an excited state, with its electron at a higher energy level (green), can repre- sent a 1. The atom’s bit, 0 or 1, can be flipped to the opposite value using a pulse of laser light (yellow). If the photons in the pulse have the same amount of energy as the difference between the electron’s ground state and its excited state, the electron will jump from one state to the other. -
The Story Behind the Science: Pendulum Motion
ehind t b h y e r s c o c Pendulum Motion t t i i e e s s n n The Value of Idealization in Science e e c c h h e e T T Galileo Galilei The pendulum is seemingly a very humble and simple changed cultures and societies through its impact on device. Today it is mostly seen as an oscillating weight on navigation. Accurate time measurement was long seen as old grandfather clocks or as a swinging weight on the end the solution to the problem of longitude determination of a string used in school physics experiments. But which had vexed European maritime nations in their surprisingly, despite its modest appearances, the efforts to sail beyond Europe's shores. Treasure fleets pendulum has played a significant role in the development from Latin America, trading ships from the Far East, and of Western science, culture and society. naval vessels were all getting lost and running out of food and water. Ships were running aground on reefs or into The significance of the pendulum to the development of cliffs instead of finding safe harbors. modern science was in its use for time keeping. The pendulum's initial Galileo-inspired utilization in clockwork Position on the Earth's surface is given by two provided the world's first accurate measure of time. The coordinates: latitude (how many degrees above or below accuracy of mechanical clocks went, in the space of a the equator the place is), and longitude (how many couple of decades in the early 17th century, from plus or degrees east or west of a given north-south meridian the minus half-an-hour per day to one second per day.