Optimizing Molecular Cloning of Multiple Plasmids Thierry Petit, Lolita Petit
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Restriction-Modification Gene Complexes As Selfish Gene Entities: Roles of a Regulatory System in Their Establishment, Maintenan
Proc. Natl. Acad. Sci. USA Vol. 95, pp. 6442–6447, May 1998 Microbiology Restriction-modification gene complexes as selfish gene entities: Roles of a regulatory system in their establishment, maintenance, and apoptotic mutual exclusion (programmed cell deathyepigeneticsyintragenomic conflictsyphage exclusionyplasmid) Y. NAKAYAMA AND I. KOBAYASHI* Department of Molecular Biology, Institute of Medical Science, University of Tokyo, Shirokanedai, Tokyo 108-8639, Japan Communicated by Allan Campbell, Stanford University, Stanford, CA, March 6, 1998 (received for review May 31, 1997) ABSTRACT We have reported some type II restriction- cell has lost its RM gene complex, its descendants will contain modification (RM) gene complexes on plasmids resist displace- fewer and fewer molecules of the modification enzyme. Eventu- ment by an incompatible plasmid through postsegregational host ally, their capacity to modify the many sites needed to protect the killing. Such selfish behavior may have contributed to the spread newly replicated chromosomes from the remaining pool of restric- and maintenance of RM systems. Here we analyze the role of tion enzyme may become inadequate. Chromosomal DNA will regulatory genes (C), often found linked to RM gene complexes, then be cleaved at the unmodified sites, and the cells will be killed in their interaction with the host and the other RM gene com- (refs. 2–4; N. Handa, A. Ichige, K. Kusano, and I.K., unpublished plexes. We identified the C gene of EcoRV as a positive regulator results). This result is similar to the postsegregational host killing of restriction. A C mutation eliminated postsegregational killing mechanisms for maintenance of several plasmids (5). These RM by EcoRV. -

Datasheet for Ecorv-HF™ (R3195; Lot 0051211)
Source: An E. coli strain that carries the cloned Diluent Compatibility: Diluent Buffer B Endonuclease Activity: Incubation of a 50 µl and modified (D19A, E27A) EcoRV gene from the 300 mM NaCl, 10 mM Tris-HCl, 0.1 mM EDTA, reaction containing 30 units of enzyme with 1 µg ™ plasmid J62 pLG74 (L.I. Glatman) 1 mM dithiothreitol, 500 µg/ml BSA and 50% glyc- of φX174 RF I DNA for 4 hours at 37°C resulted EcoRV-HF erol (pH 7.4 @ 25°C) in < 30% conversion to RFII as determined by Supplied in: 200 mM NaCl, 10 mM Tris-HCl agarose gel electrophoresis. 1-800-632-7799 (ph 7.4), 0.1 mM EDTA, 1 mM DTT, 200 µg/ml Quality Controls [email protected] BSA and 50% glycerol. Ligation: After 10-fold overdigestion with Blue/White Screening Assay: An appropriate www.neb.com α R3195S 005121114111 EcoRV- HF, > 95% of the DNA fragments can vector is digested at a unique site within the lacZ Reagents Supplied with Enzyme: be ligated with T4 DNA Ligase (at a 5´ termini gene with a 10-fold excess of enzyme. The vector 10X NEBuffer 4. concentration of 1–2 µM) at 16°C. Of these ligated DNA is then ligated, transformed, and plated onto R3195S fragments, > 95% can be recut with EcoRV-HF. Xgal/IPTG/Amp plates. Successful expression Reaction Conditions: 1X NEBuffer 4. of β-galactosidase is a function of how intact its 4,000 units 20,000 U/ml Lot: 0051211 Incubate at 37°C. 16-Hour Incubation: A 50 µl reaction containing gene remains after cloning, an intact gene gives 1 µg of DNA and 120 units of EcoRV-HF incubated rise to a blue colony, removal of even a single RECOMBINANT Store at –20°C Exp: 11/14 1X NEBuffer 4: for 16 hours at 37°C resulted in a DNA pattern free base gives rise to a white colony. -
Restriction Endonucleases
Restriction Endonucleases TECHNICAL GUIDE UPDATE 2017/18 be INSPIRED drive DISCOVERY stay GENUINE RESTRICTION ENZYMES FROM NEB Cut Smarter with Restriction Enzymes from NEB® Looking to bring CONVENIENCE to your workflow? Simplify Reaction Setup and Double Activity of DNA Modifying Enzymes in CutSmart Buffer: Digestion with CutSmart® Buffer Clone Smarter! Activity Enzyme Required Supplements Over 210 restriction enzymes are 100% active in a single buffer, in CutSmart Phosphatases: CutSmart Buffer, making it significantly easier to set up your Alkaline Phosphatase (CIP) + + + double digest reactions. Since CutSmart Buffer includes BSA, there Antarctic Phosphatase + + + Requires Zn2+ Quick CIP + + + are fewer tubes and pipetting steps to worry about. Additionally, Shrimp Alkaline Phosphatase (rSAP) + + + many DNA modifying enzymes are 100% active in CutSmart Ligases: T4 DNA Ligase + + + Requires ATP Buffer, eliminating the need for subsequent purification. E. coli DNA Ligase + + + Requires NAD T3 DNA Ligase + + + Requires ATP + PEG For more information, visit www.NEBCutSmart.com T7 DNA Ligase + + + Requires ATP + PEG Polymerases: T4 DNA Polymerase + + + DNA Polymerase I, Large (Klenow) Frag. + + + DNA Polymerase I + + + DNA Polymerase Klenow Exo– + + + Bst DNA Polymerase + + + ™ phi29 DNA Polymerase + + + Speed up Digestions with Time-Saver T7 DNA Polymerase (unmodified) + + + Qualified Restriction Enzymes Transferases/Kinases: T4 Polynucleotide Kinase + + + Requires ATP + DTT T4 PNK (3´ phosphatase minus) + + + Requires ATP + DTT > 190 of our restriction enzymes are able to digest DNA in CpG Methyltransferase (M. SssI) + + + 5–15 minutes, and can safely be used overnight with no loss of GpC Methyltransferase (M. CviPI) + Requires DTT T4 Phage β-glucosyltransferase + + + sample. For added convenience and flexibility, most of these are Nucleases, other: supplied with CutSmart Buffer. -
Site-Specific DNA Targeting: Genome Engineering Tools Andrew Kuznetsov Freiburg I.Br
Site-specific DNA targeting: genome engineering tools Andrew Kuznetsov Freiburg i.Br. 17.09.2015 The Department of Biophysics at the University of Sevastopol Content • Nucleases type II, IIS, meganucleases (EcoRV, FokI, I-SceI), mechanism of DNA cleavage • Artificial nucleases Waclaw Szybalski‘s idea, monopod design, bipod design • Advanced approaches Zinc fingers, TALEN, CRISPR/Cas9 • Applications regulation of transcription, epigenetic modification, site-specific recombination, multiplexing Types of restriction endonucleases I. (EC 3.1.21.3) cleave at sites remote from recognition site; require ATP and S-adenosyl-L-methionine to function; multifunctional proteins with restriction and methylase (EC 2.1.1.72) activities II. (EC 3.1.21.4) cleave within or at short specific distances from recognition site; most require magnesium; single function (restriction) III. (EC 3.1.21.5) cleave at a short distance from recognition site; require ATP (but do not hydrolyse it); S-adenosyl-L-methionine stimulates reaction but is not required; exist as part of a complex with a modification methylase (EC 2.1.1.72) IV. target modified DNA, e.g. methylated, hydroxymethylated and glucosyl- hydroxymethylated DNA V. utilize guide RNAs to target specific non-palindromic sequences found on invading DNA (e.g., the cas9-gRNA complex from CRISPRs) Features of the type II endonucleases > 3000 (600) http://rebase.neb.com Type II endonucleases recognize shot, usually palindromic, sequences of 4-8 bp Structures of restriction enzymes show a common core comprising 4 -

A Short History of the Restriction Enzymes Wil A
Published online 18 October 2013 Nucleic Acids Research, 2014, Vol. 42, No. 1 3–19 doi:10.1093/nar/gkt990 NAR Breakthrough Article SURVEY AND SUMMARY Highlights of the DNA cutters: a short history of the restriction enzymes Wil A. M. Loenen1,*, David T. F. Dryden2,*, Elisabeth A. Raleigh3,*, Geoffrey G. Wilson3,* and Noreen E. Murrayy 1Leiden University Medical Center, Leiden, the Netherlands, 2EaStChemSchool of Chemistry, University of Edinburgh, West Mains Road, Edinburgh EH9 3JJ, Scotland, UK and 3New England Biolabs, Inc., 240 County Road, Ipswich, MA 01938, USA Received August 14, 2013; Revised September 24, 2013; Accepted October 2, 2013 ABSTRACT Type II REases represent the largest group of characterized enzymes owing to their usefulness as tools for recombinant In the early 1950’s, ‘host-controlled variation in DNA technology, and they have been studied extensively. bacterial viruses’ was reported as a non-hereditary Over 300 Type II REases, with >200 different sequence- phenomenon: one cycle of viral growth on certain specificities, are commercially available. Far fewer Type I, bacterial hosts affected the ability of progeny virus III and IV enzymes have been characterized, but putative to grow on other hosts by either restricting or examples are being identified daily through bioinformatic enlarging their host range. Unlike mutation, this analysis of sequenced genomes (Table 1). change was reversible, and one cycle of growth in Here we present a non-specialists perspective on import- the previous host returned the virus to its original ant events in the discovery and understanding of REases. form. These simple observations heralded the dis- Studies of these enzymes have generated a wealth of covery of the endonuclease and methyltransferase information regarding DNA–protein interactions and catalysis, protein family relationships, control of restric- activities of what are now termed Type I, II, III and tion activity and plasticity of protein domains, as well IV DNA restriction-modification systems. -

Review Type II Restriction Endonucleases
CMLS, Cell. Mol. Life Sci. 62 (2005) 685–707 1420-682X/05/060685-23 DOI 10.1007/s00018-004-4513-1 CMLS Cellular and Molecular Life Sciences © Birkhäuser Verlag, Basel, 2005 Review Type II restriction endonucleases: structure and mechanism A. Pingouda,*, M. Fuxreiterb, V.Pingouda and W.Wendea a Institut für Biochemie, Justus-Liebig-Universität, Heinrich-Buff-Ring 58, 35392 Giessen (Germany), Fax: +49 641 9935409, e-mail: [email protected] b Institute of Enzymology, Biological Research Centre, Hungarian Academy of Sciences, Karolina ut 29, 1113 Budapest (Hungary) Received 15 November 2004; accepted 9 December 2004 Abstract. Type II restriction endonucleases are compo- few restriction endonucleases discovered thus far do not nents of restriction modification systems that protect belong to the PD…D/ExK family of enzymes, but rather bacteria and archaea against invading foreign DNA. Most have active sites typical of other endonuclease families. are homodimeric or tetrameric enzymes that cleave DNA The present review deals with new developments in the at defined sites of 4–8 bp in length and require Mg2+ ions field of Type II restriction endonucleases. One of the for catalysis. They differ in the details of the recognition more interesting aspects is the increasing awareness of process and the mode of cleavage, indicators that these the diversity of Type II restriction enzymes. Nevertheless, enzymes are more diverse than originally thought. Still, structural studies summarized herein deal with the more most of them have a similar structural core and seem to common subtypes. A major emphasis of this review will share a common mechanism of DNA cleavage, suggest- be on target site location and the mechanism of catalysis, ing that they evolved from a common ancestor. -

Heterogeneity in Molecular Recognition by Restriction
Proc. Natl. Acad. Sci. USA Vol. 92, pp. 3444-3448, April 1995 Biochemistry Heterogeneity in molecular recognition by restriction endonucleases: Osmotic and hydrostatic pressure effects on BamHI, Pvu II, and EcoRV specificity (protein-DNA recognition/star activity/bound water) CLIFFORD R. ROBINSONt AND STEPHEN G. SLIGARt School of Chemical Sciences and Beckman Institute for Advanced Science and Technology, University of Illinois at Urbana-Champaign, Urbana, IL 61801 Communicated by Jiri Jonas, University of Illinois, Urbana, IL, December 5, 1994 (received for review August 18, 1994) ABSTRACT The cleavage specificity of the Pvu II and and hydrostatic-pressure techniques to study the role of water BamHI restriction endonucleases is found to be dramatically in mediating site-specific interactions of the EcoRI endonu- reduced at elevated osmotic pressure. Relaxation in specificity clease with canonical and alternate DNA sequences (16, 18). of these otherwise highly accurate and specific enzymes, To investigate whether this nontraditional role for water that previously termed "star activity," is uniquely correlated with was discovered in EcoRI represents a common feature of osmotic pressure between 0 and 100 atmospheres. No other restriction enzyme systems, we have examined the Pvu II, colligative solvent property exhibits a uniform correlation BamHI, and EcoRV endonucleases. Along with EcoRI, they with star activity for all of the compounds tested. Application are the only members of the type II restriction endonuclease of hydrostatic pressure counteracts the effects of osmotic family to be characterized by high-resolution structural anal- pressure and restores the natural selectivity ofthe enzymes for ysis (4, 19-23). For these three enzymes, cleavage at alternate their canonical recognition sequences. -

Substrate-Assisted Catalysis in the Cleavage of DNA by the Ecori and Ecorv Restriction Enzymes
Proc. Natl. Acad. Sci. USA Vol. 90, pp. 8499-8503, September 1993 Biochemistry Substrate-assisted catalysis in the cleavage of DNA by the EcoRI and EcoRV restriction enzymes (acid base catalysis/mechanism of deavage/nuclease/chemicafly modiffed oligodeoxynucleotide/H-phosphonate) ALBERT JELTSCH, JURGEN ALVES, HEINER WOLFES, GUNTER MAASS, AND ALFRED PINGOUD* Zentrum Biochemie, Medizinische Hochschule Hannover, Konstanty-Gutschow-Strasse 8, 30623 Hannover, Germany Communicated by Thomas R. Cech, June 14, 1993 ABSTRACT The crystal structure analyses of the EcoRI- stereochemistry of their catalysis make it likely that these DNA and EcoRV-DNA complexes do not provide clear sug- enzymes cleave DNA by a similar mechanism that involves gestions as to which amino acid residues are responsible for the an attack of an activated water molecule in-line with the activation of water to carry out the DNA cleavage. Based on leaving 03' group. Recently, we published (11) a detailed molecular modeling, we have proposed recently that the at- proposal for the mechanism of DNA cleavage by EcoRI and tacking water molecule is activated by the negatively charged EcoRV based on structural data (Brookhaven data bank pro-Rp phosphoryl oxygen of the phosphate group 3' to the entries: 1RlE, 3RVE), molecular modeling, and results of scissile phosphodiester bond. We now present experimental site-directed mutagenesis experiments (ref. 12 and references evidence to support this proposal. (0) Oligodeoxynucleotide therein): Asp-91 and Glu-111 in EcoRI, Asp-74 and Asp-90 in substrates lacking this phosphate group in one strand are EcoRV, and the phosphate at which cleavage occurs were cleaved only in the other strand. -
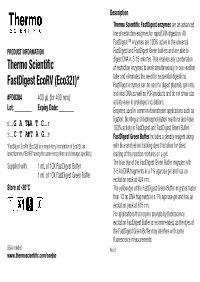
Fastdigest Ecorv (Eco32i)* Fastdigest Enzymes Can Be Used to Digest Plasmid, Genomic
Description Thermo Scientific FastDigest enzymes are an advanced line of restriction enzymes for rapid DNA digestion. All FastDigest™ enzymes are 100% active in the universal PRODUCT INFORMATION FastDigest and FastDigest Green buffers and are able to digest DNA in 5-15 minutes. This enables any combination Thermo Scientific of restriction enzymes to work simultaneously in one reaction tube and eliminates the need for sequential digestions. FastDigest EcoRV (Eco32I)* FastDigest enzymes can be used to digest plasmid, genomic #FD0304 400 µL (for 400 rxns) and viral DNA as well as PCR products and do not show star activity even in prolonged incubations. Lot: ________ Expiry Date: _______ Enzymes used in common downstream applications such as ligation, blunting and dephosphorylation reactions also have 5'...G A TA T C...3' 100% activity in FastDigest and FastDigest Green Buffer. 3'...C T A T A G...5' FastDigest Green Buffer includes a density reagent along *FastDigest EcoRV (Eco32I) is a proprietary formulation of Eco32I, an with blue and yellow tracking dyes that allow for direct isoschizomer of EcoRV having the same recognition and cleavage specificity. loading of the reaction mixtures on a gel. Supplied with: 1 mL of 10X FastDigest Buffer The blue dye of the FastDigest Green Buffer migrates with 3-5 kb DNA fragments in a 1% agarose gel and has an 1 mL of 10X FastDigest Green Buffer excitation peak at 424 nm. Store at -20°C The yellow dye of the FastDigest Green Buffer migrates faster than 10 bp DNA fragments in a 1% agarose gel and has an excitation peak at 615 nm. -

Type II Restriction Endonucleases : a Historical Perspective and More
Published online 30 May 2014 Nucleic Acids Research, 2014, Vol. 42, No. 12 7489–7527 doi: 10.1093/nar/gku447 SURVEY AND SUMMARY Type II restriction endonucleases––a historical perspective and more Alfred Pingoud1,*,†, Geoffrey G. Wilson2,† and Wolfgang Wende1 1Institute of Biochemistry, Justus-Liebig-University Giessen, Heinrich-Buff-Ring 58, D-35392 Giessen, Germany and 2New England Biolabs Inc., 240 County Road, Ipswich, MA 01938-2723, USA Downloaded from Received January 7, 2014; Revised May 02, 2014; Accepted May 7, 2014 ABSTRACT combat viral infections, these enzymes allow unmanageable http://nar.oxfordjournals.org/ tangles of macromolecular DNA to be transformed with This article continues the series of Surveys and Sum- unsurpassable accuracy into convenient, gene-sized pieces, maries on restriction endonucleases (REases) begun a necessary first step for characterizing genomes, sequenc- this year in Nucleic Acids Research.Herewedis- ing genes, and assembling DNA into novel genetic arrange- cuss ‘Type II’ REases, the kind used for DNA anal- ments. It seems unlikely that today’s Biomedical Sciences ysis and cloning. We focus on their biochemistry: and the Biotechnology industry would have developed with- what they are, what they do, and how they do it. Type out Type II restriction enzymes, and certainly not at the II REases are produced by prokaryotes to combat startling pace we have witnessed since their discovery only at Bibliothekssystem der Universitaet Giessen on February 10, 2015 bacteriophages. With extreme accuracy, each recog- a few decades ago. nizes a particular sequence in double-stranded DNA and cleaves at a fixed position within or nearby. The INTRODUCTION discoveries of these enzymes in the 1970s, and of the uses to which they could be put, have since im- Several reviews of restriction endonucleases (REases) have pacted every corner of the life sciences. -
Molecular Cloning
Now includes Recombinant Albumin Buffers Molecular Cloning TECHNICAL GUIDE be INSPIRED drive DISCOVERY stay GENUINE OVERVIEW TABLE OF CONTENTS 3 Online Tools 4–5 Cloning Workflow Comparison 6 DNA Assembly Molecular Cloning Overview 6 Overview Molecular cloning refers to the process by which recombinant DNA molecules are 6 Product Selection produced and transformed into a host organism, where they are replicated. A molecular 7 Golden Gate Assembly Kits cloning reaction is usually comprised of two components: 7 Optimization Tips 8 Technical Tips for Optimizing 1. The DNA fragment of interest to be replicated. Golden Gate Assembly Reactions 2. A vector/plasmid backbone that contains all the components for replication in the host. 9 NEBuilder® HiFi DNA Assembly 10 Protocol/Optimization Tips ® DNA of interest, such as a gene, regulatory element(s), operon, etc., is prepared for cloning 10 Gibson Assembly by either excising it out of the source DNA using restriction enzymes, copying it using 11 Cloning & Mutagenesis PCR, or assembling it from individual oligonucleotides. At the same time, a plasmid vector 11 NEB PCR Cloning Kit is prepared in a linear form using restriction enzymes (REs) or Polymerase Chain Reaction 12 Q5® Site-Directed Mutagenesis Kit (PCR). The plasmid is a small, circular piece of DNA that is replicated within the host and 12 Protocols/Optimization Tips exists separately from the host’s chromosomal or genomic DNA. By physically joining the 13–24 DNA Preparation DNA of interest to the plasmid vector through phosphodiester bonds, the DNA of interest 13 Nucleic Acid Purification becomes part of the new recombinant plasmid and is replicated by the host. -

On the Possibilities and Limitations of Rational Protein Design to Expand the Specificity of Restriction Enzymes: a Case Study Employing Ecorv As the Target
Protein Engineering vol.13 no.4 pp.275–281, 2000 On the possibilities and limitations of rational protein design to expand the specificity of restriction enzymes: a case study employing EcoRV as the target Thomas Lanio, Albert Jeltsch and Alfred Pingoud1 a 6 base pair (bp) recognition site (Roberts and Macelis, 1999). The biological function of restriction enzymes is to cleave Institut fu¨r Biochemie, FB 08, Justus-Liebig-Universita¨t, Heinrich-Buff-Ring phage DNA invading a bacterium and thereby to protect the 58, D-35392 Giessen, Germany. bacterial cell from infection. As palindromic sites compris- 1To whom correspondence should be addressed ing 8 bp statistically occur only every 65 536 bp and phage E-mail: [email protected] genomes usually are short (104–105 bp), a restriction enzyme The restriction endonuclease EcoRV has been characterized with an 8 or even 10 bp recognition site could not fulfil this in structural and functional terms in great detail. Based role efficiently. Restriction endonucleases having a recognition on this detailed information we employed a structure- sequence of ജ8 bp, therefore, in general do not provide a guided approach to engineer variants of EcoRV that should selective advantage for the bacterial host and in consequence be able to discriminate between differently flanked EcoRV to date only 3.5% of all possible 8 bp cutters are available recognition sites. In crystal structures of EcoRV complexed from natural sources (Roberts and Macelis, 1999) and most with d(CGGGATATCCC)2 and d(AAAGATATCTT)2, likely not many more will be found by screening bacterial Lys104 and Ala181 closely approach the two base pairs strains.