A Review and Modern Approach to LC Ladder Synthesis
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Active Control of Loudspeakers: an Investigation of Practical Applications
Downloaded from orbit.dtu.dk on: Dec 18, 2017 Active control of loudspeakers: An investigation of practical applications Bright, Andrew Paddock; Jacobsen, Finn; Polack, Jean-Dominique; Rasmussen, Karsten Bo Publication date: 2002 Document Version Early version, also known as pre-print Link back to DTU Orbit Citation (APA): Bright, A. P., Jacobsen, F., Polack, J-D., & Rasmussen, K. B. (2002). Active control of loudspeakers: An investigation of practical applications. General rights Copyright and moral rights for the publications made accessible in the public portal are retained by the authors and/or other copyright owners and it is a condition of accessing publications that users recognise and abide by the legal requirements associated with these rights. • Users may download and print one copy of any publication from the public portal for the purpose of private study or research. • You may not further distribute the material or use it for any profit-making activity or commercial gain • You may freely distribute the URL identifying the publication in the public portal If you believe that this document breaches copyright please contact us providing details, and we will remove access to the work immediately and investigate your claim. Active Control of Loudspeakers: An Investigation of Practical Applications Andrew Bright Ørsted·DTU – Acoustic Technology Technical University of Denmark Published by: Ørsted·DTU, Acoustic Technology, Technical University of Denmark, Building 352, DK-2800 Kgs. Lyngby, Denmark, 2002 3 This work is dedicated to the memory of Betty Taliaferro Lawton Paddock Hunt (1916-1999) and to Samuel Raymond Bright, Jr. (1936-2001) 4 5 Table of Contents Preface 9 Summary 11 Resumé 13 Conventions, notation, and abbreviations 15 Conventions...................................................................................................................................... -

Theory and Techniques of Network Sensitivity Applied to Electrical Device Modelling and Circuit Design
r THEORY AND TECHNIQUES OF NETWORK SENSITIVITY APPLIED TO ELECTRICAL DEVICE MODELLING AND CIRCUIT DESIGN • A thesis submitted for the degree of Doctor of Philosophy, in the Faculty of Engineering, University of London by Pedro Antonio Villalaz Communications Section, Department of Electrical Engineering Imperial College of Science and Technology, University of London September 1972 SUMMARY Chapter 1 is meant to provide a review of modelling as used in computer aided circuit design. Different types of model are distinguished according to their form or their application, and different levels of modelling are compared. Finally a scheme is described whereby models are considered as both isolated objects, and as objects embedded in their circuit environment. Chapter 2 deals with the optimization of linear equivalent circuit models. After some general considerations on the nature of the field of optimization, providing a limited survey, one particular optimization algorithm, the 'steepest descent method' is explained. A computer program has been written (in Fortran IV), using this method in an iterative process which allows to optimize the element values as well as (within certain limits) the topology of the models. Two different methods for the computation of the gradi- ent, which are employed in the program, are discussed in connection with their application. To terminate Chapter 2 some further details relevant to the optimization procedure are pointed out, and some computed examples illustrate the performance of the program. The next chapter can be regarded as a preparation for Chapters 4 and 5. An efficient method for the computation of large, change network sensitivity is described. A change in a network or equivalent circuit model element is simulated by means of an addi- tional current source introduced across that element. -

Lecture 3: Transfer Function and Dynamic Response Analysis
Transfer function approach Dynamic response Summary Basics of Automation and Control I Lecture 3: Transfer function and dynamic response analysis Paweł Malczyk Division of Theory of Machines and Robots Institute of Aeronautics and Applied Mechanics Faculty of Power and Aeronautical Engineering Warsaw University of Technology October 17, 2019 © Paweł Malczyk. Basics of Automation and Control I Lecture 3: Transfer function and dynamic response analysis 1 / 31 Transfer function approach Dynamic response Summary Outline 1 Transfer function approach 2 Dynamic response 3 Summary © Paweł Malczyk. Basics of Automation and Control I Lecture 3: Transfer function and dynamic response analysis 2 / 31 Transfer function approach Dynamic response Summary Transfer function approach 1 Transfer function approach SISO system Definition Poles and zeros Transfer function for multivariable system Properties 2 Dynamic response 3 Summary © Paweł Malczyk. Basics of Automation and Control I Lecture 3: Transfer function and dynamic response analysis 3 / 31 Transfer function approach Dynamic response Summary SISO system Fig. 1: Block diagram of a single input single output (SISO) system Consider the continuous, linear time-invariant (LTI) system defined by linear constant coefficient ordinary differential equation (LCCODE): dny dn−1y + − + ··· + _ + = an n an 1 n−1 a1y a0y dt dt (1) dmu dm−1u = b + b − + ··· + b u_ + b u m dtm m 1 dtm−1 1 0 initial conditions y(0), y_(0),..., y(n−1)(0), and u(0),..., u(m−1)(0) given, u(t) – input signal, y(t) – output signal, ai – real constants for i = 1, ··· , n, and bj – real constants for j = 1, ··· , m. How do I find the LCCODE (1)? . -
Simple Simple Digital Filter Design for Analogue Engineers
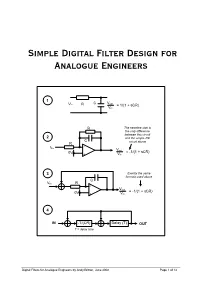
Simple Digital Filter Design for Analogue Engineers 1 C Vout Vin R = 1/(1 + sCR) Vin R The negative sign is the only difference between this circuit 2 and the simple RC C R circuit above - Vin Vout 0V = -1/(1 + sCR) + Vin 3 Exactly the same formula used above C Vin R - Vout 0V = -1/(1 + sCR) + Vin 4 IN -T/(CR) Delay (T) OUT T = delay time Digital Filters for Analogue Engineers by Andy Britton, June 2008 Page 1 of 14 Introduction If I’d read this document years ago it would have saved me countless hours of agony and confusion understanding what should be conceptually very simple. My biggest discontent with topical literature is that they never cleanly relate digital filters to “real world” analogue filters. This article/document sets out to: - • Describe the function of a very basic RC low pass analogue filter • Convert this filter to an analogue circuit that is digitally realizable • Explain how analogue functions are converted to digital functions • Develop a basic 1st order digital low-pass filter • Develop a 2nd order filter with independent Q and frequency control parameters • Show how digital filters can be proven/designed using a spreadsheet such as excel • Demonstrate digital filters by showing excel graphs of signals • Explain the limitations of use of digital filters i.e. when they become unstable • Show how these filters fit in to the general theory (yawn!) Before the end of this article you should hopefully find something useful to guide you on future designs and allow you to successfully implement a digital filter. -

Simulating the Directivity Behavior of Loudspeakers with Crossover Filters
Audio Engineering Society Convention Paper Presented at the 123rd Convention 2007 October 5–8 New York, NY, USA The papers at this Convention have been selected on the basis of a submitted abstract and extended precis that have been peer reviewed by at least two qualified anonymous reviewers. This convention paper has been reproduced from the author's advance manuscript, without editing, corrections, or consideration by the Review Board. The AES takes no responsibility for the contents. Additional papers may be obtained by sending request and remittance to Audio Engineering Society, 60 East 42nd Street, New York, New York 10165-2520, USA; also see www.aes.org. All rights reserved. Reproduction of this paper, or any portion thereof, is not permitted without direct permission from the Journal of the Audio Engineering Society. Simulating the Directivity Behavior of Loudspeakers with Crossover Filters Stefan Feistel1, Wolfgang Ahnert2, and Charles Hughes3, and Bruce Olson4 1 Ahnert Feistel Media Group, Arkonastr.45-49, 13189 Berlin, Germany [email protected] 2 Ahnert Feistel Media Group, Arkonastr.45-49, 13189 Berlin, Germany [email protected] 3 Excelsior Audio Design & Services, LLC, Gastonia, NC, USA [email protected] 4 Olson Sound Design, Brooklyn Park, MN, USA [email protected] ABSTRACT In previous publications the description of loudspeakers was introduced based on high-resolution data, comprising most importantly of complex directivity data for individual drivers as well as of crossover filters. In this work it is presented how this concept can be exploited to predict the directivity balloon of multi-way loudspeakers depending on the chosen crossover filters. -

Control Theory
Control theory S. Simrock DESY, Hamburg, Germany Abstract In engineering and mathematics, control theory deals with the behaviour of dynamical systems. The desired output of a system is called the reference. When one or more output variables of a system need to follow a certain ref- erence over time, a controller manipulates the inputs to a system to obtain the desired effect on the output of the system. Rapid advances in digital system technology have radically altered the control design options. It has become routinely practicable to design very complicated digital controllers and to carry out the extensive calculations required for their design. These advances in im- plementation and design capability can be obtained at low cost because of the widespread availability of inexpensive and powerful digital processing plat- forms and high-speed analog IO devices. 1 Introduction The emphasis of this tutorial on control theory is on the design of digital controls to achieve good dy- namic response and small errors while using signals that are sampled in time and quantized in amplitude. Both transform (classical control) and state-space (modern control) methods are described and applied to illustrative examples. The transform methods emphasized are the root-locus method of Evans and fre- quency response. The state-space methods developed are the technique of pole assignment augmented by an estimator (observer) and optimal quadratic-loss control. The optimal control problems use the steady-state constant gain solution. Other topics covered are system identification and non-linear control. System identification is a general term to describe mathematical tools and algorithms that build dynamical models from measured data. -

Step Response of Series RLC Circuit ‐ Output Taken Across Capacitor
ESE 271 / Spring 2013 / Lecture 23 Step response of series RLC circuit ‐ output taken across capacitor. What happens during transient period from initial steady state to final steady state? 1 ESE 271 / Spring 2013 / Lecture 23 Transfer function of series RLC ‐ output taken across capacitor. Poles: Case 1: ‐‐two differen t real poles Case 2: ‐ two identical real poles ‐ complex conjugate poles Case 3: 2 ESE 271 / Spring 2013 / Lecture 23 Case 1: two different real poles. Step response of series RLC ‐ output taken across capacitor. Overdamped case –the circuit demonstrates relatively slow transient response. 3 ESE 271 / Spring 2013 / Lecture 23 Case 1: two different real poles. Freqqyuency response of series RLC ‐ output taken across capacitor. Uncorrected Bode Gain Plot Overdamped case –the circuit demonstrates relatively limited bandwidth 4 ESE 271 / Spring 2013 / Lecture 23 Case 2: two identical real poles. Step response of series RLC ‐ output taken across capacitor. Critically damped case –the circuit demonstrates the shortest possible rise time without overshoot. 5 ESE 271 / Spring 2013 / Lecture 23 Case 2: two identical real poles. Freqqyuency response of series RLC ‐ output taken across capacitor. Critically damped case –the circuit demonstrates the widest bandwidth without apparent resonance. Uncorrected Bode Gain Plot 6 ESE 271 / Spring 2013 / Lecture 23 Case 3: two complex poles. Step response of series RLC ‐ output taken across capacitor. Underdamped case – the circuit oscillates. 7 ESE 271 / Spring 2013 / Lecture 23 Case 3: two complex poles. Freqqyuency response of series RLC ‐ output taken across capacitor. Corrected Bode GiGain Plot Underdamped case –the circuit can demonstrate apparent resonant behavior. -

Framsida Msc Thesis Viktor Gunnarsson
Assessment of Nonlinearities in Loudspeakers Volume dependent equalization Master’s Thesis in the Master’s programme in Sound and Vibration VIKTOR GUNNARSSON Department of Civil and Environmental Engineering Division of Applied Acoustics Chalmers Room Acoustics Group CHALMERS UNIVERSITY OF TECHNOLOGY Göteborg, Sweden 2010 Master’s Thesis 2010:27 MASTER’S THESIS 2010:27 Assessment of Nonlinearities in Loudspeakers Volume dependent equalization VIKTOR GUNNARSSON Department of Civil and Environmental Engineering Division of Applied Acoustics Roomacoustics Group CHALMERS UNIVERSITY OF TECHNOLOGY Goteborg,¨ Sweden 2010 CHALMERS, Master’s Thesis 2010:27 ii Assessment of Nonlinearities in Loudspeakers Volume dependent equalization © VIKTOR GUNNARSSON, 2010 Master’s Thesis 2010:27 Department of Civil and Environmental Engineering Division of Applied Acoustics Roomacoustics Group Chalmers University of Technology SE-41296 Goteborg¨ Sweden Tel. +46-(0)31 772 1000 Reproservice / Department of Civil and Environmental Engineering Goteborg,¨ Sweden 2010 Assessment of Nonlinearities in Loudspeakers Volume dependent equalization Master’s Thesis in the Master’s programme in Sound and Vibration VIKTOR GUNNARSSON Department of Civil and Environmental Engineering Division of Applied Acoustics Roomacoustics Group Chalmers University of Technology Abstract Digital room correction of loudspeakers has become popular over the latest years, yield- ing great gains in sound quality in applications ranging from home cinemas and cars to audiophile HiFi-systems. However, -

Frequency Response and Bode Plots
1 Frequency Response and Bode Plots 1.1 Preliminaries The steady-state sinusoidal frequency-response of a circuit is described by the phasor transfer function Hj( ) . A Bode plot is a graph of the magnitude (in dB) or phase of the transfer function versus frequency. Of course we can easily program the transfer function into a computer to make such plots, and for very complicated transfer functions this may be our only recourse. But in many cases the key features of the plot can be quickly sketched by hand using some simple rules that identify the impact of the poles and zeroes in shaping the frequency response. The advantage of this approach is the insight it provides on how the circuit elements influence the frequency response. This is especially important in the design of frequency-selective circuits. We will first consider how to generate Bode plots for simple poles, and then discuss how to handle the general second-order response. Before doing this, however, it may be helpful to review some properties of transfer functions, the decibel scale, and properties of the log function. Poles, Zeroes, and Stability The s-domain transfer function is always a rational polynomial function of the form Ns() smm as12 a s m asa Hs() K K mm12 10 (1.1) nn12 n Ds() s bsnn12 b s bsb 10 As we have seen already, the polynomials in the numerator and denominator are factored to find the poles and zeroes; these are the values of s that make the numerator or denominator zero. If we write the zeroes as zz123,, zetc., and similarly write the poles as pp123,, p , then Hs( ) can be written in factored form as ()()()s zsz sz Hs() K 12 m (1.2) ()()()s psp12 sp n 1 © Bob York 2009 2 Frequency Response and Bode Plots The pole and zero locations can be real or complex. -

Synthesis of Multiterminal RC Networks with the Aid of a Matrix
SNTHES IS OF MULT ITER? INAL R C ETWO RKS WITH TIIF OF A I'.'ATRIX TRANSFOiATIO by 1-CHENG CHAG A THESIS submitted to OREGO STATF COLLEOEt in partial fulfillment of the requirements for the degree of !1ASTER OF SCIENCE Jurie 1961 APPROVED: Redacted for privacy Associate Professor of' Electrical Erigineerthg In Charge of Major Re6acted for privacy Head of the Department of Electrical Engineering Redacted for privacy Chairman of School Graduate Committee / Redacted for_privacy________ Dean of Graduate School Date thesis is presented August 9, 1960 Tyred by J nette Crane A CKNOWLEDGMENT This the3ls was accomplished under the supervision cf Associate professor, Hendrick Oorthuys. The author wishos to exnress his heartfelt thanks to Professor )orthuys for his ardent help and constant encourap;oment. TABL1 OF CONTENTS page Introductior , . i E. A &eneral ranfrnat1on Theory for Network Synthesis . 3 II. Synthesis of Multitermin.. al RC etworks from a rescribec Oren- Circuit Iì'ipedance atrix . 9 A. Open-Circuit Impedance latrix . 10 B. Node-Admittance 1atries . 11 C, Synthesis Procedure ....... 16 III. RC Ladder Synthesis . 23 Iv. Conclusion ....... 32 V. ii11io;raphy ...... * . 35 Apoendices ....... 37 LIST OF FIGURES Fig. Page 1. fetwork ytheszing Zm(s). Eq. (2.13) . 22 2 Alternato Realization of Z,"'). 22 Eq. (2.13) .......... ietwor1?. , A Ladder ........ 31 4. RC Ladder Realization of Z(s). r' L) .Lq. \*)...J.......... s s . s s S1TTHES I S OF ULT ITERM INAL R C NETWORKS WITH THE AID OF A MATRIX TRANSFOMATIO11 L'TRODUCT ION in the synthesis of passive networks, one of the most Imoortant problems is to determine realizability concU- tions. -

Classic Filters There Are 4 Classic Analogue Filter Types: Butterworth, Chebyshev, Elliptic and Bessel. There Is No Ideal Filter
Classic Filters There are 4 classic analogue filter types: Butterworth, Chebyshev, Elliptic and Bessel. There is no ideal filter; each filter is good in some areas but poor in others. • Butterworth: Flattest pass-band but a poor roll-off rate. • Chebyshev: Some pass-band ripple but a better (steeper) roll-off rate. • Elliptic: Some pass- and stop-band ripple but with the steepest roll-off rate. • Bessel: Worst roll-off rate of all four filters but the best phase response. Filters with a poor phase response will react poorly to a change in signal level. Butterworth The first, and probably best-known filter approximation is the Butterworth or maximally-flat response. It exhibits a nearly flat passband with no ripple. The rolloff is smooth and monotonic, with a low-pass or high- pass rolloff rate of 20 dB/decade (6 dB/octave) for every pole. Thus, a 5th-order Butterworth low-pass filter would have an attenuation rate of 100 dB for every factor of ten increase in frequency beyond the cutoff frequency. It has a reasonably good phase response. Figure 1 Butterworth Filter Chebyshev The Chebyshev response is a mathematical strategy for achieving a faster roll-off by allowing ripple in the frequency response. As the ripple increases (bad), the roll-off becomes sharper (good). The Chebyshev response is an optimal trade-off between these two parameters. Chebyshev filters where the ripple is only allowed in the passband are called type 1 filters. Chebyshev filters that have ripple only in the stopband are called type 2 filters , but are are seldom used. -

Linear Time Invariant Systems
UNIT III LINEAR TIME INVARIANT CONTINUOUS TIME SYSTEMS CT systems – Linear Time invariant Systems – Basic properties of continuous time systems – Linearity, Causality, Time invariance, Stability – Frequency response of LTI systems – Analysis and characterization of LTI systems using Laplace transform – Computation of impulse response and transfer function using Laplace transform – Differential equation – Impulse response – Convolution integral and Frequency response. System A system may be defined as a set of elements or functional blocks which are connected together and produces an output in response to an input signal. The response or output of the system depends upon transfer function of the system. Mathematically, the functional relationship between input and output may be written as y(t)=f[x(t)] Types of system Like signals, systems may also be of two types as under: 1. Continuous-time system 2. Discrete time system Continuous time System Continuous time system may be defined as those systems in which the associated signals are also continuous. This means that input and output of continuous – time system are both continuous time signals. For example: Audio, video amplifiers, power supplies etc., are continuous time systems. Discrete time systems Discrete time system may be defined as a system in which the associated signals are also discrete time signals. This means that in a discrete time system, the input and output are both discrete time signals. For example, microprocessors, semiconductor memories, shift registers etc., are discrete time signals. LTI system:- Systems are broadly classified as continuous time systems and discrete time systems. Continuous time systems deal with continuous time signals and discrete time systems deal with discrete time system.