Assistive Multi-Purpose Mobility Device with Folding Temporary Seat
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Tips for Communicating with People with Disabilities
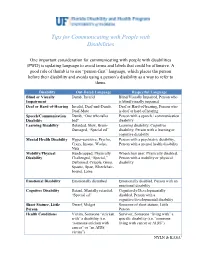
Tips for Communicating with People with Disabilities One important consideration for communicating with people with disabilities (PWD) is updating language to avoid terms and labels that could be offensive. A good rule of thumb is to use “person-first” language, which places the person before their disability and avoids using a person’s disability as a way to refer to them. Disability Out-Dated Language Respectful Language Blind or Visually Dumb, Invalid Blind/Visually Impaired, Person who Impairment is blind/visually impaired Deaf or Hard-of-Hearing Invalid, Deaf-and-Dumb, Deaf or Hard-of-hearing, Person who Deaf-Mute is deaf or hard of hearing Speech/Communication Dumb, “One who talks Person with a speech / communication Disability bad" disability Learning Disability Retarded, Slow, Brain- Learning disability, Cognitive Damaged, “Special ed” disability, Person with a learning or cognitive disability Mental Health Disability Hyper-sensitive, Psycho, Person with a psychiatric disability, Crazy, Insane, Wacko, Person with a mental health disability Nuts Mobility/Physical Handicapped, Physically Wheelchair user, Physically disabled, Disability Challenged, “Special,” Person with a mobility or physical Deformed, Cripple, Gimp, disability Spastic, Spaz, Wheelchair- bound, Lame Emotional Disability Emotionally disturbed Emotionally disabled, Person with an emotional disability Cognitive Disability Retard, Mentally retarded, Cognitively/Developmentally “Special ed” disabled, Person with a cognitive/developmental disability Short Stature, Little Dwarf, Midget Someone of short stature, Little Person Person Health Conditions Victim, Someone “stricken Survivor, Someone “living with” a with” a disability (i.e. specific disability (i.e. “someone “someone stricken with living with cancer or AIDS”) cancer” or “an AIDS victim”) NYLN & KASA1 General Tips Use a normal volume and tone when speaking to persons with disabilities. -

The Effect of Contingent Music with Physical Therapy in Children Who Toe- Walk Penny Roberts
Florida State University Libraries Electronic Theses, Treatises and Dissertations The Graduate School 2002 The Effect of Contingent Music with Physical Therapy in Children Who Toe- Walk Penny Roberts Follow this and additional works at the FSU Digital Library. For more information, please contact [email protected] THE FLORIDA STATE UNIVERSITY COLLEGE OF MUSIC THE EFFECT OF CONTINGENT MUSIC WITH PHYSICAL THERAPY IN CHILDREN WHO TOE-WALK By PENNY ROBERTS A Thesis submitted to the School of Music in partial fulfillment of the Requirements for the degree of Master of Music Degree Awarded: Fall Semester, 2002 The members of the Committee approve the thesis of Penny Roberts defended on November 8, 2002. ________________________ Jayne M. Standley Professor Directing Thesis ________________________ Clifford K. Madsen Committee Member ________________________ Diane Gregory Committee Member ACKNOWLEDGEMENTS I greatly appreciate Dr. Jayne Standley for her advice, patience, and gentle prodding during this experience. I sincerely thank the Physical Therapists who allowed me access to their patients, and patiently answered my many questions: E.A., V. C., M. M., S. M., & C. S. Thank you also to the facilities for your cooperation. Thank you to those friends who listened to thesis talk almost every day. You know who you are. Many thanks to Kate & Scott for their superior accommodations, computer assistance, and general support. I very much appreciate Claudine Boussicaut’s time. Most importantly, thank you to Zac, who now knows more about toe-walking and -

Vehicle Acquisition
VEHICLE ACQUISITION F ederal Transit Administration Americans with Disabilities Act Circular C 4710.1 Draft Chapter for Public Comment October 2012 TABLE OF CONTENTS 1 INTRODUCTION 1 1.1 THE DOT ADA REGULATIONS 1 1.2 PROVIDING SERVICE ON BEHALF OF ANOTHER ENTITY: “STAND IN THE SHOES” 1 2 ACQUISITION REQUIREMENTS FOR PUBLIC ENTITIES 3 2.1 BUSES AND VANS 4 2.2 RAPID RAIL AND LIGHT RAIL 5 2.3 COMMUTER RAIL 6 2.4 OTHER CONSIDERATIONS 7 2.5 DEMAND RESPONSIVE SERVICE 8 3 THE MAIN ELEMENTS OF ACCESSIBLE VEHICLES 10 3.1 BUSES AND VANS 13 3.2 RAPID RAIL VEHICLES 17 3.3 LIGHT RAIL VEHICLES 18 3.4 COMMUTER RAIL CARS 21 3.5 OTHER CONSIDERATIONS 23 4 ENSURING THAT VEHICLES ARE COMPLIANT 24 4.1 UNDERSTANDING THE SPECIFICATIONS 24 4.2 OBTAINING PUBLIC INPUT 24 4.3 ADDITIONAL SPECIFICATIONS 25 4.4 INSPECTIONS 25 5 DEFINITIONS 26 6 AUTHORITIES 28 7 REFERENCES 29 APPENDICES APPENDIX 1 SAMPLE BUS AND VAN SPECIFICATION CHECKLIST !"#$#%#$&'()*+,($$ -./')+.$#)0*'1'2'34$&/,52.($6$%(,72$ 8)239.($:;<:$ =,>.$<$37$:? ! 1 INTRODUCTION This Circular chapter on vehicle acquisition serves as a reference document for public transportation providers acquiring vehicles to ensure that these vehicles meet the requirements of the U.S. Department of Transportation (DOT) Americans with Disabilities Act (ADA) regulations. It is the goal of the Federal Transit Administration (FTA) to help transportation providers meet their obligations under the ADA by outlining the regulations, describing effective practices, and presenting the information in an easy-to-use format. Please note that this Circular does not alter, amend, or otherwise affect the DOT ADA regulations themselves; transportation providers are advised to use this Circular in addition to (not in lieu of) the DOT ADA regulations. -

Battery Powered Wheelchair and Mobility Aid Guidance Document
Battery Powered Wheelchair and SafetyMobility requirements applicableAid toGuidance the carriage of battery powered Document wheelchairs and mobility aids when carried by passengers travelling by air Based on the 2019 Regulation compliance with the IATA Dangerous Goods Introduction Regulations. This document is based on the provisions set out in Passengers may only travel with a battery-powered the 2019-2020 Edition of the International Civil mobility aid with the airline’s approval. Proper pre- Aviation Organization (ICAO) Technical Instruction notification by the user helps to ensure that: for the Safe Transport of Dangerous Goods by Air (Technical Instructions) and the 60th Edition of the ▪ all in the transportation chain know what IATA Dangerous Goods Regulations (DGR). device(s) and battery type(s) they are transporting; Information on the DGR can be found here: ▪ how to properly load and handle them; and https://www.iata.org/publications/dgr/Pages/index. ▪ what to do if an incident or accident occurs aspx either in-flight or on the ground. The batteries that power wheelchairs and mobility The pilot-in-command must be informed of the aids are considered dangerous goods when carried location of the mobility aid with installed batteries, by air. These and some other dangerous goods that removed batteries and spare batteries, to best deal are permitted for carriage by passengers can be with any emergencies that may occur. transported safely by air provided certain safety requirements are met. The requirements are Inadvertent operation of battery powered mobility detailed in the IATA Dangerous Goods Regulations, aids can cause friction or electrical load which which are based on the ICAO Technical could lead to a fire. -
2017 Ada Update on Service Animal Rules
2017 ADA UPDATE ON SERVICE ANIMAL RULES The California Hotel & Lodging Association receives many questions regarding the rights and obligations of lodging establishments with respect to service animals. This document contains CHLA’s updated discussion of this topic. First, there has been a significant change regarding California law related to service animals. This change, which is discussed below, will make it easier for lodging operators to deal with guests who claim that their pets are service animals. Here are the basics of California law as it relates to service animals: • There was a time when the California Department of Fair Employment and Housing, which administers California’s Fair Employment and Housing Act (Act), took the position that the Act applied to the lodging industry. At that time, there was concern that lodging operators would have to comply with the more stringent requirements of the Act: (1) it is not limited to dogs— depending on the circumstances, the FEHA protects other types of animals and treats them as service animals; and (2) it provides protections for people who use “comfort” and “companion” animals. Contrary to the Department’s earlier position, however, CHLA was recently advised that the Act only applies to homes, condos, and apartments, and that it does not apply to hotels! • It is important for lodging operators to bear in mind that although the 2011 revisions to the ADA rules regarding service animals expressly state that (1) only dogs qualify as service animals,1 and that (2) “comfort” and “companion” dogs are not service animals,2 if a local jurisdiction in California has broader, more stringent rules than the ADA, the local rules must be complied with. -

2020 NCLEX-PN Test Plan;
Effective April 2020 NCLEX-PN® Examination Test Plan for the National Council Licensure Examination for Practical Nurses Mission Statement NCSBN® empowers and supports nursing regulators in their mandate to protect the public. (Mission Statement Adopted by Delegate Assembly 2019) Purpose and Functions The purpose of NCSBN is to provide an organization through which boards of nursing act and counsel together on matters of common interest and concern affecting the public health, safety and welfare, including the development of licensing examinations in nursing. The major functions of NCSBN include developing the NCLEX-RN® and NCLEX-PN® Examinations, performing policy analysis and promoting uniformity in relationship to the regulation of nursing practice, disseminating data related to NCSBN’s purpose and serving as a forum for information exchange for NCSBN members. Copyright© 2019 National Council of State Boards of Nursing, Inc. (NCSBN) All rights reserved. NCSBN®, NCLEX®, NCLEX-RN® and NCLEX-PN®, TERCAP®, Nursys®, NNAAP® and MACE® are registered trademarks of NCSBN and this document may not be used, reproduced or disseminated to any third party without written permission from NCSBN. Permission is granted to boards of nursing to use or reproduce all or parts of this document for licensure related purposes only. Nonprofit education programs have permission to use or reproduce all or parts of this document for educational purposes only. Use or reproduction of this document for commercial or for-profit use is strictly prohibited. Any authorized reproduction of this document shall display the notice: “Copyright by the National Council of State Boards of Nursing, Inc. All rights reserved.” Or, if a portion of the document is reproduced or incorporated in other materials, such written materials shall include the following credit: “Portions copyright by the National Council of State Boards of Nursing, Inc. -

Relationship Between Body Image and Physical Functioning Following Rehabilitation for Lower-Limb Amputation
Western University Scholarship@Western Physical Therapy Publications Physical Therapy School 2019 Relationship between body image and physical functioning following rehabilitation for lower-limb amputation Jessica Desrochers Courtney Frengopoulos Michael W.C. Payne Ricardo Viana Susan W. Hunter Follow this and additional works at: https://ir.lib.uwo.ca/ptpub Part of the Physical Therapy Commons Relationship between body image and physical functioning following rehabilitation for lower limb amputation Jessica Desrochers BHSc1; Courtney Frengopoulos MSc2; Michael WC Payne MD3; Ricardo Viana MD3; Susan W Hunter PhD3,4 1. School of Health Studies, University of Western Ontario, London, ON; 2. Faculty of Health & Rehabilitation Sciences, University of Western Ontario, London, ON; 3. Department of Physical Medicine & Rehabilitation, Schulich School of Medicine and Dentistry, University of Western Ontario, London, ON; 4. School of Physical Therapy, University of Western Ontario, London, ON. Running title: Body image and mobility in lower extremity amputees Corresponding author: Dr. Susan W Hunter University of Western Ontario School of Physical Therapy Room 1588, Elborn College 1201 Western Road, London, Ontario Email: [email protected] Telephone: 519-661-2111 ext88845 Funding: This work was supported by the St. Joseph’s Foundation Cognitive Vitality and Brain Health Seed Funding Opportunity. The funding body had no involvement in the conduct of the study. Conflict of interest: None to report. Relationship between body image and physical functioning following rehabilitation for lower limb amputation ABSTRACT Objectives: To evaluate change in body image and the association between body image at discharge and mobility 4 months post rehabilitation. Methods: Prospective cohort of consecutive admissions to inpatient prosthetic rehabilitation. -

The Economics of Enhancing Accessibility Estimating the Benefits and Costs of Participation
The Economics of Enhancing Accessibility Estimating the Benefits and Costs of Participation Discussion01 Paper 2017 • 01 Bridget R.D. Burdett TDG Ltd, Hamilton, New Zealand Stuart M. Locke University of Waikato Management School, Hamilton, New Zealand Frank Scrimgeour Institute for Business Research, University of Waikato, Hamilton, New Zealand The Economics of Enhancing Accessibility Estimating the Benefits and Costs of Participation Discussion Paper No. 2017-01 Prepared for the Roundtable on Economics of Accessible Transport 3-4 March 2016, Paris Bridget R.D. Burdett TDG Ltd, Hamilton, New Zealand Stuart M. Locke Department of Finance, University of Waikato Management School, Hamilton, New Zealand Frank Scrimgeour Institute for Business Research, University of Waikato, Hamilton, New Zealand February 2017 The International Transport Forum The International Transport Forum is an intergovernmental organisation with 57 member countries. It acts as a think tank for transport policy and organises the Annual Summit of transport ministers. ITF is the only global body that covers all transport modes. The ITF is politically autonomous and administratively integrated with the OECD. The ITF works for transport policies that improve peoples’ lives. Our mission is to foster a deeper understanding of the role of transport in economic growth, environmental sustainability and social inclusion and to raise the public profile of transport policy. The ITF organises global dialogue for better transport. We act as a platform for discussion and pre- negotiation of policy issues across all transport modes. We analyse trends, share knowledge and promote exchange among transport decision-makers and civil society. The ITF’s Annual Summit is the world’s largest gathering of transport ministers and the leading global platform for dialogue on transport policy. -
Enabling People with Visual Impairments to Navigate Virtual Reality with a Haptic and Auditory Cane Simulation Yuhang Zhao1, 2, Cynthia L
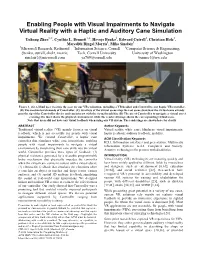
Enabling People with Visual Impairments to Navigate Virtual Reality with a Haptic and Auditory Cane Simulation Yuhang Zhao1, 2, Cynthia L. Bennett1, 3, Hrvoje Benko1, Edward Cutrell1, Christian Holz1, Meredith Ringel Morris1, Mike Sinclair1 1Microsoft Research, Redmond 2Information Science, Cornell 3Computer Science & Engineering, {benko, cutrell, cholz, merrie, Tech, Cornell University University of Washington sinclair}@microsoft.com [email protected] [email protected] Figure 1. (A) A blind user wearing the gear for our VR evaluation, including a VR headset and Canetroller, our haptic VR controller. (B) The mechanical elements of Canetroller. (C) Overlays of the virtual scene atop the real scene show how the virtual cane extends past the tip of the Canetroller device and can interact with the virtual trash bin. (D) The use of Canetroller to navigate a virtual street crossing: the inset shows the physical environment, while the rendered image shows the corresponding virtual scene. Note that users did not have any visual feedback when using our VR system. The renderings are shown here for clarity. ABSTRACT Author Keywords Traditional virtual reality (VR) mainly focuses on visual Virtual reality; white cane; blindness; visual impairments; feedback, which is not accessible for people with visual haptic feedback; auditory feedback; mobility. impairments. We created Canetroller, a haptic cane ACM Classification Keywords controller that simulates white cane interactions, enabling H.5.1. Information interfaces and presentation: Multimedia people -

Sensor-Based Assistive Devices for Visually-Impaired People: Current Status, Challenges, and Future Directions
Review Sensor-Based Assistive Devices for Visually-Impaired People: Current Status, Challenges, and Future Directions Wafa Elmannai and Khaled Elleithy * Department of Computer Science and Engineering, University of Bridgeport, Bridgeport, CT 06604, USA; [email protected] * Correspondence: [email protected]; Tel.: +1-203-576-4703 Academic Editor: Panicos Kyriacou Received: 23 January 2017; Accepted: 1 March 2017; Published: 10 March 2017 Abstract: The World Health Organization (WHO) reported that there are 285 million visually- impaired people worldwide. Among these individuals, there are 39 million who are totally blind. There have been several systems designed to support visually-impaired people and to improve the quality of their lives. Unfortunately, most of these systems are limited in their capabilities. In this paper, we present a comparative survey of the wearable and portable assistive devices for visually- impaired people in order to show the progress in assistive technology for this group of people. Thus, the contribution of this literature survey is to discuss in detail the most significant devices that are presented in the literature to assist this population and highlight the improvements, advantages, disadvantages, and accuracy. Our aim is to address and present most of the issues of these systems to pave the way for other researchers to design devices that ensure safety and independent mobility to visually-impaired people. Keywords: assistive devices; visually-impaired people; obstacles detection; navigation and orientation systems; obstacles avoidance 1. Introduction The World Health Organization (WHO) Fact reported that there are 285 million visually- impaired people worldwide. Among these individuals, there are 39 million who are blind in the world [1]. -

Trams, Similar Vehicles and Systems
TRAMS, SIMILAR VEHICLES AND SYSTEMS Technical Assistance Manual October, 1992 Table of Contents Introduction ...................................................................... 1 Background ...................................................................... 1 Regulations ...................................................................... 4 Vehicles Covered .................................................................. 5 Operations ........................................................................ 5 Wheelchair and Mobility Aid Standards ............................................... 5 Minimum Requirements ............................................................ 5 Periodic Revisions .................................................................. 6 How These Manuals are Organ ized ................................................... 6 Other Publications ................................................................. 7 §1192.1 Purpose. ................................................................... 8 §1192.2 Equivalent facilitation. ....................................................... 8 §1192.3 Defin itions. ............................................................... 9 §1192.4 Miscellaneous instructions. .................................................. 12 §1192.179 Trams, similar vehicles and systems. ........................................ 14 §1192.23 Mobility aid accessibility. .................................................. 15 (a) General (not ap plicable) (b) Vehicle lift. ............................................................ -

MUSCULOSKELETAL PHYSICAL THERAPY for SACROILIAC JOINT PAIN Anas Alhakami*1, Mohammed Qasheesh2, Senthilkumar Cennappan Bose3
International Journal of Physiotherapy and Research, Int J Physiother Res 2020, Vol 8(4):3533-36. ISSN 2321-1822 Case Report DOI: https://dx.doi.org/10.16965/ijpr.2020.144 MUSCULOSKELETAL PHYSICAL THERAPY FOR SACROILIAC JOINT PAIN Anas Alhakami*1, Mohammed Qasheesh2, Senthilkumar Cennappan Bose3. *1 Senior Musculoskeletal Physical Therapist, King Faisal Medical City for Southern Regions, Kingdom of Saudi Arabia. 2 Assistant Professor and Head-Physical Therapy, Jazan University,Kingdom of Saudi Arabia 3 Lecturer-Physical Therapy, Jazan University, Kingdom of Saudi Arabia. ABSTRACT This case report describes a clinical case of a 53 years aged male with Low Back Pain(LBP) at Sacro Iliac Joint(SIJ). Patient referred to physical therapy department with LBP over the past 3 weeks. Pain extended to posterior aspect of left thigh and worsening with prolonged standing, sitting and with stair climbing. Moreover, he found difficulty to ride his car or going from sit to stand. He had a history of road traffic accident 30 years ago that led to severe pain in his lower back area, he was a farmer as well and was working hardly more than 8 hours daily by lifting heavy objects. Patient came to the department by walking with assistive cane. By palpation, there was a local tenderness at the posterior aspect of the SIJ. Range of motion was limited by pain in lumbar flexion, extension, rotation and bilateral side bending movements. Pain scored 7 out of 10 on Numerical Pain Rating Visual Analogue Scale. Functional disability scored 19 out of 24 on Roland-Morris Disability questionnaire.