Digging Inside the Vxworks OS and Firmware the Holistic Security
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Wind River Vxworks Platforms 3.8
Wind River VxWorks Platforms 3.8 The market for secure, intelligent, Table of Contents Build System ................................ 24 connected devices is constantly expand- Command-Line Project Platforms Available in ing. Embedded devices are becoming and Build System .......................... 24 VxWorks Edition .................................2 more complex to meet market demands. Workbench Debugger .................. 24 New in VxWorks Platforms 3.8 ............2 Internet connectivity allows new levels of VxWorks Simulator ....................... 24 remote management but also calls for VxWorks Platforms Features ...............3 Workbench VxWorks Source increased levels of security. VxWorks Real-Time Operating Build Configuration ...................... 25 System ...........................................3 More powerful processors are being VxWorks 6.x Kernel Compatibility .............................3 considered to drive intelligence and Configurator ................................. 25 higher functionality into devices. Because State-of-the-Art Memory Host Shell ..................................... 25 Protection ..................................3 real-time and performance requirements Kernel Shell .................................. 25 are nonnegotiable, manufacturers are VxBus Framework ......................4 Run-Time Analysis Tools ............... 26 cautious about incorporating new Core Dump File Generation technologies into proven systems. To and Analysis ...............................4 System Viewer ........................ -
Wind River Linux Subscription and Services Offerings
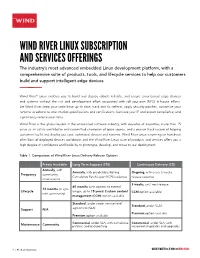
WIND RIVER LINUX SUBSCRIPTION AND SERVICES OFFERINGS The industry’s most advanced embedded Linux development platform, with a comprehensive suite of products, tools, and lifecycle services to help our customers build and support intelligent edge devices Wind River® Linux enables you to build and deploy robust, reliable, and secure Linux-based edge devices and systems without the risk and development effort associated with roll-your-own (RYO) in-house efforts. Let Wind River keep your code base up to date, track and fix defects, apply security patches, customize your runtime to adhere to strict market specifications and certifications, facilitate your IP and export compliance, and significantly reduce your costs. Wind River is the global leader in the embedded software industry, with decades of expertise, more than 15 years as an active contributor and committed champion of open source, and a proven track record of helping customers build and deploy use case–optimized devices and systems. Wind River Linux is running on hundreds of millions of deployed devices worldwide, and the Wind River Linux suite of products and services offers you a high degree of confidence and flexibility to prototype, develop, and move to real deployment. Table 1. Comparison of Wind River Linux Delivery Release Options Freely Available Long Term Support (LTS) Continuous Delivery (CD) Annually, with Annually, with predictable Rolling Ongoing, with every-3-weeks Frequency community Cumulative Patch Layer (RCPL) cadence release cadence maintenance 3 weeks, until next -

Comparison of Contemporary Real Time Operating Systems
ISSN (Online) 2278-1021 IJARCCE ISSN (Print) 2319 5940 International Journal of Advanced Research in Computer and Communication Engineering Vol. 4, Issue 11, November 2015 Comparison of Contemporary Real Time Operating Systems Mr. Sagar Jape1, Mr. Mihir Kulkarni2, Prof.Dipti Pawade3 Student, Bachelors of Engineering, Department of Information Technology, K J Somaiya College of Engineering, Mumbai1,2 Assistant Professor, Department of Information Technology, K J Somaiya College of Engineering, Mumbai3 Abstract: With the advancement in embedded area, importance of real time operating system (RTOS) has been increased to greater extent. Now days for every embedded application low latency, efficient memory utilization and effective scheduling techniques are the basic requirements. Thus in this paper we have attempted to compare some of the real time operating systems. The systems (viz. VxWorks, QNX, Ecos, RTLinux, Windows CE and FreeRTOS) have been selected according to the highest user base criterion. We enlist the peculiar features of the systems with respect to the parameters like scheduling policies, licensing, memory management techniques, etc. and further, compare the selected systems over these parameters. Our effort to formulate the often confused, complex and contradictory pieces of information on contemporary RTOSs into simple, analytical organized structure will provide decisive insights to the reader on the selection process of an RTOS as per his requirements. Keywords:RTOS, VxWorks, QNX, eCOS, RTLinux,Windows CE, FreeRTOS I. INTRODUCTION An operating system (OS) is a set of software that handles designed known as Real Time Operating System (RTOS). computer hardware. Basically it acts as an interface The motive behind RTOS development is to process data between user program and computer hardware. -

AMNESIA 33: How TCP/IP Stacks Breed Critical Vulnerabilities in Iot
AMNESIA:33 | RESEARCH REPORT How TCP/IP Stacks Breed Critical Vulnerabilities in IoT, OT and IT Devices Published by Forescout Research Labs Written by Daniel dos Santos, Stanislav Dashevskyi, Jos Wetzels and Amine Amri RESEARCH REPORT | AMNESIA:33 Contents 1. Executive summary 4 2. About Project Memoria 5 3. AMNESIA:33 – a security analysis of open source TCP/IP stacks 7 3.1. Why focus on open source TCP/IP stacks? 7 3.2. Which open source stacks, exactly? 7 3.3. 33 new findings 9 4. A comparison with similar studies 14 4.1. Which components are typically flawed? 16 4.2. What are the most common vulnerability types? 17 4.3. Common anti-patterns 22 4.4. What about exploitability? 29 4.5. What is the actual danger? 32 5. Estimating the reach of AMNESIA:33 34 5.1. Where you can see AMNESIA:33 – the modern supply chain 34 5.2. The challenge – identifying and patching affected devices 36 5.3. Facing the challenge – estimating numbers 37 5.3.1. How many vendors 39 5.3.2. What device types 39 5.3.3. How many device units 40 6. An attack scenario 41 6.1. Other possible attack scenarios 44 7. Effective IoT risk mitigation 45 8. Conclusion 46 FORESCOUT RESEARCH LABS RESEARCH REPORT | AMNESIA:33 A note on vulnerability disclosure We would like to thank the CERT Coordination Center, the ICS-CERT, the German Federal Office for Information Security (BSI) and the JPCERT Coordination Center for their help in coordinating the disclosure of the AMNESIA:33 vulnerabilities. -

Evidence Company Description …And Future Challenges
1 Evidence Company description …and future challenges Paolo Gai, [email protected] IWES Workshop Pisa, 21 September 2016 2 The company Founded in 2002 as spin-off company of the Real-Time Systems Lab at Scuola Superiore S.Anna ~20 qualified people with an average age of 34 years 10+ years of experience in academic and industrial projects One third of the company has a PhD degree Our Mission : design and development software for small electronic devices 3 The company Partner in several European and Italian research projects (FP6, FP7, Ind.2015, Reg. Tuscany, H2020) Founded SSG Srl in November 2011 http://www.ssginnovation.com/ - (link to SSG slides) Evidence won the first prize at Start Cup Pisa 2005 March 12, 2007 - selected by ”Corriere della Sera ” as one of the most innovative Italian young entrepreneurs 4 (some) customers OSEK, microcontrollers, schedulability analysis, code generation Linux, SW devel. Listed as 3 rd party 5 products and services RTOS , Firmware, Embedded Linux Model-based design • OSEK/VDX, • Matlab/Simulink/Stateflow AUTOSAR, device drivers • Embedded Linux: 8 Yrs experience • National Instruments custom BSPs, GCC, U-Boot, LabView Kernel drivers • Initial developers of the • E4Coder toolset for code SCHED_DEADLINE patch generation • QEMU and emulators • UML/SYSML/Ecore/ Application Development Eclipse/Acceleo 6 Something about ERIKA Enterprise http://erika.tuxfamily.org • ERIKA Enterprise is an RTOS OSEK/VDX certified • ERIKA Enterprise implements an API inspired to a subset of the AUTOSAR API • open-source license -

Analysis of Firmware Security in Embedded ARM Environments
Analysis of Firmware Security in Embedded ARM Environments Dane A. Brown Dissertation submitted to the Faculty of the Virginia Polytechnic Institute and State University in partial fulfillment of the requirements for the degree of Doctor of Philosophy in Computer Engineering T. Charles Clancy, Chair Ryan Gerdes Yaling Yang Jonathan Black Patrick Schaumont August 13, 2019 Arlington, Virginia Keywords: Security, Firmware, Embedded Devices, ARM Copyright 2019, Dane A. Brown Analysis of Firmware Security in Embedded ARM Environments Dane A. Brown (ABSTRACT) Modern enterprise-grade systems with virtually unlimited resources have many options when it comes to implementing state of the art intrusion prevention and detection solutions. These solutions are costly in terms of energy, execution time, circuit board area, and capital. Sus- tainable Internet of Things devices and power-constrained embedded systems are thus forced to make suboptimal security trade-offs. One such trade-off is the design of architectures which prevent execution of injected shell code, yet have allowed Return Oriented Program- ming (ROP) to emerge as a more reliable way to execute malicious code following attacks. ROP is a method used to take over the execution of a program by causing the return address of a function to be modified through an exploit vector, then returning to small segments of otherwise innocuous code located in executable memory one after the other to carry out the attacker’s aims. We show that the Tiva TM4C123GH6PM microcontroller, which utilizes an ARM Cortex-M4F processor, can be fully controlled with this technique. Firmware code is pre-loaded into a ROM on Tiva microcontrollers which can be subverted to erase and rewrite the flash memory where the program resides. -

RT-ROS: a Real-Time ROS Architecture on Multi-Core Processors
Future Generation Computer Systems 56 (2016) 171–178 Contents lists available at ScienceDirect Future Generation Computer Systems journal homepage: www.elsevier.com/locate/fgcs RT-ROS: A real-time ROS architecture on multi-core processors Hongxing Wei a,1, Zhenzhou Shao b, Zhen Huang a, Renhai Chen d, Yong Guan b, Jindong Tan c,1, Zili Shao d,∗,1 a School of Mechanical Engineering and Automation, Beihang University, Beijing, 100191, PR China b College of Information Engineering, Capital Normal University, Beijing, 100048, PR China c Department of Mechanical, Aerospace, and Biomedical Engineering, The University of Tennessee, Knoxville, TN, 37996-2110, USA d Department of Computing, The Hong Kong Polytechnic University, Hong Kong, China article info a b s t r a c t Article history: ROS, an open-source robot operating system, is widely used and rapidly developed in the robotics Received 6 February 2015 community. However, running on Linux, ROS does not provide real-time guarantees, while real-time tasks Received in revised form are required in many robot applications such as robot motion control. This paper for the first time presents 20 April 2015 a real-time ROS architecture called RT-RTOS on multi-core processors. RT-ROS provides an integrated Accepted 12 May 2015 real-time/non-real-time task execution environment so real-time and non-real-time ROS nodes can be Available online 9 June 2015 separately run on a real-time OS and Linux, respectively, with different processor cores. In such a way, real-time tasks can be supported by real-time ROS nodes on a real-time OS, while non-real-time ROS nodes Keywords: Real-time operating systems on Linux can provide other functions of ROS. -

Vxworks - Real Time Operating System
VxWorks - Real Time Operating System General Purpose Platform, VxWorks Edition, is a complete, flexible, optimized COTS development and run-time platform that works out of the box and across the enterprise. The platform provides a powerful, scalable development environment built on open standards and industry-leading tools; the industry’s most trusted commercial-grade RTOS; and tightly integrated run-time technologies. This proven technology package comes wrapped in a 20+-year track record, an exceptional ecosystem of hardware and software partners, and the industry’s most comprehensive support organization. General Purpose Platform is an optimized develop and run solution for a range of devices, from A&D applications to networking and consumer electronics, robotics and industrial applications, precision medical instruments, and car navigation and telematics systems. The platform provides a robust foundation for companies that need to leverage their investment in proprietary intellectual property. It has been deployed successfully in millions of devices worldwide. General Purpose Platform is based on the world’s most widely adopted RTOS. Built on a highly scalable, deterministic, hard real-time kernel, VxWorks enables companies to scale and optimize their run-time environment using only the specific technologies required by their device. From the smallest footprint requirement to the highest performance level, VxWorks gives developers the flexibility to build their optimal solution quickly and easily while meeting cost, quality, and functionality requirements. VxWorks supports POSIX and industry-standard protocols such as TIPC and IPv6, ensuring maximum code portability and interoperability. VxWorks 6.x is backward compatible with previous releases, so developers can leverage and reuse existing projects, intellectual property, BSPs, and drivers, as well as open-source applications. -

Coreboot - the Free firmware
coreboot - the free firmware Linux Club of Peking University April 9th, 2016 . Linux Club of Peking University coreboot - the free firmware April 9th, 2016 1 / 30 1 History 2 Why use coreboot 3 How coreboot works 4 Building and using coreboot 5 Flashing 6 Utilities and Debugging 7 Contribute to coreboot 8 Proprietary Components 9 References . Linux Club of Peking University coreboot - the free firmware April 9th, 2016 2 / 30 History: from LinuxBIOS to coreboot coreboot has a very long history, stretching back more than 15 years to when it was known as LinuxBIOS. While the project has gone through lots of changes over the years, many of the earliest developers still contribute today. Linux Club of Peking University coreboot - the free firmware April 9th, 2016 3 / 30 LinuxBIOS v1: 1999-2000 The coreboot project originally started as LinuxBIOS in 1999 at Los Alamos National Labs (LANL) by Ron Minnich. Ron needed to boot a cluster made up of many x86 mainboards without the hassles that are part of the PC BIOS. The goal was to do minimal hardware initilization in order to boot Linux as fast as possible. Linux already had the drivers and support to initialize the majority of devices. Ron and a number of other key contributors from LANL, Linux NetworkX, and other open source firmware projects successfully booted Linux from flash. From there they were able to discover other nodes in the cluster, load a full kernel and user space, and start the clustering software. Linux Club of Peking University coreboot - the free firmware April 9th, 2016 4 / 30 LinuxBIOS v2: 2000-2005 After the initial success of v1, the design was expanded to support more CPU architectures (x86, Alpha, PPC) and to support developers with increasingly diverse needs. -

Linux Kernel. LTS? LTSI?
ARM Reference Kernel of Tizen 3 MyungJoo Ham, Ph.D. MyungJoo Ham Tizen “System Domain” & System SW Lab “Base Domain” Architect SW Platform Team SWC Samsung Electronics ARM Reference Kernel of Tizen 3 1. What is it? 2. Idea & Principle 3. Design & Updates 4. Discussion What is “Tizen Reference Kernel” • Kernel (& BSP) for Tizen Reference Devices BSP Validated & Tested for the Reference Devices Image from seoz.com 3 What is “Tizen Reference Kernel” • Kernel (& BSP) for Tizen Reference Devices BSP Validated & Tested for the Reference Devices Yet Another BSP? Image from seoz.com 4 Need for “Tizen Reference Kernel” • Distribute reference devices • Tizen-common kernel features & interface • Basis for next-gen Tizen development 1 KDBUS, User PM-QoS, PASS, DMABUF Sync FW, … 2 CMA, DRM-Exynos, Devfreq, Extcon, Charger-manager, LAB/Turboboost … • Support Tizen Vendors! • Well-known and well-written example. • Code basis for vendors. 5 Previous Tizen ARM Reference Kernel (~2.2.1) • Linux 3.0.15 • Obsolete LTS. (Current: 3.4 & 3.10) • Support RD-PQ (Tizen 2) & RD-210 (Tizen 1 & 2) • RD-PQ: Exynos4412 • RD-210: Exynos4210 (Linux 2.6.36 for Tizen 1) • Not Good as Reference • Too many backported features. • Too OLD! No LTS/LTSI support • Many kernel hacks & dirty patches • git history removed. 1. Forked from production kernel. 2. Hard to read 6 Status of Tizen 3 Reference Kernels • Two Reference Kernels: ARM / Intel • ARM (armv7, aarch64) • Linux 3.10.y • 3.10.33 @ 2014/05 • Full git history. • armv6 support (Raspberry Pi) coming soon. (Thanks to Univ. of Warsaw) • Test & validation phase (integration test with userspace) • Intel (x86, x86_64) • Linux 3.14.1 • Recent ATOM SoC support merged @ 3.14 • Test & validation phase (integration test with userspace) 7 ARM Reference Kernel of Tizen 3 1. -

OPERATING SYSTEMS.Ai
Introduction Aeroflex Gaisler provides LEON and ERC32 users with a wide range of popular embedded operating systems. Ranging from very small footprint task handlers to full featured Real-Time Operating System (RTOS). A summary of available operating systems and their characteristics is outlined below. VxWorks The VxWorks SPARC port supports LEON3/4 and LEON2. Drivers for standard on-chip peripherals are included. The port supports both non-MMU and MMU systems allowing users to program fast and secure applications. Along with the graphical Eclipse based workbench comes the extensive VxWorks documentation. • MMU and non-MMU system support • SMP support (in 6.7 and later) • Networking support (Ethernet 10/100/1000) • UART, Timer, and interrupt controller support • PCI, SpaceWire, CAN, MIL-STD-1553B, I2C and USB host controller support • Eclipse based Workbench • Commercial license ThreadX The ThreadX SPARC port supports LEON3/4 and its standard on-chip peripherals. ThreadX is an easy to learn and understand advanced pico-kernel real-time operating system designed specifically for deeply embedded applications. ThreadX has a rich set of system services for memory allocation and threading. • Non-MMU system support • Bundled with newlib C library • Support for NetX, and USBX ® • Very small footprint • Commercial license Nucleus Nucleus is a real time operating system which offers a rich set of features in a scalable and configurable manner. • UART, Timer, Interrupt controller, Ethernet (10/100/1000) • TCP offloading and zero copy TCP/IP stack (using GRETH GBIT MAC) • USB 2.0 host controller and function controller driver • Small footprint • Commercial license LynxOS LynxOS is an advanced RTOS suitable for high reliability environments. -
Introductory Lecture & FLOSS
Introductory Lecture & FLOSS Lecture 1 TU Wien, 193.067 Free and Open Technologies (WS 2019/2020) Christoph Derndorfer and Lukas F. Lang This work is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License. Introduction Organization ● Lectures: ○ Weekly lecture to cover course materials (until Christmas) ○ Lectures take place on Tuesdays, 17:00–19:00, Argentinierstraße 8, Seminarraum/Bibliothek 194-05 ○ Attendance is mandatory ● Group project: ○ In groups of 4 students ○ 3 meetings with lecturers during the semester (week 44/2019, week 48/2019, week 2/2020) ○ Final presentations at the end of January (week 4/2020) ● Final paper: ○ In groups of 2 students ○ Final presentations at the end of January (week 5/2020) ○ Deadline: Sunday, February 9, 2020, 23:59 CET (no exceptions!) Organization ● Grading: ○ 50% group project ○ 35% seminar paper ○ 15% participation during lectures ○ All course components need to be passed in order to pass the overall course! ● Course materials: ○ Will be provided at https://free-and-open-technologies.github.io ● For further questions: ○ Email [email protected] and [email protected] Lecture outline 1. FLOSS (Free/Libre and Open Source Software) 2. Open Hardware 3. Open Data 4. Open Content/Open Educational Resources 5. Open Science/Research 6. Open Access 7. Open Spaces/Open Practices: Metalab Vienna 8. Guest Lecture: Stefanie Wuschitz (Mz* Baltazar’s Lab) Group project ● Goal: ○ Extend, contribute to, or create a new open project within scope of lecture topics ● Choose topic from a list (see course website) or (even better) suggest your own: ○ Groups of 4 students ○ Send a 1-page proposal until Friday, October 25, via email to both lecturers ■ Define the idea, goal, (potential) impact, requirements, and estimated effort ■ State deliverables (should be broken down into three milestones to discuss in meetings) ● Requirements: ○ Open and accessible (Git repository, openly licensed) → others can access/use/study/extend ○ Use time sheet to track and compare estimated vs.