A Complexity Theory for Labeling Schemes
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

A Complexity Theory for Implicit Graph Representations
A Complexity Theory for Implicit Graph Representations Maurice Chandoo Leibniz Universität Hannover, Theoretical Computer Science, Appelstr. 4, 30167 Hannover, Germany [email protected] Abstract In an implicit graph representation the vertices of a graph are assigned short labels such that adjacency of two vertices can be algorithmically determined from their labels. This allows for a space-efficient representation of graph classes that have asymptotically fewer graphs than the class of all graphs such as forests or planar graphs. A fundamental question is whether every smaller graph class has such a representation. We consider how restricting the computational complexity of such representations affects what graph classes can be represented. A formal language can be seen as implicit graph representation and therefore complexity classes such as P or NP can be understood as set of graph classes. We investigate this complexity landscape and introduce complexity classes defined in terms of first order logic that capture surprisingly many of the graph classes for which an implicit representation is known. Additionally, we provide a notion of reduction between graph classes which reveals that trees and interval graphs are ‘complete’ for certain fragments of first order logic in this setting. 1998 ACM Subject Classification G.2.2 Graph Theory, F.1.3 Complexity Measures and Classes Keywords and phrases adjacency labeling schemes, complexity of graph properties We call a graph class small if it has at most 2O(n log n) graphs on n vertices. Many important graph classes such as interval graphs are small. Using adjacency matrices or lists to represent such classes is not space-efficient since this requires n2 bits (resp. -

Abstracting Abstraction in Search II: Complexity Analysis
Proceedings of the Fifth Annual Symposium on Combinatorial Search Abstracting Abstraction in Search II: Complexity Analysis Christer Backstr¨ om¨ and Peter Jonsson Department of Computer Science, Linkoping¨ University SE-581 83 Linkoping,¨ Sweden [email protected] [email protected] Abstract In our earlier publication (Backstr¨ om¨ and Jonsson 2012) we have demonstrated the usefulness of this framework in Modelling abstraction as a function from the original state various ways. We have shown that a certain combination of space to an abstract state space is a common approach in com- our transformation properties exactly captures the DPP con- binatorial search. Sometimes this is too restricted, though, cept by Zilles and Holte (2010). A related concept is that and we have previously proposed a framework using a more flexible concept of transformations between labelled graphs. of path/plan refinement without backtracking to the abstract We also proposed a number of properties to describe and clas- level. Partial solutions to capturing this concept have been sify such transformations. This framework enabled the mod- presented in the literature, for instance, the ordered mono- elling of a number of different abstraction methods in a way tonicity criterion by Knoblock, Tenenberg, and Yang (1991), that facilitated comparative analyses. It is of particular inter- the downward refinement property (DRP) by Bacchus and est that these properties can be used to capture the concept of Yang (1994), and the simulation-based approach by Bundy refinement without backtracking between levels; how to do et al. (1996). However, how to define general conditions this has been an open question for at least twenty years. -

Implicit Structures for Graph Neural Networks
Implicit Structures for Graph Neural Networks Fangda Gu Electrical Engineering and Computer Sciences University of California at Berkeley Technical Report No. UCB/EECS-2020-185 http://www2.eecs.berkeley.edu/Pubs/TechRpts/2020/EECS-2020-185.html November 23, 2020 Copyright © 2020, by the author(s). All rights reserved. Permission to make digital or hard copies of all or part of this work for personal or classroom use is granted without fee provided that copies are not made or distributed for profit or commercial advantage and that copies bear this notice and the full citation on the first page. To copy otherwise, to republish, to post on servers or to redistribute to lists, requires prior specific permission. Acknowledgement I would like to express my most sincere gratitude to Professor Laurent El Ghaoui and Professor Somayeh Sojoudi for their support in my academic life. The helpful discussions with them on my research have guided me through the past two successful years at University of California, Berkeley. I want to thank Heng Chang and Professor Wenwu Zhu for their help in the implementation and verification of the work. I also want to thank Shirley Salanio for her strong logistical and psychological support. Implicit Structures for Graph Neural Networks by Fangda Gu Research Project Submitted to the Department of Electrical Engineering and Computer Sciences, University of California at Berkeley, in partial satisfaction of the requirements for the degree of Master of Science, Plan II. Approval for the Report and Comprehensive Examination: Committee: Professor Laurent El Ghaoui Research Advisor (Date) * * * * * * * Professor Somayeh Sojoudi Second Reader 11/19/2020 (Date) Implicit Structures for Graph Neural Networks Fangda Gu Abstract Graph Neural Networks (GNNs) are widely used deep learning models that learn meaningful representations from graph-structured data. -

Large-Scale Directed Model Checking LTL
Large-Scale Directed Model Checking LTL Stefan Edelkamp and Shahid Jabbar University of Dortmund Otto-Hahn Straße 14 {stefan.edelkamp,shahid.jabbar}@cs.uni-dortmund.de Abstract. To analyze larger models for explicit-state model checking, directed model checking applies error-guided search, external model check- ing uses secondary storage media, and distributed model checking exploits parallel exploration on multiple processors. In this paper we propose an external, distributed and directed on-the-fly model checking algorithm to check general LTL properties in the model checker SPIN. Previous attempts restricted to checking safety proper- ties. The worst-case I/O complexity is bounded by O(sort(|F||R|)/p + l · scan(|F||S|)), where S and R are the sets of visited states and transitions in the synchronized product of the B¨uchi automata for the model and the property specification, F is the number of accepting states, l is the length of the shortest counterexample, and p is the number of processors. The algorithm we propose returns minimal lasso-shaped counterexam- ples and includes refinements for property-driven exploration. 1 Introduction The core limitation to the exploration of systems are bounded main memory resources. Relying on virtual memory slows down the exploration due to excessive page faults. External algorithms [31] exploit hard disk space and organize the access to secondary memory. Originally designed for explicit graphs, external search algorithms have shown considerably good performances in the large-scale breadth-first and guided exploration of games [22, 12] and in the analysis of model checking problems [24]. Directed explicit-state model checking [13] enhances the error-reporting capa- bilities of model checkers. -

Shorter Implicit Representation for Planar Graphs and Bounded Treewidth Graphs
Shorter Implicit Representation for Planar Graphs and Bounded Treewidth Graphs Cyril Gavoille and Arnaud Labourel LaBRI, Universit´e de Bordeaux, France {gavoille,labourel}@labri.fr Abstract. Implicit representation of graphs is a coding of the structure of graphs using distinct labels so that adjacency between any two vertices can be decided by inspecting their labels alone. All previous implicit rep- resentations of planar graphs were based on the classical three forests de- composition technique (a.k.a. Schnyder’s trees), yielding asymptotically toa3logn-bit1 label representation where n is the number of vertices of the graph. We propose a new implicit representation of planar graphs using asymptotically 2 log n-bit labels. As a byproduct we have an explicit construction of a graph with n2+o(1) vertices containing all n-vertex pla- nar graphs as induced subgraph, the best previous size of such induced- universal graph was O(n3). More generally, for graphs excluding a fixed minor, we construct a 2logn + O(log log n) implicit representation. For treewidth-k graphs we give a log n + O(k log log(n/k)) implicit representation, improving the O(k log n) representation of Kannan, Naor and Rudich [18] (STOC ’88). Our representations for planar and treewidth-k graphs are easy to implement, all the labels can be constructed in O(n log n)time,and support constant time adjacency testing. 1 Introduction How to represent a graph in memory is a basic and fundamental data structure question. The two basic ways are adjacency matrices and adjacency lists. The latter representation is space efficient for sparse graphs, but adjacency queries require searching in the list, whereas matrices allow fast queries to the price of a super-linear space. -

Graph Fairing Convolutional Networks for Anomaly Detection
Graph Fairing Convolutional Networks for Anomaly Detection Mahsa Mesgaran and A. Ben Hamza Concordia Institute for Information Systems Engineering Concordia University, Montreal, QC, Canada Abstract class (i.e. normal class) by learning a discriminative hyperplane boundary around the normal instances. Another commonly- Graph convolution is a fundamental building block for many used anomaly detection approach is support vector data descrip- deep neural networks on graph-structured data. In this paper, tion (SVDD) [4], which basically finds the smallest possible hy- we introduce a simple, yet very effective graph convolutional persphere that contains all instances, allowing some instances to network with skip connections for semi-supervised anomaly de- be excluded as anomalies. However, these approaches rely on tection. The proposed multi-layer network architecture is theo- hand-crafted features, are unable to appropriately handle high- retically motivated by the concept of implicit fairing in geome- dimensional data, and often suffer from computational scalabil- try processing, and comprises a graph convolution module for ity issues. aggregating information from immediate node neighbors and Deep learning has recently emerged as a very powerful way a skip connection module for combining layer-wise neighbor- to hierarchically learn abstract patterns from data, and has been hood representations. In addition to capturing information from successfully applied to anomaly detection, showing promising distant graph nodes through skip connections between the net- results in comparison with shallow methods [5]. Ruff et al. [6] work’s layers, our approach exploits both the graph structure and extend the shallow one-class classification SVDD approach to node features for learning discriminative node representations. -

Shorter Labeling Schemes for Planar Graphs∗
Shorter Labeling Schemes for Planar Graphs∗ Marthe Bonamy† Cyril Gavoille‡ Michał Pilipczuk§ April 20, 2020 Abstract An adjacency labeling scheme for a given class of graphs is an algorithm that for every graph G from the class, assigns bit strings (labels) to vertices of G so that for any two vertices u; v, whether u and v are adjacent can be determined by a xed procedure that examines only their labels. It is known that planar graphs with n vertices admit a labeling scheme with labels of bit length (2 + o(1)) log n. In this 4 work we improve this bound by designing a labeling scheme with labels of bit length ( 3 + o(1)) log n. All the labels of the input graph can be computed in polynomial time, while adjacency can be decided from the labels in constant time. In graph-theoretical terms, this implies an explicit construction of a graph on n4=3+o(1) vertices that contains all planar graphs on n vertices as induced subgraphs, improving the previous best upper bound of n2+o(1). Our labeling scheme can be generalized to larger classes of topologically-constrained graphs, for instance to graphs embeddable in any xed surface or to k-planar graphs for any xed k, at the cost of larger second-order terms. Keywords: planar graphs, labeling scheme, universal graphs arXiv:1908.03341v2 [cs.DS] 17 Apr 2020 ∗The preliminary version of this work [BGP20] was presented at the 31st Symposium on Discrete Algorithms, SODA 2020. The work of Michał Pilipczuk is a part of project TOTAL that have received funding from the European Research Council (ERC) under the European Union’s Horizon 2020 research and innovation programme (grant agreement No. -

A Sublinear Implicit Algorithm for Maximum Bipartite Matchings
A Sublinear Implicit Algorithm for Maximum Bipartite Matchings Beate Bollig and Tobias Pr¨oger TU Dortmund, LS2 Informatik, 44221 Dortmund, Germany Abstract. The maximum bipartite matching problem is one of the most fundamental algorithmic graph problems, e.g., many resource-allocation problems can be formulated as a maximum matching problem on a bipar- tite graph. Since in some applications graphs become larger and larger, a research branch has emerged which is concerned with the design and analysis of implicit algorithms for classical graph problems. Inputs are given as characteristic Boolean functions of the edge sets and problems have to be solved by efficient functional operations. Here, an implicit maximum bipartite matching algorithm is presented that uses only a sublinear number of functional operations with respect to the number of vertices of the input graph. This is the first sublinear implicit algorithm for a problem unknown to be in the complexity class NC. The algorithm uses a new sublinear algorithm for the computation of maximal node- disjoint paths. As a by-product a maximal matching algorithm is shown which uses only a ploylogarithmic number of operations. 1 Introduction Since some modern applications require huge graphs, explicit representations by adjacency matrices or adjacency lists may cause conflicts with memory lim- itations and even polynomial time algorithms are sometimes not fast enough. As time and space resources do not suffice to consider individual vertices and edges, one way out seems to be to deal with sets of vertices and edges rep- resented by their characteristic functions. Ordered binary decision diagrams, denoted OBDDs, introduced by Bryant in 1986 [6], are well suited for the rep- resentation and manipulation of Boolean functions, therefore, a research branch has emerged which is concerned with the design and analysis of so-called im- plicit or symbolic algorithms for classical graph problems on OBDD-represented graph instances (see, e.g., [8, 9], [12], [19], [20, 21], and [24]). -

On Forbidden Induced Subgraphs for Unit Disk Graphs
On forbidden induced subgraphs for unit disk graphs Aistis Atminas∗ Viktor Zamaraevy Abstract A unit disk graph is the intersection graph of disks of equal radii in the plane. The class of unit disk graphs is hereditary, and therefore admits a characterization in terms of minimal forbidden induced subgraphs. In spite of quite active study of unit disk graphs very little is known about minimal forbidden induced subgraphs for this class. We found only finitely many minimal non unit disk graphs in the literature. In this paper we study in a systematic way forbidden induced subgraphs for the class of unit disk graphs. We develop several structural and geometrical tools, and use them to reveal infinitely many new minimal non unit disk graphs. Further we use these results to investigate structure of co-bipartite unit disk graphs. In particular, we give structural characterization of those co-bipartite unit disk graphs whose edges between parts form a C4-free bipartite graph, and show that bipartite complements of these graphs are also unit disk graphs. Our results lead us to propose a conjecture that the class of co-bipartite unit disk graphs is closed under bipartite complementation. 1 Introduction A graph is unit disk graph (UDG for short) if its vertices can be represented as points in the plane such that two vertices are adjacent if and only if the corresponding points are at distance at most 1 from each other. Unit disk graphs has been very actively studied in recent decades. One of the reasons for this is that UDGs appear to be useful in number of applications. -

Probabilistic Data Structures Applied to Implicit Graph Representation
Probabilistic data structures applied to implicit graph representation Juan P. A. Lopes1,∗ Fabiano S. Oliveira1,y Paulo E. D. Pinto1y 1IME/DICC, Universidade do Estado do Rio de Janeiro (UERJ) Av. Sao˜ Francisco Xavier, 524, Maracana˜ – 20550-013 – Rio de Janeiro – RJ [email protected], [email protected], [email protected] Abstract. In recent years, probabilistic data structures have been extensively employed to handle large volumes of streaming data in a timely fashion. How- ever, their use in algorithms on giant graphs has been poorly explored. We introduce the concept of probabilistic implicit graph representation, which can represent large graphs using much less memory asymptotically by allowing ad- jacency test to have a constant probability of false positives or false negatives. This is an extension from the concept of implicit graph representation, compre- hensively studied by Muller and Spinrad. Based on that, we also introduce two novel representations using probabilistic data structures. The first uses Bloom filters to represent general graphs with the same space complexity as the ad- jacency matrix (outperforming it however for sparse graphs). The other uses MinHash to represent trees with lower space complexity than any deterministic implicit representation. Furthermore, we prove some theoretical limitations for the latter approach. 1. Introduction The interest in probabilistic data structures has increased in the recent years. That is a di- rect consequence to the emergence of applications that deal with large volumes of stream- ing data. In those applications, it is often required the ability to answer queries quickly, which is infeasible to do by querying over stored data due to high latency. -
Descriptive Complexity of Graph Classes Via Labeling Schemes
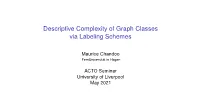
Descriptive Complexity of Graph Classes via Labeling Schemes Maurice Chandoo FernUniversität in Hagen ACTO Seminar University of Liverpool May 2021 2 7 1 3 4 5 6 8 9 10 label `(v) 2 f1;:::; 2ng × f1;:::; 2ng adjacency matrix 2(1+log n) 0 0 ··· 1 1 labeling `: V(G) ! f0; 1g . @ . .. A 1 ··· 0 requires n2 bits u `(u) 0 fu; vg 2= E(G) AIntv alternative representation v `(v) fu; vg 2 E(G) f(1; 3); (2; 7); (4; 5);::: g 1 requires n ·O(log n) bits label decoding algorithm What is a Labeling Scheme? interval graph G Maurice Chandoo Descriptive Complexity of Graph Classes via Labeling Schemes 2/16 2 7 1 3 4 5 6 8 9 10 label `(v) 2 f1;:::; 2ng × f1;:::; 2ng adjacency matrix 2(1+log n) 0 0 ··· 1 1 labeling `: V(G) ! f0; 1g . @ . .. A 1 ··· 0 requires n2 bits u `(u) 0 fu; vg 2= E(G) AIntv alternative representation v `(v) fu; vg 2 E(G) f(1; 3); (2; 7); (4; 5);::: g 1 requires n ·O(log n) bits label decoding algorithm What is a Labeling Scheme? interval graph G Maurice Chandoo Descriptive Complexity of Graph Classes via Labeling Schemes 2/16 2 7 1 3 4 5 6 8 9 10 label `(v) 2 f1;:::; 2ng × f1;:::; 2ng 2(1+log n) 0 0 ··· 1 1 labeling `: V(G) ! f0; 1g . @ . .. A 1 ··· 0 requires n2 bits u `(u) 0 fu; vg 2= E(G) AIntv alternative representation v `(v) fu; vg 2 E(G) f(1; 3); (2; 7); (4; 5);::: g 1 requires n ·O(log n) bits label decoding algorithm What is a Labeling Scheme? interval graph G adjacency matrix Maurice Chandoo Descriptive Complexity of Graph Classes via Labeling Schemes 2/16 2 7 1 3 4 5 6 8 9 10 label `(v) 2 f1;:::; 2ng × f1;:::; 2ng 2(1+log n) 0 0 ··· 1 1 labeling `: V(G) ! f0; 1g . -

On Graph Algorithms for Large-Scale Graphs
On Graph Algorithms for Large-Scale Graphs Dissertation zur Erlangung des Grades eines Doktors der Naturwissenschaften der Technischen Universität Dortmund an der Fakultät für Informatik von Marc Bury geb. Gillé Dortmund 2015 Tag der mündlichen Prüfung: 5. Februar 2016 Dekan: Prof. Dr. Gernot Fink Gutachter: Prof. Dr. Beate Bollig Dr. (habil.) Martin Sauerhoff Summary The algorithmic challenges have changed in the last decade due to the rapid growth of the data set sizes that need to be processed. New types of algorithms on large graphs like social graphs, computer networks, or state transition graphs have emerged to overcome the problem of ever-increasing data sets. In this thesis, we investigate two approaches to this problem. Implicit algorithms utilize lossless compression of data to reduce the size and to directly work on this compressed representation to solve optimization problems. In the case of graphs we are dealing with the characteristic function of the edge set which can be represented by Ordered Binary Decision Diagrams (OBDDs), a well-known data structure for Boolean functions. We develop a new technique to prove upper and lower bounds on the size of OBDDs representing graphs and apply this technique to several graph classes to obtain (almost) optimal bounds. A small input OBDD size is absolutely essential for dealing with large graphs but we also need algorithms that avoid large intermediate results during the computation. For this purpose, we design algorithms for a specific graph class that exploit the encoding of the nodes that we use for the results on the OBDD sizes. In addition, we lay the foundation on the theory of randomization in OBDD-based algorithms by investigating what kind of randomness is feasible and how to design algorithms with it.