Lecture 23 Representing Graphs
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Practical Parallel Hypergraph Algorithms
Practical Parallel Hypergraph Algorithms Julian Shun [email protected] MIT CSAIL Abstract v While there has been signicant work on parallel graph pro- 0 cessing, there has been very surprisingly little work on high- e0 performance hypergraph processing. This paper presents v0 v1 v1 a collection of ecient parallel algorithms for hypergraph processing, including algorithms for betweenness central- e1 ity, maximal independent set, k-core decomposition, hyper- v2 trees, hyperpaths, connected components, PageRank, and v2 v3 e single-source shortest paths. For these problems, we either 2 provide new parallel algorithms or more ecient implemen- v3 tations than prior work. Furthermore, our algorithms are theoretically-ecient in terms of work and depth. To imple- (a) Hypergraph (b) Bipartite representation ment our algorithms, we extend the Ligra graph processing Figure 1. An example hypergraph representing the groups framework to support hypergraphs, and our implementa- , , , , , , and , , and its bipartite repre- { 0 1 2} { 1 2 3} { 0 3} tions benet from graph optimizations including switching sentation. between sparse and dense traversals based on the frontier size, edge-aware parallelization, using buckets to prioritize processing of vertices, and compression. Our experiments represented as hyperedges, can contain an arbitrary number on a 72-core machine and show that our algorithms obtain of vertices. Hyperedges correspond to group relationships excellent parallel speedups, and are signicantly faster than among vertices (e.g., a community in a social network). An algorithms in existing hypergraph processing frameworks. example of a hypergraph is shown in Figure 1a. CCS Concepts • Computing methodologies → Paral- Hypergraphs have been shown to enable richer analy- lel algorithms; Shared memory algorithms. -

A Complexity Theory for Implicit Graph Representations
A Complexity Theory for Implicit Graph Representations Maurice Chandoo Leibniz Universität Hannover, Theoretical Computer Science, Appelstr. 4, 30167 Hannover, Germany [email protected] Abstract In an implicit graph representation the vertices of a graph are assigned short labels such that adjacency of two vertices can be algorithmically determined from their labels. This allows for a space-efficient representation of graph classes that have asymptotically fewer graphs than the class of all graphs such as forests or planar graphs. A fundamental question is whether every smaller graph class has such a representation. We consider how restricting the computational complexity of such representations affects what graph classes can be represented. A formal language can be seen as implicit graph representation and therefore complexity classes such as P or NP can be understood as set of graph classes. We investigate this complexity landscape and introduce complexity classes defined in terms of first order logic that capture surprisingly many of the graph classes for which an implicit representation is known. Additionally, we provide a notion of reduction between graph classes which reveals that trees and interval graphs are ‘complete’ for certain fragments of first order logic in this setting. 1998 ACM Subject Classification G.2.2 Graph Theory, F.1.3 Complexity Measures and Classes Keywords and phrases adjacency labeling schemes, complexity of graph properties We call a graph class small if it has at most 2O(n log n) graphs on n vertices. Many important graph classes such as interval graphs are small. Using adjacency matrices or lists to represent such classes is not space-efficient since this requires n2 bits (resp. -

Abstracting Abstraction in Search II: Complexity Analysis
Proceedings of the Fifth Annual Symposium on Combinatorial Search Abstracting Abstraction in Search II: Complexity Analysis Christer Backstr¨ om¨ and Peter Jonsson Department of Computer Science, Linkoping¨ University SE-581 83 Linkoping,¨ Sweden [email protected] [email protected] Abstract In our earlier publication (Backstr¨ om¨ and Jonsson 2012) we have demonstrated the usefulness of this framework in Modelling abstraction as a function from the original state various ways. We have shown that a certain combination of space to an abstract state space is a common approach in com- our transformation properties exactly captures the DPP con- binatorial search. Sometimes this is too restricted, though, cept by Zilles and Holte (2010). A related concept is that and we have previously proposed a framework using a more flexible concept of transformations between labelled graphs. of path/plan refinement without backtracking to the abstract We also proposed a number of properties to describe and clas- level. Partial solutions to capturing this concept have been sify such transformations. This framework enabled the mod- presented in the literature, for instance, the ordered mono- elling of a number of different abstraction methods in a way tonicity criterion by Knoblock, Tenenberg, and Yang (1991), that facilitated comparative analyses. It is of particular inter- the downward refinement property (DRP) by Bacchus and est that these properties can be used to capture the concept of Yang (1994), and the simulation-based approach by Bundy refinement without backtracking between levels; how to do et al. (1996). However, how to define general conditions this has been an open question for at least twenty years. -

Practical Parallel Hypergraph Algorithms
Practical Parallel Hypergraph Algorithms Julian Shun [email protected] MIT CSAIL Abstract v0 While there has been significant work on parallel graph pro- e0 cessing, there has been very surprisingly little work on high- v0 v1 v1 performance hypergraph processing. This paper presents a e collection of efficient parallel algorithms for hypergraph pro- 1 v2 cessing, including algorithms for computing hypertrees, hy- v v 2 3 e perpaths, betweenness centrality, maximal independent sets, 2 v k-core decomposition, connected components, PageRank, 3 and single-source shortest paths. For these problems, we ei- (a) Hypergraph (b) Bipartite representation ther provide new parallel algorithms or more efficient imple- mentations than prior work. Furthermore, our algorithms are Figure 1. An example hypergraph representing the groups theoretically-efficient in terms of work and depth. To imple- fv0;v1;v2g, fv1;v2;v3g, and fv0;v3g, and its bipartite repre- ment our algorithms, we extend the Ligra graph processing sentation. framework to support hypergraphs, and our implementations benefit from graph optimizations including switching between improved compared to using a graph representation. Unfor- sparse and dense traversals based on the frontier size, edge- tunately, there is been little research on parallel hypergraph aware parallelization, using buckets to prioritize processing processing. of vertices, and compression. Our experiments on a 72-core The main contribution of this paper is a suite of efficient machine and show that our algorithms obtain excellent paral- parallel hypergraph algorithms, including algorithms for hy- lel speedups, and are significantly faster than algorithms in pertrees, hyperpaths, betweenness centrality, maximal inde- existing hypergraph processing frameworks. -

Implicit Structures for Graph Neural Networks
Implicit Structures for Graph Neural Networks Fangda Gu Electrical Engineering and Computer Sciences University of California at Berkeley Technical Report No. UCB/EECS-2020-185 http://www2.eecs.berkeley.edu/Pubs/TechRpts/2020/EECS-2020-185.html November 23, 2020 Copyright © 2020, by the author(s). All rights reserved. Permission to make digital or hard copies of all or part of this work for personal or classroom use is granted without fee provided that copies are not made or distributed for profit or commercial advantage and that copies bear this notice and the full citation on the first page. To copy otherwise, to republish, to post on servers or to redistribute to lists, requires prior specific permission. Acknowledgement I would like to express my most sincere gratitude to Professor Laurent El Ghaoui and Professor Somayeh Sojoudi for their support in my academic life. The helpful discussions with them on my research have guided me through the past two successful years at University of California, Berkeley. I want to thank Heng Chang and Professor Wenwu Zhu for their help in the implementation and verification of the work. I also want to thank Shirley Salanio for her strong logistical and psychological support. Implicit Structures for Graph Neural Networks by Fangda Gu Research Project Submitted to the Department of Electrical Engineering and Computer Sciences, University of California at Berkeley, in partial satisfaction of the requirements for the degree of Master of Science, Plan II. Approval for the Report and Comprehensive Examination: Committee: Professor Laurent El Ghaoui Research Advisor (Date) * * * * * * * Professor Somayeh Sojoudi Second Reader 11/19/2020 (Date) Implicit Structures for Graph Neural Networks Fangda Gu Abstract Graph Neural Networks (GNNs) are widely used deep learning models that learn meaningful representations from graph-structured data. -

Large-Scale Directed Model Checking LTL
Large-Scale Directed Model Checking LTL Stefan Edelkamp and Shahid Jabbar University of Dortmund Otto-Hahn Straße 14 {stefan.edelkamp,shahid.jabbar}@cs.uni-dortmund.de Abstract. To analyze larger models for explicit-state model checking, directed model checking applies error-guided search, external model check- ing uses secondary storage media, and distributed model checking exploits parallel exploration on multiple processors. In this paper we propose an external, distributed and directed on-the-fly model checking algorithm to check general LTL properties in the model checker SPIN. Previous attempts restricted to checking safety proper- ties. The worst-case I/O complexity is bounded by O(sort(|F||R|)/p + l · scan(|F||S|)), where S and R are the sets of visited states and transitions in the synchronized product of the B¨uchi automata for the model and the property specification, F is the number of accepting states, l is the length of the shortest counterexample, and p is the number of processors. The algorithm we propose returns minimal lasso-shaped counterexam- ples and includes refinements for property-driven exploration. 1 Introduction The core limitation to the exploration of systems are bounded main memory resources. Relying on virtual memory slows down the exploration due to excessive page faults. External algorithms [31] exploit hard disk space and organize the access to secondary memory. Originally designed for explicit graphs, external search algorithms have shown considerably good performances in the large-scale breadth-first and guided exploration of games [22, 12] and in the analysis of model checking problems [24]. Directed explicit-state model checking [13] enhances the error-reporting capa- bilities of model checkers. -
Adjacency Matrix
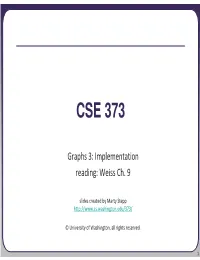
CSE 373 Graphs 3: Implementation reading: Weiss Ch. 9 slides created by Marty Stepp http://www.cs.washington.edu/373/ © University of Washington, all rights reserved. 1 Implementing a graph • If we wanted to program an actual data structure to represent a graph, what information would we need to store? for each vertex? for each edge? 1 2 3 • What kinds of questions would we want to be able to answer quickly: 4 5 6 about a vertex? about edges / neighbors? 7 about paths? about what edges exist in the graph? • We'll explore three common graph implementation strategies: edge list , adjacency list , adjacency matrix 2 Edge list • edge list : An unordered list of all edges in the graph. an array, array list, or linked list • advantages : 1 2 3 easy to loop/iterate over all edges 4 5 6 • disadvantages : hard to quickly tell if an edge 7 exists from vertex A to B hard to quickly find the degree of a vertex (how many edges touch it) 0 1 2 3 4 56 7 8 (1, 2) (1, 4) (1, 7) (2, 3) 2, 5) (3, 6)(4, 7) (5, 6) (6, 7) 3 Graph operations • Using an edge list, how would you find: all neighbors of a given vertex? the degree of a given vertex? whether there is an edge from A to B? 1 2 3 whether there are any loops (self-edges)? • What is the Big-Oh of each operation? 4 5 6 7 0 1 2 3 4 56 7 8 (1, 2) (1, 4) (1, 7) (2, 3) 2, 5) (3, 6)(4, 7) (5, 6) (6, 7) 4 Adjacency matrix • adjacency matrix : An N × N matrix where: the non-diagonal entry a[i,j] is the number of edges joining vertex i and vertex j (or the weight of the edge joining vertex i and vertex j). -
Introduction to Graphs
Multidimensional Arrays & Graphs CMSC 420: Lecture 3 Mini-Review • Abstract Data Types: • Implementations: • List • Linked Lists • Stack • Circularly linked lists • Queue • Doubly linked lists • Deque • XOR Doubly linked lists • Dictionary • Ring buffers • Set • Double stacks • Bit vectors Techniques: Sentinels, Zig-zag scan, link inversion, bit twiddling, self- organizing lists, constant-time initialization Constant-Time Initialization • Design problem: - Suppose you have a long array, most values are 0. - Want constant time access and update - Have as much space as you need. • Create a big array: - a = new int[LARGE_N]; - Too slow: for(i=0; i < LARGE_N; i++) a[i] = 0 • Want to somehow implicitly initialize all values to 0 in constant time... Constant-Time Initialization means unchanged 1 2 6 12 13 Data[] = • Access(i): if (0≤ When[i] < count and Where[When[i]] == i) return Where[] = 6 13 12 Count = 3 Count holds # of elements changed Where holds indices of the changed elements. When[] = 1 3 2 When maps from index i to the time step when item i was first changed. Access(i): if 0 ≤ When[i] < Count and Where[When[i]] == i: return Data[i] else: return DEFAULT Multidimensional Arrays • Often it’s more natural to index data items by keys that have several dimensions. E.g.: • (longitude, latitude) • (row, column) of a matrix • (x,y,z) point in 3d space • Aside: why is a plane “2-dimensional”? Row-major vs. Column-major order • 2-dimensional arrays can be mapped to linear memory in two ways: 1 2 3 4 5 1 2 3 4 5 1 1 2 3 4 5 1 1 5 9 13 17 2 6 7 8 9 10 2 2 6 10 14 18 3 11 12 13 14 15 3 3 7 11 15 19 4 16 17 18 19 20 4 4 8 12 16 20 Row-major order Column-major order Addr(i,j) = Base + 5(i-1) + (j-1) Addr(i,j) = Base + (i-1) + 4(j-1) Row-major vs. -

9 the Graph Data Model
CHAPTER 9 ✦ ✦ ✦ ✦ The Graph Data Model A graph is, in a sense, nothing more than a binary relation. However, it has a powerful visualization as a set of points (called nodes) connected by lines (called edges) or by arrows (called arcs). In this regard, the graph is a generalization of the tree data model that we studied in Chapter 5. Like trees, graphs come in several forms: directed/undirected, and labeled/unlabeled. Also like trees, graphs are useful in a wide spectrum of problems such as com- puting distances, finding circularities in relationships, and determining connectiv- ities. We have already seen graphs used to represent the structure of programs in Chapter 2. Graphs were used in Chapter 7 to represent binary relations and to illustrate certain properties of relations, like commutativity. We shall see graphs used to represent automata in Chapter 10 and to represent electronic circuits in Chapter 13. Several other important applications of graphs are discussed in this chapter. ✦ ✦ ✦ ✦ 9.1 What This Chapter Is About The main topics of this chapter are ✦ The definitions concerning directed and undirected graphs (Sections 9.2 and 9.10). ✦ The two principal data structures for representing graphs: adjacency lists and adjacency matrices (Section 9.3). ✦ An algorithm and data structure for finding the connected components of an undirected graph (Section 9.4). ✦ A technique for finding minimal spanning trees (Section 9.5). ✦ A useful technique for exploring graphs, called “depth-first search” (Section 9.6). 451 452 THE GRAPH DATA MODEL ✦ Applications of depth-first search to test whether a directed graph has a cycle, to find a topological order for acyclic graphs, and to determine whether there is a path from one node to another (Section 9.7). -

Shorter Implicit Representation for Planar Graphs and Bounded Treewidth Graphs
Shorter Implicit Representation for Planar Graphs and Bounded Treewidth Graphs Cyril Gavoille and Arnaud Labourel LaBRI, Universit´e de Bordeaux, France {gavoille,labourel}@labri.fr Abstract. Implicit representation of graphs is a coding of the structure of graphs using distinct labels so that adjacency between any two vertices can be decided by inspecting their labels alone. All previous implicit rep- resentations of planar graphs were based on the classical three forests de- composition technique (a.k.a. Schnyder’s trees), yielding asymptotically toa3logn-bit1 label representation where n is the number of vertices of the graph. We propose a new implicit representation of planar graphs using asymptotically 2 log n-bit labels. As a byproduct we have an explicit construction of a graph with n2+o(1) vertices containing all n-vertex pla- nar graphs as induced subgraph, the best previous size of such induced- universal graph was O(n3). More generally, for graphs excluding a fixed minor, we construct a 2logn + O(log log n) implicit representation. For treewidth-k graphs we give a log n + O(k log log(n/k)) implicit representation, improving the O(k log n) representation of Kannan, Naor and Rudich [18] (STOC ’88). Our representations for planar and treewidth-k graphs are easy to implement, all the labels can be constructed in O(n log n)time,and support constant time adjacency testing. 1 Introduction How to represent a graph in memory is a basic and fundamental data structure question. The two basic ways are adjacency matrices and adjacency lists. The latter representation is space efficient for sparse graphs, but adjacency queries require searching in the list, whereas matrices allow fast queries to the price of a super-linear space. -

List Representation: Adjacency List – N Rows of the Adjacency Matrix Are
List Representation: Adjacency List { n rows of the adjacency matrix are repre- sented as n linked lists { Declare an Array of size n e.g. A[1:::n] of Lists { A[i] is a pointer to the edges in E(G) starting at vertex i. Undirected graph: data in each list cell is a number indicating the adjacent vertex Weighted graph: data in each list cell is a pair (vertex, weight) 1 a b c e a [b,2] [c,6] [e,4] b a b [a,2] c a e d c [a,6] [e,3] [d,1] d c d [c,1] e a c e [a,4] [c,3] Properties: { the degree of any node is the number of elements in the list { O(e) to check for adjacency for e edges. { O(n + e) space for graph with n vertices and e edges. 2 Search and Traversal Techniques Trees and Graphs are models on which algo- rithmic solutions for many problems are con- structed. Traversal: All nodes of a tree/graph are exam- ined/evaluated, e.g. | Evaluate an expression | Locate all the neighbours of a vertex V in a graph Search: only a subset of vertices(nodes) are examined, e.g. | Find the first token of a certain value in an Abstract Syntax Tree. 3 Types of Traversals Binary Tree traversals: | Inorder, Postorder, Preorder General Tree traversals: | With many children at each node Graph Traversals: | With Trees as a special case of a graph 4 Binary Tree Traversal Recall a Binary tree | is a tree structure in which there can be at most two children for each parent | A single node is the root | The nodes without children are leaves | A parent can have a left child (subtree) and a right child (subtree) A node may be a record of information | A node is visited when it is considered in the traversal | Visiting a node may involve computation with one or more of the data fields at the node. -

Package 'Igraph'
Package ‘igraph’ February 28, 2013 Version 0.6.5-1 Date 2013-02-27 Title Network analysis and visualization Author See AUTHORS file. Maintainer Gabor Csardi <[email protected]> Description Routines for simple graphs and network analysis. igraph can handle large graphs very well and provides functions for generating random and regular graphs, graph visualization,centrality indices and much more. Depends stats Imports Matrix Suggests igraphdata, stats4, rgl, tcltk, graph, Matrix, ape, XML,jpeg, png License GPL (>= 2) URL http://igraph.sourceforge.net SystemRequirements gmp, libxml2 NeedsCompilation yes Repository CRAN Date/Publication 2013-02-28 07:57:40 R topics documented: igraph-package . .5 aging.prefatt.game . .8 alpha.centrality . 10 arpack . 11 articulation.points . 15 as.directed . 16 1 2 R topics documented: as.igraph . 18 assortativity . 19 attributes . 21 autocurve.edges . 23 barabasi.game . 24 betweenness . 26 biconnected.components . 28 bipartite.mapping . 29 bipartite.projection . 31 bonpow . 32 canonical.permutation . 34 centralization . 36 cliques . 39 closeness . 40 clusters . 42 cocitation . 43 cohesive.blocks . 44 Combining attributes . 48 communities . 51 community.to.membership . 55 compare.communities . 56 components . 57 constraint . 58 contract.vertices . 59 conversion . 60 conversion between igraph and graphNEL graphs . 62 convex.hull . 63 decompose.graph . 64 degree . 65 degree.sequence.game . 66 dendPlot . 67 dendPlot.communities . 68 dendPlot.igraphHRG . 70 diameter . 72 dominator.tree . 73 Drawing graphs . 74 dyad.census . 80 eccentricity . 81 edge.betweenness.community . 82 edge.connectivity . 84 erdos.renyi.game . 86 evcent . 87 fastgreedy.community . 89 forest.fire.game . 90 get.adjlist . 92 get.edge.ids . 93 get.incidence . 94 get.stochastic .