ST3000 Wheel Drive Autopilot Owner's Handbook
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

ST3000 Wheel Drive Autopilot Owner's Handbook
Distributed by Any reference to Raytheon or RTN in this manual should be interpreted as Raymarine. The names Raytheon and RTN are owned by the Raytheon Company. 81194_1.book Page i Wednesday, July 25, 2001 12:10 PM ST3000 Wheel Drive Autopilot Owner’s Handbook Document number: 81194-1 Date: June 2001 81194_1.book Page ii Wednesday, July 25, 2001 12:10 PM ii ST3000 Wheel Drive Autopilot - Owner’s Handbook Autohelm, HSB (High Speed Bus), SailPilot, SeaTalk and SportPilot are registered trademarks of Raymarine Ltd. Raymarine, AST (Advanced Steering Technology), AutoAdapt, AutoLearn, AutoRelease, AutoSeastate, AutoTack, AutoTrim, FastTrim, GyroPlus, RayGyro, RayPilot and WindTrim are trademarks of Raymarine Ltd. Handbook contents © Raymarine Ltd 2001. 81194_1.book Page iii Wednesday, July 25, 2001 12:10 PM Preface iii Contents Chapter 1: Introduction ............................................................1 1.1 Overview .................................................................................. 1 1.2 Specifications ............................................................................ 3 1.3 About this handbook ................................................................. 4 Important Information .............................................................. 4 Chapter 2: Using the Wheel Pilot .............................................9 2.1 Overview .................................................................................. 9 2.2 Using Auto mode ................................................................... -
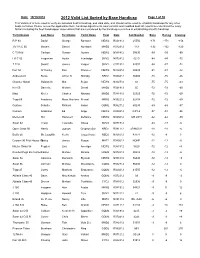
2012 Valid List Sorted by Base Handicap
Date: 10/19/2012 2012 Valid List Sorted by Base Handicap Page 1 of 30 This Valid List is to be used to verify an individual boat's handicap, and valid date, and should not be used to establish handicaps for any other boats not listed. Please review the appilication form, handicap adjustments, boat variants and modified boat list reports to understand the many factors including the fleet handicapper observations that are considered by the handicap committee in establishing a boat's handicap Yacht Design Last Name First Name Yacht Name Fleet Date Sail Number Base Racing Cruising R P 90 David George Rambler NEW2 R021912 25556 -171 -171 -156 J/V I R C 66 Meyers Daniel Numbers MHD2 R012912 119 -132 -132 -120 C T M 66 Carlson Gustav Aurora NEW2 N081412 50095 -99 -99 -90 I R C 52 Fragomen Austin Interlodge SMV2 N072412 5210 -84 -84 -72 T P 52 Swartz James Vesper SMV2 C071912 52007 -84 -87 -72 Farr 50 O' Hanley Ron Privateer NEW2 N072412 50009 -81 -81 -72 Andrews 68 Burke Arthur D Shindig NBD2 R060412 55655 -75 -75 -66 Chantier Naval Goldsmith Mat Sejaa NEW2 N042712 03 -75 -75 -63 Ker 55 Damelio Michael Denali MHD2 R031912 55 -72 -72 -60 Maxi Kiefer Charles Nirvana MHD2 R041812 32323 -72 -72 -60 Tripp 65 Academy Mass Maritime Prevail MRN2 N032212 62408 -72 -72 -60 Custom Schotte Richard Isobel GOM2 R062712 60295 -69 -69 -57 Custom Anderson Ed Angel NEW2 R020312 CAY-2 -57 -51 -36 Merlen 49 Hill Hammett Defiance NEW2 N020812 IVB 4915 -42 -42 -30 Swan 62 Tharp Twanette Glisse SMV2 N071912 -24 -18 -6 Open Class 50 Harris Joseph Gryphon Soloz NBD2 -

“TRILLIUM” Hinckley Pilot 35’ Sloop
YACHTS | CHARTER | SERVICE | BROKERAGE CHARTER LISTING “TRILLIUM” Hinckley Pilot 35’ Sloop ACCOMMODATIONS Trillium is a 35’ sloop that has sleeping accommodations for up to 6 in two cabins. There is a V-Berth forward as well as two transom and two pilot berths in the main salon. The head is equipped with a shower with hot/cold pressurized water. The galley is equipped with an icebox, 3-burner Force 10 propane stove with oven, and an Espar forced air diesel heater for warmth. Trillium is a completely restored classic Pilot. All original hardware has been re-chromed, and her brass is highly polished. Tiller steering enhances her traditional appeal. Her hull has been Awlgripped in Flag Blue with a gold leaf name and hail. ELECTRONICS • Raymarine C90 9” widescreen color radar/chartplotter on swing- out bracket • Standard Horizon VHF • Depthsounder • Speedo/log • 12 volt outlet for cellphone hookup ADDITIONAL EQUIPMENT • Roller furler • Self-tailing primary and secondary winches • Dodger • Propane safety alarm • Boarding ladder • Tiller steering • EPIRB • West Marine RIB inflatable with 4hp Yamaha 4 stroke outboard • The cabin is heated by a (new in 2014) diesel Espar heater • Upgraded electrical system with Lifeline house battery banks and new DC panel simplifying battery usage SAILS PRINCIPAL SPECS • Fully battened main w/ 2 reef points • DESIGNER: Sparkman & Stephens • 135% genoa • LOA: 35’ 9” • LWL: 25’ • Beam: 9’ 6” • Draft: 5’ 0” • Engine: 2015 Yanmar 30 hp diesel • Tankage: 70 gal water; 35 gal fuel CONTACT MICHELLE WHITE Sales & Charter Coordinator [email protected] P: 207.667.8237 C: 207.669.0644 www.morrischarters.com 14 HARBOR DRIVE, NORTHEAST HARBOR, ME 04662 Follow us: . -

Golden Globe Race 2018-19 NOTICE of RACE FEBRUARY 1St, 2018 Summary AMENDMENTS to 1St FEB. 2018
Golden Globe Race 2018-19 NOTICE OF RACE FEBRUARY 1st, 2018 Summary AMENDMENTS to 1st FEB. 2018 The Organiser reserves the right to amend this Notice of Race 2018-19. The text in English language is to be taken as definitive in the event of any jurisdiction or dispute of whatever nature. Managed by Golden Globe Race ltd. © 2014-2022. All rights reserved. 1 DEFINITIONS 6 1.1 Golden Globe 6 1.2 Organiser 6 1.3 Website of the GGR 6 1.4 Host 6 1.5 Notice of Race 6 1.6 Boat 6 1.7 GGR Director 6 1.8 Timetables 7 1.9 Official Sponsors of the Golden Globe 7 1.10 Participant 7 1.10.1 A skipper 7 1.10.2 A Reserve skipper 7 1.10.3 Sponsors 7 1.10.4 Team Manager 7 1.10.5 Shore crew 7 1.10.6 Audio-visual referral agent 8 1.11 GGR Headquarters 8 1.12 Executive Producer 8 1.13 Questions asked by a Skipper or a Team Manager 8 1.14 Routing 8 1.15 Medical service of the GGR 8 1.16 Skipper 8 1.17 Official Notice Board 9 1.18 Contributors 9 1.19 Abbreviations 9 2 THE RACE 10 2.1 Registration 10 2.2 Dates 10 14th June 2017 10 31st January 2018 10 30th March 2018 10 14th APRIL 2018 11 2.3 Number of participants and GGR Number 11 2.4 GGR Entry Fee 12 2.5 GGR Route 12 2.5.1 The Record setting course is around the world east about. -
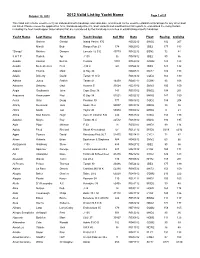
Valid List by Yacht Name Page 1 of 25
October 19, 2012 2012 Valid List by Yacht Name Page 1 of 25 This Valid List is to be used to verify an individual boat's handicap, and valid date, and should not be used to establish a handicaps for any other boat not listed. Please review the appilication form, handicap adjustments, boat variants and modified boat list reports to understand the many factors including the fleet handicapper observations that are considered by the handicap committee in establishing a boat's handicap Yacht Name Last Name First Name Yacht Design Sail Nbr Date Fleet Racing Cruising Gartner Gerald Island Packet 370 R052212 BWS2 192 207 Minelli Bob Ranger Fun 23 174 N062012 JBE2 177 183 "Sloopy" Melcher Dwayne Lacoste 42 S E 40779 R042212 BSN2 72 84 5 H T P Rudich Api J 105 96 R081812 JBE2 90 96 Acadia Keenan Burt H. Custom 1001 R062912 GOM2 123 123 Acadia Biebesheimer Fred J 34 C 69 R052412 JBE2 123 132 Adagio Thuma Mark O Day 30 N040512 MAT2 186 198 Adajio Doherty David Tartan 31 S D R061612 COD2 165 180 Adhara Jones Patrick Tartan 41 14459 R040212 GOM2 93 108 Advance Delaney Ged Avance 33 33524 R021312 SMV2 150 159 Aegis Gaythwaite John Cape Dory 36 141 R051012 BWS2 198 201 Aequoreal Rasmussen Paul O Day 34 51521 R032212 MRN2 147 159 Aerial Gray Doug Pearson 30 777 N061612 COD2 189 204 Affinity Desmond Jack Swan 48-2 50007 R042312 MRN2 33 36 Africa Smith Jud Taylor 45 50974 R030812 MHD2 9 21 Aftica Mac Kenzie Hugh Irwin 31 Citation S D 234 R061512 COD2 183 198 Agadou Mayne Roy Tartan 34 C 22512 R061812 MAN2 180 195 Agila Piper Michael E 33 18 R050912 MHD2 -
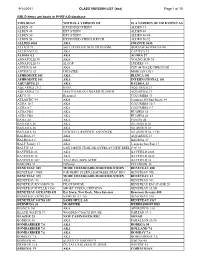
AKA List of Boat Class Version for SP List
9/14/2011 CLASS VERSION LIST (aka) Page 1 of 10 BOLD items are boats in PHRF-LO database THIS BOAT WITH/IS A VERSION OF IS A VERSION OF OR KNOWN AS ALDEN 45 EXTENDED STERN ALDEN 43 ALDEN 48 EXT STERN ALDEN 46 ALDEN 50 EXT STERN ALDEN 46/48 ALDEN 54 EXTENDED STERN, KETCH ALDEN 50/52 ALLIED 3030 AKA CHANCE 3030 ALLIED 39 SKEG RUDDER,NEW TRANSOM BORSAW 40/OWENS 40 ALLMAND 35 AKA CAPTIVA 35 ALOHA 8.2 AKA ALOHA 27 ANNAPOLIS 35 AKA YOUNG SUN 35 ANNAPOLIS 44 SLOOP LUDERS 44 ANTIGUA 44 AKA CSY 44 WALK-THROUGH ANTIGUA 53 UPDATED MORGAN OI51 APHRODITE 101 AKA BIANCA 101 APHRODITE 101 AKA INTERNATIONAL 101 AQUARIUS 23 AKA BALBOA 23 AQUARIUS 23-2 KEEL AQUARIUS 23 AQUARIUS 7.0 MASTHEAD,OUTBOARD RUDDER AQUARIUS 23 ARCO 33 Renamed COLUMBIA 33 ATLANTIC 44 AKA Jeanneau SO/Sun Magic 44 AURA 10.7 AKA COLUMBIA 10.7 AURA 8.7 AKA COLUMBIA 8.7 AURA H35 AKA HUGHES 35 AURA H40 AKA HUGHES 40 BABA 40 AKA PANDA 40 BAHAMA 26 AKA ISLANDER 26 BAHAMA 28 AKA ISLANDER 28 BAHAMA 30 NEW KEEL,RUDDER, AND DECK ISLANDER 30-2 TM BALBOA 23 AKA AQUARIUS 23 BALBOA 8.2 AKA BALBOA 27 BALT Family 17 AKA Jeanneau Sun Fast 17 BALTIC 33 SAIL DRIVE,TEAK DK OVERLAY,NEW KEEL C+C 33 BAYFIELD 25 AKA BAYFIELD 2325 BAYFIELD 32 AKA BAYFIELD 3032 BAYFIELD 32C TALL RIG, BOW SPRIT BAYFIELD 32 BBM IMS 39 IMSized PETERSON 38 BENETEAU 305 MORE FREEBOARD,MODIFIED STERN BENETEAU 30E BENETEAU 30ES IOR SKIRT STERN,LEAD KEEL,FRAC RIG BENETEAU 30E BENETEAU 325 MORE FREEBOARD,MODIFIED STERN BENETEAU 32 BENETEAU 46 AKA BENETEAU 461 BENETEAU EVASION 28 PILOT HOUSE BENETEAU ESCAPADE 28 BENETEAU IDYLLE 1150 -

Hinckley Sail Line Is the Sou’Wester 61
H INCKLEY SAIL THE LAUNCH of a new Sou’wester® is a much-anticipated event along the waterfront of Southwest Harbor, Maine. It marks the end of one journey: within the Hinckley workshops, where she passed through the experienced hands of Hinckley hull makers, carpenters and smiths. It signals the beginning of another: a journey upon the seas, where its competence and composure will be prized both by those who aim to race, and those who wish merely to relax. And with each launch, Henry Hinckley’s legacy of innovation and excellence is renewed. IN THE SEVEN DECADES since “The Yard” was founded, the Hinckley name has come to represent the continual advancement of nautical design and manufacturing. Each new yacht to emerge from Shore Road A TIMELINE OF NAUTICAL INNOVATION. carries with it the Hinckley symbol, Talaria, derived from the wings adorning the ankles of the Roman god, Mercury — a testament to the company’s swift pursuit of superior ideas. 1928 1944 1956 1960 1973 1991 1994 1995 1999 2005 Henry Hinckley Hinckley contributes Hinckley becomes one The Bermuda 40 is Hinckley is one of the Hinckley becomes the After four years Hinckley introduces Hinckley pioneers The art of day sailing is establishes “The Yard” to the war effort, of the first production launched — a masterful early adopters of roller first American builder of tank testing, the the Sou’wester 70, a DualGuard composite advanced to new levels in Southwest Harbor, launching the first of builders to recognize union of new fiberglass furling headsails and to convert entirely to Picnic Boat® sprints up Bruce King design that construction, the of speed and ease with Maine. -

United States Sailing Association Your Passion. Organized. HISTORY OF
United States Sailing Association Your Passion. Organized. HISTORY OF US PHRF® AFFILIATED HANDICAPS 2016 PHRF® is a Registered Trademark of the United States Sailing Association Copyright 2016 United States Sailing Association Box 1260, Portsmouth, RI 02871 www.ussailing.org (401) 683-0800 FAX (401)683-0840 THE UNITED STATES PERFORMANCE HANDICAP RACING FLEET The United States Performance Handicap Racing Fleet (USPHRF) is an empirical handicapping rule administered by a technical rule committee of US Sailing. The USPHRF Committee promotes performance handicap racing for monohull and multihull sail boats applying the PHRF rule. The Committee researches, develops, and distributes guidelines for performance handicapping using systematically applied empirical methodology to determine estimates of speed potential. PHRF Committee Position Address Phone Type Bingman, Bruce Chair 498 Sara Dr. 1 (410) 280-2309 Home Annapolis, MD, 21401 1 (703) 801-4388 Mobile 1 (202) 781-5932 Work Ansfield PhD, Paul J. Vice Chair 1135 Maricopa Dr 1 (920) 233-5782 Fax Oshkosh, WI, 54904-8118 1 (920) 233-5743 Home 1 (920) 312-8185 Mobile Barnes, Tom Member at Large 12470 Country Club Drive 1 (231) 547-5137 Home Charlevoix, MI, 49720 1 (231) 547-1473 Work Bottino MD, Gino C. Member at Large 215 Courtland Ave 1 (914) 646-9200 Mobile Stamford, CT, 06906 1 (914) 241-8866 Work Collins, John J Member at Large 23 Pilgrim Rd 1 (781) 639-1648 Home Marblehead, MA, 01945-1710 Kellner, Bill Member at Large 32331 Stoney Brook Dr 1 (440) 933-9917 Fax Avon Lake, OH, 44012-2136 1 (440) 667-3732 Mobile Kendrick, June Member at Large 11 Anthony Ct 1 (631) 549-4810 Huntington, NY, 11743-1327 1 (631) 673-5781 Home Plant, Robert H Member at Large Stauber, Keith J Member at Large 4139 S Lake Avenue 1 (218) 722-6255 Home Duluth, MN, 55802-2551 1 (218) 390-1776 Mobile Tichenor, James H Member at Large 3827 Del Monte Dr. -

Valid List by Yacht Name Page 1 of 27
September 26, 2004 2004 Valid List by Yacht Name Page 1 of 27 Yacht Name Last Name Yacht Design Sail Nbr Record Date Fleet Racing Cruising CORREIA O DAY MARINER 3181 R041104 MAT U294 U300 MORRIS MORRIS 36 N041204 GOM 117 120 LEAVER J 80 670 N052304 COD 120 126 MOCCIA CATALINA 28 680 N081504 LWK 210 222 49 BENNETT MELGES 24 49 N071204 MHD 102 108 A FRAYED KNOT APPLE CAL 31 85 B060504 PLY 168 183 ABOUT TIME KIVEL BAVARIS 42 42 R051604 COD 105 117 ABRACADABRA KNOWLES J 44 WK 42846 R081504 GOM 36 48 ACADIA KEENAN CUSTOM 1001 R041304 GOM 123 123 ACHIEVER V FLANAGAN J 105 442 R020704 MHD 81 90 ACUSHNET BERRY CAPE DORY 28 R051604 PLY 225 237 ADAGIO FRYE O DAY 25 CB R031404 PTS 246 261 ADDICTED WILCOX MELGES 24 456 R051604 MHD 102 108 ADHARA II NORMAN C&C 34R 43006 R050304 GOM 81 93 ADRENALIN RUSH HARVEY J 24 4139 R052304 JBE 168 174 ADRENALINE KOOPMAN MELGES 24 514 R052304 JBE 102 108 ADVENTURE MALLETT PEARSON 30 14681 R030404 NBD 171 183 ADVENTURE CARY SABRE 30-3 168 R031404 GOM 168 186 AEGIR GIERHART, JR. J 105 51439 R071804 MRN 90 96 AEOLUS MITCHELL CAL 33-2 R022304 MHD 144 156 AEQUOREAL RASMUSSEN O DAY 34 51521 R041904 MRN 147 159 AEROPHILIA BENNER FRERS 33 42328 R020704 MHD 108 120 AFFINITY DESMOND SWAN 48-2 50922 R041104 MRN 36 39 AFFINITY IACONO J 42 50922 R080904 COD 75 75 AFTER YOU MORRIS J 80 261 R031404 GOM 114 123 AFTERGLOW WEG HINCKLEY SW 43TM 43602 R041304 GOM 84 96 AGORA POWERS SHOW 34 50521 R062004 CYC 135 147 AIR EXPRESS GOLDBERG S2 9.1 31753 R052304 JBE 132 144 AIRODOODLE SMITH J 24 2109 R052304 JBE 168 174 AIRTHA SPIECKER -

2011 Valid List by Design, Adjustments
Date: 10/04/2011 2011 Valid List by Design, Adjustments Page 1 of 34 This Valid List is to be used to verify an individual boat's handicap, and valid date, and should not be used to establish handicaps for any other boats not listed. Please review the appilication form, handicap adjustments, boat variants and modified boat list reports to understand the many factors including the fleet handicapper observations that are considered by the handicap committee in establishing a boat's handicap. Design Last Name Yacht Name Record Date Base LP Adj Spin Rig Prop Rec Misc Race Cruise Pomfret Anne R033111 99 +9 108 108 Schoeder Dakota R041211 144 +6 U150 U159 1 D35 Schimenti Zefiro Toma N072611 36 -9 -3 24 42 12 Metre Gregory Valiant R062411 3 3 9 12 Metre Marshall American Eagle N061711 24 24 36 12 Metre Mc Millen 111 Onawa R012811 33 -6 27 33 30 Sq Metre Kilvert Cythera R040111 138 U138 U147 Advance 33 Delaney Ardent N071811 150 150 159 Aerodyne 38 D' Alessandro Alexis R041011 39 39 48 Akilaria Class 40 Davis Amhas R061511 -9 -9 -3 Akilaria Class 40 Dreese Toothface R040511 -9 -9 0 Alberg 35 Krakoff Caper N081511 201 +3 +6 210 225 Alberg 35 Prefontaine Helios R041211 201 -3 198 210 Alberg 37 Case Thisbe N052211 162 +3 165 177 Alberg 37 Kuhl Kemo Sabe R051011 162 +3 165 177 Albin Cumulus Droste Cumulus 3 R030411 189 189 204 Albin Nimbus 42 Nelson Slora Bjomen C091211 99 +9 +6 114 120 Alden 40 Burt, Jr. Gitana R041311 171 171 177 Alden 42 S D S M Vieira Cadence R042011 120 +6 +6 132 144 Alden 44 Flores Checkmate N062811 111 111 123 Alden 45 Davin -

Boat Type Class Base Rating Jib Spin Spin Furl Prop Misc
2019 PHRF / ELI FLEET ROSTER Effective Date: October 2, 2019 BOAT ADJUSTMENTS RATINGS CERT. BOAT NAME NON ROLLER TOTAL SPINNAKER NON-SPINNAKER EXPIRES BOAT NAME SAIL # OWNER(S) BOAT TYPE CLASS BASE RATING JIB SPIN SPIN FURL PROP MISC. ADJUSTMENTS RATING TCF RATING TCF TINKER 77 Acebo Cape Dory 30 Cutter A 207 0 - 21 6 0 - 27 - - 234 0.8403 4/30/2020 TINKER SPINDRIFT 30472 Akan & Morris Tartan 41 C 102 4 - 23 0 0 - 27 - - 129 0.9852 10/6/2019 SPINDRIFT ATHENA D16 Allonby Buzzards Bay 25 Marconi A 183 -1 - 8 0 12 - 19 - - 202 0.7980 4/30/2020 ATHENA SEVENTH HEAVEN 80 Ames Hunter Legend 37 MOD C 114 9 0 20 0 0 -9 0, 29 114 1.0101 143 0.9631 4/30/2020 SEVENTH HEAVEN SIMPATICO 841 Andrews Cape Dory 25 A 255 3 - 19 0 0 22 - - 277 0.7926 4/30/2020 SIMPATICO OPTIMISTIC 148 Archer Alerion Express 28 OD C 180(ODR) 0 - 0 0 0 - 0 - - 180 0.909 4/30/2020 OPTIMISTIC LADIES FIRST 345 Arkell Alerion Express 28 OD C 180 (ODR) 0 - 0 0 0 - 0 - - 180 0.909 4/30/2020 LADIES FIRST CATBIRD SEAT - Baker Nonsuch 26 C 228 - - 0 0 0 1 1 - - 229 0.8463 4/30/2020 CATBIRD SEAT IMPULSE 51469 Baris Sabre 40-2 C 75 3 9 20 - 0 - 12, 23 87 1.0582 98 1.0381 4/30/2020 IMPULSE OMAKAZE 1359 Barron J-70 OD HP-2 117 (ODR) 0 0 21 0 0 - 0, 21 117 1.005 138 0.9709 4/30/2020 OMAKAZE 2nd CHANCE 42482 Bawabe C+C 35-3 C 117 -1 0 21 0 0 - -1, 20 116 1.0067 137 0.9724 10/6/2019 2nd CHANCE GALE FORCE 7 Bockman J-100 MOD HP-1 84 6 0 22 6 0 -11 1, 23 85 1.0619 107 1.0221 4/30/2020 GALE FORCE EXCALIBUR 148 Bortz Catalina 355 WK C 144 3 - 19 6 12 - 40 - - 184 0.9036 4/30/2020 EXCALIBUR BYC -

Good Old Boat Articles by Category
Good Old Boat articles by category Feature boats Cape Dory 30, Number 1, June 1998 Ericson 35, Number 2, Sept. 1998 Niagara 35, Number 3, Nov. 1998 Blackwatch 19, Number 4, Jan. 1999 Baba 30, Number 5, Mar. 1999 Pearson Commander/Ariel, Number 6, May 1999 Block Island 40, Number 7, July 1999 Nicholson 35, Number 8, Sept. 1999 Bayfield 40, Number 9, Nov. 1999 C&C Redwing 30, Number 10, Jan. 2000 Tanzer 22, Number 11, Mar. 2000 Morgan 38, Number 12, May 2000 Classic sailboats (Bermuda 40, Valiant 40, Cherubini 44), Number 12, May 2000 West Wight Potter, Number 13, July 2000 Allied Seabreeze, Number 14, Sept. 2000 Ericson 36C, Number 15, Nov. 2000 Seven Bells (part 1), Number 15, Nov. 2000 Seven Bells (part 2), Number 16, Jan. 2001 Catalina 22, Number 17, Mar. 2001 Cheoy Lee Offshore 40, Number 18, May 2001 Lord Nelson 35, Number 19, July 2001 Tartan 33, Number 20, Sept. 2001 Stone Horse, Number 22, Jan. 2002 Sea Sprite 34, Number 23, Mar. 2002 Sabre 30, Number 24, May 2002 Columbia 28, Number 25, July 2002 Cheoy Lee 35, Number 26, Sept. 2002 Nor'Sea 27, Number 27, Nov. 2002 Allied Seawind 30, Number 28, Jan. 2003 Bristol 24, Number 29, Mar. 2003 Montgomery 23, Number 30, May 2003 Victoria 18, Number 31, July 2003 Bristol 35.5 Number 32, September, 2003 Eastward Ho 31, Number 33, November, 2003 Ericson 29, Number 34, January 2004 Watkins 29, Number 36, May 2004 Spencer 35, Number 38, September 2004 Pacific Seacraft/Crealock 37, Number 39, November 2004 Cheoy Lee 32, Number 40, January 2005 Tayana 37, Number 41, March 2005 Bristol 29.9, Number 43, July 2005 Cape Dory 25, Number 45, November 2005 Lazy Jack 32, Number 46, January 2006 Alberg 30, Number 47, March 2006 Ranger 28, Number 50, September 2006 Allegra 24, Number 51, November 2006 Finisterre's sister, Number 52, January 2007 Islander 30, Number 53, March 2007 Review boats Albin Vega, Number 5, March 1999 Bristol Channel Cutter, Number 6, May 1999 Cal 20, Number 7, July 1999 Contessa 26, Number 8, Sept.