Electro-Hydraulic Servo System
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Hydraulic Motors Catalog
HYDRAULIC MOTORS CATALOG DESIGN MANUFACTURE INTEGRATE 1 877 382-2850 EAGLE-HYDRAULIC.COM 1 OEM HYDRAULIC CYLINDERS 2 STANDARD HYDRAULIC CYLINDERS HYDRAULIC POWER UNITS -AC 3 -DC HYDRAULIC COMPONENTS -Pumps 4 -Motors 5 SYSTEM INTEGRATION 6 NEW: NOVAPEAK TABLE OF CONTENTS EBMM 4 EBMP/ EBMPH/ EBMPW/ EOZ 12 EBMR/ EBMRS/ EBMRWN/ EBMR-BK01/ EOK 39 EBMH 65 EBMSY 75 EBMT/ EBMTE/ EBMTJ/ EBMTS 99 EBMV 123 EBMK2 134 EBMK6 152 EBME2 167 EBMJ 182 EBMER-2/ EBMER-3/ EBMER-4 187 EGM02 GEARMOTOR HIGH SPEED 214 SPEED SENSOR 216 VALVES (CROSSOVER RELIEF/ SWITCH/ OVERCENTER/ COUNTERBALANCE) 217 HYDRAULIC BRAKES EBK10 / EBK2 226 LIMITED WARRANTY 238 HYDRAULIC PRODUCT SAFETY 240 FLUID POWER FORMULAS 241 COMPARISON TABLE 244 EBMM SERIES EBMM series motor is a small volume, economical type, which is designed with shaft distribution flow, which adapts the Gerotor gear set design and provides a compact volume, high power and low weight. FEATURES • Advanced manufacturing devices for the Gerotor gear set, which provide small volume, high efficiency and long life. • Shaft seal can bear high pressure and can be used in parallel or in series. • Advanced construction design, high power and low weight. • Speed sensor available on request. • Internal construction: no bearing, no bushing EBMM - Flange F - Rear Port Max. Inlet Pressure Continuous PSI (bar) 2538 (175) EBMM8-50 Intermittent PSI (bar) 3263 (225) EBMM EBMM EBMM EBMM EBMM EBMM 8 12.5 20 32 40 50 Geometric displacement in3/rev (cm3/rev.) 0.5 (8.2) 0.79 (12.9) 1.21 (19.9) 1.93 (31.6) 2.43 (39.8) 3.07 (50.3) EBMM Continuous (rpm) 1950 1550 1000 630 500 400 Max. -

Accumulator Technology. E 3.000.14/03.16 1
Accumulator Technology. E 3.000.14/03.16 1. HYDAC ACCUMULATOR TECHNOLOGY FLUID ENGINEERING EFFICIENCY VIA ENERGY MANAGEMENT. HYDAC Accumulator Technology has over 50 years' experience in research & development, design and production of Hydac accumulators. Bladder, piston, diaphragm and metal bellows accumulators from HYDAC together form an unbeatable range and as components or units, support hydraulic systems in almost all sectors. The main applications of our accumulators are: z Energy storage, z Emergency and safety functions, z Damping of vibrations, fluctuations, pulsations (pulsation damper), shocks (shock absorber) and noise (silencer), z Suction flow stabilisation, z Media separation, z Volume and leakage oil adjustment, z Weight equalization, z Energy recovery. Using accumulators improves the performance of the whole system and in detail this has the following benefits: z Improvement in the functions z Increase in service life z Reduction in operating and maintenance costs z Reduction in pulsations and noise On the one hand, this means greater safety and comfort for operator and machine. On the other hand, HYDAC accumulators enable efficient working in all applications. 2. QUALITY In conjunction with the customer service department at HYDAC's headquarters, Basic criteria, such as: Quality, safety and reliability are paramount service is possible worldwide. z for all HYDAC accumulator components. Design pressure, HYDAC's worldwide distributor network z Design temperature, They comply with the current regulations means that trained staff are close at hand (or standards) for pressure vessels in the to help our customers. z Fluid displacement volume, individual countries of installation. z Discharge / Charging velocity, In taking delivery of a HYDAC hydraulic z Fluid, accumulator therefore, the customer is This ensures that HYDAC customers have the support of an experienced workforce z Acceptance specifications and also assured of a high-quality accumulator product which can be used in every both before and after sale. -
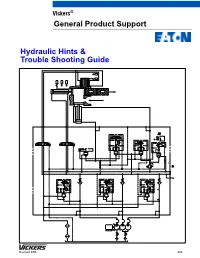
Hydraulic Hints & Trouble Shooting Guide
Vickers® General Product Support Hydraulic Hints & Trouble Shooting Guide Revised 8/96 694 General Hydraulic Hints . 3 Troubleshooting Guide & Maintenance Hints . 4 Chart 1 Excessive Noise . 5 Chart 2 Excessive Heat . 6 Chart 3 Incorrect Flow . 7 Chart 4 Incorrect Pressure . 8 Chart 5 Faulty Operation . 9 Quiet Hydraulics . 10 Contamination Control . 11 Hints on Maintenance of Hydraulic Fluid in the System. 13 Aeration . 14 Leakage Control . 15 Hydraulic Fluid and Temperature Recommendations for Industrial Machinery. 16 Hydraulic Fluid and Temperature Recommendations for Mobile Hydraulic Systems. 19 Oil Viscosity Recommendations . 20 Pump Test Procedure for Evaluation of Antiwear Fluids for Mobile Systems. 21 Oil Flow Velocity in Tubing . 23 Pipe Sizes and Pressure Ratings . 24 Preparation of Pipes, Tubes and Fittings Before Installation in a Hydraulic System. 25 ISO/ANSI Basic Symbols for Fluid Power Equipment and Systems. 26 Conversion Factors . 29 Hydraulic Formulas . 29 2 General Hydraulic Hints Good Assembly Pipes Tubing Do’s And Don’ts Practices Iron and steel pipes were the first kinds Don’t take heavy cuts on thin wall tubing of plumbing used to conduct fluid with a tubing cutter. Use light cuts to Most important – cleanliness. between system components. At prevent deformation of the tube end. If All openings in the reservoir should be present, pipe is the least expensive way the tube end is out or round, a greater to go when assembling a system. possibility of a poor connection exists. sealed after cleaning. Seamless steel pipe is recommended No grinding or welding operations for use in hydraulic systems with the Ream tubing only for removal of burrs. -
A Review of Biological Fluid Power Systems and Their Potential Bionic Applications
The University of Manchester Research A review of biological fluid power systems and their potential bionic applications DOI: 10.1007/s42235-019-0031-6 Document Version Accepted author manuscript Link to publication record in Manchester Research Explorer Citation for published version (APA): Liu, C., Wang, Y., Ren, L., & Ren, L. (2019). A review of biological fluid power systems and their potential bionic applications. Journal of Bionic Engineering. https://doi.org/10.1007/s42235-019-0031-6 Published in: Journal of Bionic Engineering Citing this paper Please note that where the full-text provided on Manchester Research Explorer is the Author Accepted Manuscript or Proof version this may differ from the final Published version. If citing, it is advised that you check and use the publisher's definitive version. General rights Copyright and moral rights for the publications made accessible in the Research Explorer are retained by the authors and/or other copyright owners and it is a condition of accessing publications that users recognise and abide by the legal requirements associated with these rights. Takedown policy If you believe that this document breaches copyright please refer to the University of Manchester’s Takedown Procedures [http://man.ac.uk/04Y6Bo] or contact [email protected] providing relevant details, so we can investigate your claim. Download date:04. Oct. 2021 A review of biological fluid power systems and their potential bionic applications Chunbao Liu1,2, Yingjie Wang 1,2, Luquan Ren 2, Lei Ren2,3 1 School of Mechanical and Aerospace Engineering, Jilin University, Changchun 130022, China 2 Key Laboratory of Bionic Engineering, Ministry of Education, Jilin University, Changchun 130022, China 3 School of Mechanical, Aerospace and Civil Engineering, University of Manchester, Manchester M13 9PL, UK Abstract Nature has always inspired human achievements in industry, and biomimetics is increasingly being applied in fluid power technology. -

Modelling, Testing and Analysis of a Regenerative Hydraulic Shock Absorber System
energies Article Modelling, Testing and Analysis of a Regenerative Hydraulic Shock Absorber System Ruichen Wang *, Fengshou Gu, Robert Cattley and Andrew D. Ball School of Computing and Engineering, University of Huddersfield, Queensgate, Huddersfield HD1 3DH, UK; [email protected] (F.G.); [email protected] (R.C.); [email protected] (A.D.B.) * Correspondence: [email protected]; Tel.: +44-01484-473640 Academic Editor: Paul Stewart Received: 31 March 2016; Accepted: 12 May 2016; Published: 19 May 2016 Abstract: To improve vehicle fuel economy whilst enhancing road handling and ride comfort, power generating suspension systems have recently attracted increased attention in automotive engineering. This paper presents our study of a regenerative hydraulic shock absorber system which converts the oscillatory motion of a vehicle suspension into unidirectional rotary motion of a generator. Firstly a model which takes into account the influences of the dynamics of hydraulic flow, rotational motion and power regeneration is developed. Thereafter the model parameters of fluid bulk modulus, motor efficiencies, viscous friction torque, and voltage and torque constant coefficients are determined based on modelling and experimental studies of a prototype system. The model is then validated under different input excitations and load resistances, obtaining results which show good agreement between prediction and measurement. In particular, the system using piston-rod dimensions of 50–30 mm achieves recoverable power of 260 W with an efficiency of around 40% under sinusoidal excitation of 1 Hz frequency and 25 mm amplitude when the accumulator capacity is set to 0.32 L with the load resistance 20 W. -

Final Report MO-2017-203: Burst Nitrogen Cylinder Causing Fatality, Passenger Cruise Ship Emerald Princess, 9 February 2017
Final report MO-2017-203: Burst nitrogen cylinder causing fatality, passenger cruise ship Emerald Princess, 9 February 2017 The Transport Accident Investigation Commission is an independent Crown entity established to determine the circumstances and causes of accidents and incidents with a view to avoiding similar occurrences in the future. Accordingly it is inappropriate that reports should be used to assign fault or blame or determine liability, since neither the investigation nor the reporting process has been undertaken for that purpose. The Commission may make recommendations to improve transport safety. The cost of implementing any recommendation must always be balanced against its benefits. Such analysis is a matter for the regulator and the industry. These reports may be reprinted in whole or in part without charge, providing acknowledgement is made to the Transport Accident Investigation Commission. Final Report Marine inquiry MO-2017-203 Burst nitrogen cylinder causing fatality, passenger cruise ship Emerald Princess, 9 February 2017 Approved for publication: November 2018 Transport Accident Investigation Commission About the Transport Accident Investigation Commission The Transport Accident Investigation Commission (Commission) is a standing commission of inquiry and an independent Crown entity responsible for inquiring into maritime, aviation and rail accidents and incidents for New Zealand, and co-ordinating and co-operating with other accident investigation organisations overseas. The principal purpose of its inquiries is to determine the circumstances and causes of occurrences with a view to avoiding similar occurrences in the future. Its purpose is not to ascribe blame to any person or agency or to pursue (or to assist an agency to pursue) criminal, civil or regulatory action against a person or agency. -

What Is Hydraulic and Pneumatic System
Module-01 : INTRODUCTION TO HYDRAULIC AND PNEUMATIC SYSTEMS Lecture-01 : What is Hydraulic and Pneumatic System: Fluid power systems use fluids to transmit power and motion. Both liquids and gases are called fluids. Hence both these types of fluids are used in fluid power technology. Under liquids mostly mineral oil with suitable additives are used instead of plain water - (which, however, is used also in some cases) and under gases usually atmospheric air is used after cleaning it suitably. However, synthetic fluids with additives and other gasses are also used for specific purposes, such as fire resistance or the fluid itself is the product- milk as an example. That is the state of art behind these two modern technologies of industrial oil-hydraulics and pneumatics. Fluid power technology actually has a long history behind it. From early days of civilization mankind could feel the existence of power in the water currents of rivers and streams, in ocean waves and in the flowing breeze and in the turbulent storms. Early men could even harness some of these natural sources of energy. Wind energy, for example, was utilized in sailing boats and water current to drive water wheels. Hydroelectric power generation still uses the same idea, of course now-a- days in a much more efficient way. Fluid power technology in its earliest forms mostly took advantage of the motion of fluids or scientifically speaking of its kinetic energy. But the present day oil hydraulics mostly depends on the pressure-energy of the fluids rather than its velocity and in some cases it is even called as hydrostatic transmission of power. -

Handheld Hydraulic Equipment Your Business Is in Good Hands
HANDHELD HYDRAULIC EQUIPMENT YOUR BUSINESS IS IN GOOD HANDS Hydraulics lets you do more in less time. It allows tools to hit harder with less vibration and noise. Hydraulics is simply better. The first time you see a hydraulic horsepower power pack delivers the small enough to fit on a shelf or in breaker you might think it’s nothing same power at the tool tip as a 20 a service van saving you fuel. Two special. It’s compact, quiet and horsepower diesel compressor engine. people can carry the power pack with appears to vibrate less than electric ease. and pneumatic tools. But there’s more In fact, for the price of one compressor to it than meets the eye. and breaker you can buy two If you already use hydraulic tools, you complete hydraulic power pack/ know what you get. If you’re new to When you press the trigger you’ll be breaker packages. And hydraulics hydraulics, you and your business are in for a surprise. Hydraulic oil is a pays even when it’s turned off. The in good hands. powerful energy transmitter. A nine energy efficient power packs are 2 KNOW YOUR HYDRAULICS Here are the essentials on why and when hydraulics is the best choice to get the work done on time and on budget. With just one or two moving parts, Association) standards. That means tools can be connected to a range there’s minimal wear and very few easy, fast and safe connections of different power sources such as parts to replace. -

Introduction to Hydraulic Actuators
Introduction to hydraulic actuators By - Kamalesh 16-11-2012 History and definition Inventor Joseph Bramah of England invented Hydraulic press and was issued a patent on this press in 1795. Pressurized hydraulic fluid used to transfer energy from flow and pressure to drive hydraulic machinery. 01 Principle of hydraulic system Pascal's law is the basis of hydraulic drive systems. 02 Basic hydraulic system Hydraulic jack 03 Hydraulic actuators 1. Hydraulic motors 2. Hydraulic cylinders 04 Hydraulic motors A hydraulic motor is a mechanical actuator that converts hydraulic pressure and flow into torque and angular displacement (rotation). 05 Hydraulic cylinders A Hydraulic cylinder (also called a linear hydraulic motor) is a mechanical actuator that is used to give a unidirectional force through a unidirectional stroke. Single acting vs. double acting 1. Single acting cylinders are economical and the simplest design. Hydraulic fluid enters through a port at one end of the cylinder, which extend the rod by means of area difference. An external force returns or gravity returns the piston rod. 2. Double acting cylinders have a port at each end, supplied with hydraulic fluid for both the retraction and extension. 06 Components of a hydraulic cylinder 1. Cylinder barrel 2. Cylinder base or cap 3. Cylinder head 4. Piston 5. Piston rod 6. Seal gland 7. Seals (nitrile rubber, Polyurethane or Fluorocarbon Viton) 07 Cylinder designs Telescopic cylinder These are multistage cylinders which can fit in the smaller dimensions of machine. Plunger cylinder An hydraulic cylinder without a piston or with a piston without seals is called a plunger cylinder. -

Basic Hydraulics and Components
Pub.ES-100-2 BASIC HYDRAULICSANDCOMPONENTS BASIC HYDRAULICS AND COMPONENTS OIL HYDRAULIC EQUIPMENT ■ Overseas Business Department Hamamatsucho Seiwa Bldg., 4-8, Shiba-Daimon 1-Chome, Minato-ku, Tokyo 105-0012 JAPAN TEL. +81-3-3432-2110 FAX. +81-3-3436-2344 Preface This book provides an introduction to hydraulics for those unfamiliar with hydraulic systems and components, such as new users, novice salespeople, and fresh recruits of hydraulics suppliers. To assist those people to learn hydraulics, this book offers the explanations in a simple way with illustrations, focusing on actual hydraulic applications. The first edition of the book was issued in 1986, and the last edition (Pub. JS-100-1A) was revised in 1995. In the ten years that have passed since then, this book has become partly out-of-date. As hydraulic technologies have advanced in recent years, SI units have become standard in the industrial world, and electro-hydraulic control systems and mechatronics equipment are commercially available. Considering these current circumstances, this book has been wholly revised to include SI units, modify descriptions, and change examples of hydraulic equipment. Conventional hydraulic devices are, however, still used in many hydraulic drive applications and are valuable in providing basic knowledge of hydraulics. Therefore, this edition follows the preceding edition in its general outline and key text. This book principally refers hydraulic products of Yuken Kogyo Co., Ltd. as example, but does mention some products of other companies, with their consent, for reference to equipment that should be understood. We acknowledge courtesy from those companies who have given us support for this textbook. -
Electro-Hydraulic Components and Systems
Hydraulic Systems Volume 2 Electro-Hydraulic Components and Systems Dr. Medhat Kamel Bahr Khalil, Ph.D, CFPHS, CFPAI. Director of Professional Education and Research Development, Applied Technology Center, Milwaukee School of Engineering, Milwaukee, WI, USA. Compu Draulic LLC www.CompuDraulic.com Compu Draulic LLC Hydraulic System Volume 2 Electro-Hydraulic Components and Systems ISBN: 978-0-9977634-2-3 Printed in the United States of America First Published by 2017 Revised by January 2019 All rights reserved for CompuDraulic LLC. 3850 Scenic Way, Franksville, WI, 53126 USA. www.compudraulic.com No part of this book may be reproduced or utilized in any form or by any means, electronic or physical, including photocopying and microfilming, without written permission from CompuDraulic LLC at the address above. Disclaimer It is always advisable to review the relevant standards and the recommendations from the system manufacturer. However, the content of this book provides guidelines based on the author's experience. Any portion of information presented in this book could be not applicable for some applications due to various reasons. Since errors can occur in circuits, tables, and text, the author/publisher assumes no liability for the safe and/or satisfactory operation of any system designed based on the information in this book. The author/publisher does not endorse or recommend any brand name product by including such brand name products in this book. Conversely the author/publisher does not disapprove any brand name product by not including such brand name in this book. The publisher obtained data from catalogs, literatures, and material from hydraulic components and systems manufacturers based on their permissions. -

Offshore Availability for Wind Turbines with a Hydraulic Drive Train
Offshore availability for wind turbines with a hydraulic drive train James Carroll*, Alasdair McDonald †, David McMillan ‡, Julian Feuchtwang • *University of Strathclyde, Scotland. [email protected], †University of Strathclyde, Scotland. [email protected]. ‡University of Strathclyde, Scotland. [email protected]. • University of Strathclyde, Scotland. [email protected] Keywords: Reliability, Availability, Hydraulic, Drive train. a hydraulic drive train using a number of different data sources. Failure rates and repair times will be estimated Abstract through past publications [1] and the use of offshore reliability data from the oil and gas industry [2]. Recent Hydraulic drive trains for wind turbines are under papers [3, 4] that estimate offshore availability include a development by a number of different companies; at least one number of different offshore drive train types but due to the hydraulic drive train is in the final stages of development by a non-availability of data the hydraulic drive train was leading wind turbine manufacturer. Hydraulic drive trains excluded. have a number of advantages such as redundancy, modularity, compactness and track record in other industries. Currently Reference [3] uses a model based on a probabilistic-statistical there are few or no installed wind turbines with hydraulic approach to calculate the turbine access delays caused due to drive trains onshore or offshore. As no data exists on poor sea conditions. Along with estimated failure rates and reliability or failure rates for wind turbines with hydraulic repair times for the hydraulic drive train, this model will be drive trains, this paper estimates failure rates, repair time and used to work out the overall availability for the different drive availability for said turbines.