Decolorize: Fast, Contrast Enhancing, Color to Grayscale Conversion
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Image Processing Terms Used in This Section Working with Different Screen Bit Describes How to Determine the Screen Bit Depth of Your Depths (P
13 Color This section describes the toolbox functions that help you work with color image data. Note that “color” includes shades of gray; therefore much of the discussion in this chapter applies to grayscale images as well as color images. Topics covered include Terminology (p. 13-2) Provides definitions of image processing terms used in this section Working with Different Screen Bit Describes how to determine the screen bit depth of your Depths (p. 13-3) system and provides recommendations if you can change the bit depth Reducing the Number of Colors in an Describes how to use imapprox and rgb2ind to reduce the Image (p. 13-6) number of colors in an image, including information about dithering Converting to Other Color Spaces Defines the concept of image color space and describes (p. 13-15) how to convert images between color spaces 13 Color Terminology An understanding of the following terms will help you to use this chapter. Terms Definitions Approximation The method by which the software chooses replacement colors in the event that direct matches cannot be found. The methods of approximation discussed in this chapter are colormap mapping, uniform quantization, and minimum variance quantization. Indexed image An image whose pixel values are direct indices into an RGB colormap. In MATLAB, an indexed image is represented by an array of class uint8, uint16, or double. The colormap is always an m-by-3 array of class double. We often use the variable name X to represent an indexed image in memory, and map to represent the colormap. Intensity image An image consisting of intensity (grayscale) values. -

CDOT Shaded Color and Grayscale Printing Reference File Management
CDOT Shaded Color and Grayscale Printing This document guides you through the set-up and printing process for shaded color and grayscale Sheet Files. This workflow may be used any time the user wants to highlight specific areas for things such as phasing plans, public meetings, ROW exhibits, etc. Please note that the use of raster images (jpg, bmp, tif, ets.) will dramatically increase the processing time during printing. Reference File Management Adjustments must be made to some of the reference file settings in order to achieve the desired print quality. The settings that need to be changed are the Slot Numbers and the Update Sequence. Slot Numbers are unique identifiers assigned to reference files and can be called out individually or in groups within a pen table for special processing during printing. The Update Sequence determines the order in which files are refreshed on the screen and printed on paper. Reference file Slot Number Categories: 0 = Sheet File (black)(this is the active dgn file.) 1-99 = Proposed Primary Discipline (Black) 100-199 = Existing Topo (light gray) 200-299 = Proposed Other Discipline (dark gray) 300-399 = Color Shaded Areas Note: All data placed in the Sheet File will be printed black. Items to be printed in color should be in their own file. Create a new file using the standard CDOT seed files and reference design elements to create color areas. If printing to a black and white printer all colors will be printed grayscale. Files can still be printed using the default printer drivers and pen tables, however shaded areas will lose their transparency and may print black depending on their level. -

Real-Time Supervised Detection of Pink Areas in Dermoscopic Images of Melanoma: Importance of Color Shades, Texture and Location
Missouri University of Science and Technology Scholars' Mine Electrical and Computer Engineering Faculty Research & Creative Works Electrical and Computer Engineering 01 Nov 2015 Real-Time Supervised Detection of Pink Areas in Dermoscopic Images of Melanoma: Importance of Color Shades, Texture and Location Ravneet Kaur P. P. Albano Justin G. Cole Jason R. Hagerty et. al. For a complete list of authors, see https://scholarsmine.mst.edu/ele_comeng_facwork/3045 Follow this and additional works at: https://scholarsmine.mst.edu/ele_comeng_facwork Part of the Chemistry Commons, and the Electrical and Computer Engineering Commons Recommended Citation R. Kaur et al., "Real-Time Supervised Detection of Pink Areas in Dermoscopic Images of Melanoma: Importance of Color Shades, Texture and Location," Skin Research and Technology, vol. 21, no. 4, pp. 466-473, John Wiley & Sons, Nov 2015. The definitive version is available at https://doi.org/10.1111/srt.12216 This Article - Journal is brought to you for free and open access by Scholars' Mine. It has been accepted for inclusion in Electrical and Computer Engineering Faculty Research & Creative Works by an authorized administrator of Scholars' Mine. This work is protected by U. S. Copyright Law. Unauthorized use including reproduction for redistribution requires the permission of the copyright holder. For more information, please contact [email protected]. Published in final edited form as: Skin Res Technol. 2015 November ; 21(4): 466–473. doi:10.1111/srt.12216. Real-time Supervised Detection of Pink Areas in Dermoscopic Images of Melanoma: Importance of Color Shades, Texture and Location Ravneet Kaur, MS, Department of Electrical and Computer Engineering, Southern Illinois University Edwardsville, Campus Box 1801, Edwardsville, IL 62026-1801, Telephone: 618-210-6223, [email protected] Peter P. -

The Art of Digital Black & White by Jeff Schewe There's Just Something
The Art of Digital Black & White By Jeff Schewe There’s just something magical about watching an image develop on a piece of photo paper in the developer tray…to see the paper go from being just a blank white piece of paper to becoming a photograph is what many photographers think of when they think of Black & White photography. That process of watching the image develop is what got me hooked on photography over 30 years ago and Black & White is where my heart really lives even though I’ve done more color work professionally. I used to have the brown stains on my fingers like any good darkroom tech, but commercially, I turned toward color photography. Later, when going digital, I basically gave up being able to ever achieve what used to be commonplace from the darkroom–until just recently. At about the same time Kodak announced it was going to stop making Black & White photo paper, Epson announced their new line of digital ink jet printers and a new ink, Ultrachrome K3 (3 Blacks- hence the K3), that has given me hope of returning to darkroom quality prints but with a digital printer instead of working in a smelly darkroom environment. Combine the new printers with the power of digital image processing in Adobe Photoshop and the capabilities of recent digital cameras and I think you’ll see a strong trend towards photographers going digital to get the best Black & White prints possible. Making the optimal Black & White print digitally is not simply a click of the shutter and push button printing. -

Accurately Reproducing Pantone Colors on Digital Presses
Accurately Reproducing Pantone Colors on Digital Presses By Anne Howard Graphic Communication Department College of Liberal Arts California Polytechnic State University June 2012 Abstract Anne Howard Graphic Communication Department, June 2012 Advisor: Dr. Xiaoying Rong The purpose of this study was to find out how accurately digital presses reproduce Pantone spot colors. The Pantone Matching System is a printing industry standard for spot colors. Because digital printing is becoming more popular, this study was intended to help designers decide on whether they should print Pantone colors on digital presses and expect to see similar colors on paper as they do on a computer monitor. This study investigated how a Xerox DocuColor 2060, Ricoh Pro C900s, and a Konica Minolta bizhub Press C8000 with default settings could print 45 Pantone colors from the Uncoated Solid color book with only the use of cyan, magenta, yellow and black toner. After creating a profile with a GRACoL target sheet, the 45 colors were printed again, measured and compared to the original Pantone Swatch book. Results from this study showed that the profile helped correct the DocuColor color output, however, the Konica Minolta and Ricoh color outputs generally produced the same as they did without the profile. The Konica Minolta and Ricoh have much newer versions of the EFI Fiery RIPs than the DocuColor so they are more likely to interpret Pantone colors the same way as when a profile is used. If printers are using newer presses, they should expect to see consistent color output of Pantone colors with or without profiles when using default settings. -

Predictability of Spot Color Overprints
Predictability of Spot Color Overprints Robert Chung, Michael Riordan, and Sri Prakhya Rochester Institute of Technology School of Print Media 69 Lomb Memorial Drive, Rochester, NY 14623, USA emails: [email protected], [email protected], [email protected] Keywords spot color, overprint, color management, portability, predictability Abstract Pre-media software packages, e.g., Adobe Illustrator, do amazing things. They give designers endless choices of how line, area, color, and transparency can interact with one another while providing the display that simulates printed results. Most prepress practitioners are thrilled with pre-media software when working with process colors. This research encountered a color management gap in pre-media software’s ability to predict spot color overprint accurately between display and print. In order to understand the problem, this paper (1) describes the concepts of color portability and color predictability in the context of color management, (2) describes an experimental set-up whereby display and print are viewed under bright viewing surround, (3) conducts display-to-print comparison of process color patches, (4) conducts display-to-print comparison of spot color solids, and, finally, (5) conducts display-to-print comparison of spot color overprints. In doing so, this research points out why the display-to-print match works for process colors, and fails for spot color overprints. Like Genie out of the bottle, there is no turning back nor quick fix to reconcile the problem with predictability of spot color overprints in pre-media software for some time to come. 1. Introduction Color portability is a key concept in ICC color management. -
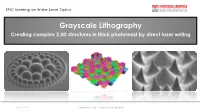
Grayscale Lithography Creating Complex 2.5D Structures in Thick Photoresist by Direct Laser Writing
EPIC Meeting on Wafer Level Optics Grayscale Lithography Creating complex 2.5D structures in thick photoresist by direct laser writing 07/11/2019 Dominique Collé - Grayscale Lithography Heidelberg Instruments in a Nutshell • A world leader in the production of innovative, high- precision maskless aligners and laser lithography systems • Extensive know-how in developing customized photolithography solutions • Providing customer support throughout system’s lifetime • Focus on high quality, high fidelity, high speed, and high precision • More than 200 employees worldwide (and growing fast) • 40 million Euros turnover in 2017 • Founded in 1984 • An installation base of over 800 systems in more than 50 countries • 35 years of experience 07/11/2019 Dominique Collé - Grayscale Lithography Principle of Grayscale Photolithography UV exposure with spatially modulated light intensity After development: the intensity gradient has been transferred into resist topography. Positive photoresist Substrate Afterward, the resist topography can be transfered to a different material: the substrate itself (etching) or a molding material (electroforming, OrmoStamp®). 07/11/2019 Dominique Collé - Grayscale Lithography Applications Microlens arrays Fresnel lenses Diffractive Optical elements • Wavefront sensor • Reduced lens volume • Modified phase profile • Fiber coupling • Mobile devices • Split & shape beam • Light homogenization • Miniature cameras • Complex light patterns 07/11/2019 Dominique Collé - Grayscale Lithography Applications Diffusers & reflectors -

Grayscale Vs. Monochrome Scanning
13615 NE 126th Place #450 Kirkland, WA 98034 USA Website:www.pimage.com Grayscale vs. Monochrome Scanning This document is intended to discuss why it is so important to scan microfilm and microfiche in grayscale and to show the limitations of monochrome scanning. The best analogy for the limitations of monochrome scanning is if you have every tried to photocopy your driver licenses. The picture can go completely black. This is because the copier can only reproduce full black or full white and not gray levels. If you place the copier in photo mode it is able to reproduce shades of gray. Grayscale scanning is analogous to the photo modes setting on your copier. The types of items on microfilm that are difficult to reproduce in monochrome are pencil on a blue form, light signatures, date stamps and embossing. In grayscale these items have a much higher probability to reproduce in the scanned version. Certainly there are instances where filming errors exist and the film is almost pure black or pure white. This can happen if the door to the room was opened during filming, if the canister had light intrusion prior to developing or if the chemicals or temperature were off on the developer. If these are identified the vendor can make a lamp adjustment in these sections of film or if they are frequent and the vendor has the proper cameras, they can scan at a higher bit depth. We have the ability to scan at bit depths higher than 8 bit gray up to 12 bits. 8 bit supports 256 levels of gray, 10bit supports 1024 levels and 12 bit 4096 levels. -

Scanning & Halftones
SCANNING & HALFTONES Ethics It is strongly recommend that you observe the rights of the original artist or publisher of the images you scan. If you plan to use a previously published image, contact the artist or publisher for information on obtaining permission. Scanning an Image Scanning converts a continuous tone image into a bitmap. Original photographic prints and photographic transparencies (slides) are continuous tone. The scanning process captures picture data as pixels. Think of a pixel as one tile in a mosaic. Bitmapped images Three primary pieces of information are relevant to all bitmapped images. 1. Dimensions Example: 2" x 2" 2. Color Mode Example: 256 level grayscale scan 3. Resolution Example: 300 ppi Basic Steps of Scanning 1. Place image on scanner bed Scanning & Halftones 2. Preview the image – click Preview 3. Select area to be scanned – drag a selection rectangle 4. Determine scan resolution (dpi or ppi) 5. Determine mode or pixel depth (grayscale, color, line art) 6. Scale selected area to desired dimensions (% of original) 7. Scan Resolution Resolution is the amount of something. something amount amount over physical distance fabric the number of stitches in fabric the number of stitches per inch in a needlepoint film the amount of grain in film the number of grains in a micro meter in film digital image the number of pixels the number of pixels per inch in a digital image Resolution is a unit of measure: Input Resolution the number of pixels per inch (ppi) of a scanned image or an image captured with a digital camera On Screen Resolution the number of pixels per inch displayed on your computer monitor (ppi or dpi) Output Resolution the number of dots per inch (dpi) printed by the printer (laser printer, ink jet printer, imagesetter) dpi or ppi refer to square pixels per inch of a bitmap file. -

Color Images, Color Spaces and Color Image Processing
color images, color spaces and color image processing Ole-Johan Skrede 08.03.2017 INF2310 - Digital Image Processing Department of Informatics The Faculty of Mathematics and Natural Sciences University of Oslo After original slides by Fritz Albregtsen today’s lecture ∙ Color, color vision and color detection ∙ Color spaces and color models ∙ Transitions between color spaces ∙ Color image display ∙ Look up tables for colors ∙ Color image printing ∙ Pseudocolors and fake colors ∙ Color image processing ∙ Sections in Gonzales & Woods: ∙ 6.1 Color Funcdamentals ∙ 6.2 Color Models ∙ 6.3 Pseudocolor Image Processing ∙ 6.4 Basics of Full-Color Image Processing ∙ 6.5.5 Histogram Processing ∙ 6.6 Smoothing and Sharpening ∙ 6.7 Image Segmentation Based on Color 1 motivation ∙ We can differentiate between thousands of colors ∙ Colors make it easy to distinguish objects ∙ Visually ∙ And digitally ∙ We need to: ∙ Know what color space to use for different tasks ∙ Transit between color spaces ∙ Store color images rationally and compactly ∙ Know techniques for color image printing 2 the color of the light from the sun spectral exitance The light from the sun can be modeled with the spectral exitance of a black surface (the radiant exitance of a surface per unit wavelength) 2πhc2 1 M(λ) = { } : λ5 hc − exp λkT 1 where ∙ h ≈ 6:626 070 04 × 10−34 m2 kg s−1 is the Planck constant. ∙ c = 299 792 458 m s−1 is the speed of light. ∙ λ [m] is the radiation wavelength. ∙ k ≈ 1:380 648 52 × 10−23 m2 kg s−2 K−1 is the Boltzmann constant. T ∙ [K] is the surface temperature of the radiating Figure 1: Spectral exitance of a black body surface for different body. -

2.1 Identity LOGO
2.1 Identity LOGO Primary logo Limited use logos Circle of Trust icon Circle of Trust icon X X X Logotype X X Logotype X X Circle of Trust icon Logotype The proportion and arrangement of components Three logo lockup configurations are available. 0.625 in within the breastcancer.org logo have been The primary logo is the preferred lockup developed for consistent application across all and is to be used on all breastcancer.org breastcancer.org communications. branded materials. Note: The limited use logos are intended for rare Do not retypset, rearrange, or alter the logos situations where the primary logo will in any way. To maintain consistency, use not work, such as very narrow horizontal Smallest acceptable size for the primary logo only approved digital art files. or vertical formats. breastcancer.org guidelines | siegel+gale | November 2007 2.2 Identity CLEAR SPACE 3X 3X 3X 3X 3X 3X X 3X X 2X 3X 2X 2X X 2X Always surround the breastcancer.org logo by Note: the amount of free space specified above. Clear space specifications are provided to help maintain integrity and presence when logos are placed in proximity to competing visual elements. Positioning text, graphic elements, or other logos within the recommended clear space is not acceptable. breastcancer.org guidelines | siegel+gale | November 2007 2.3 Identity COLOR PALETTE BCO Pink BCO Fuschia BCO Soft Yellow BCO Dark Gray BCO Blue Primary colors Spot Uncoated Spot Coated CMYK RGB HTML BCO Pink PANTONE® 205 U PANTONE® 205 C C:0 M:83 Y:17 K:0 R:218 G:72 B:126 DA487E BCO Fuschia PANTONE® 220 U PANTONE® 220 C C:5 M:100 Y:22 K:23 R:163 G:0 B:80 A30050 Secondary colors BCO Soft Yellow PANTONE® 7403 U PANTONE® 7403 C C:0 M:11 Y:51 K:0 R:232 G:206 B:121 E8CE79 BCO Dark Gray PANTONE® Cool gray 9U PANTONE® Cool gray 9C C:0 M:0 Y:0 K:70 R:116 G:118 B:120 747678 BCO Blue PANTONE® 2955 U PANTONE® 2955 C C:100 M:55 Y:10 K:48 R:0 G:60 B:105 003C69 The breastcancer.org color palette comprises two primary colors and three secondary colors. -
![Arxiv:1902.00267V1 [Cs.CV] 1 Feb 2019 Fcmue Iin Oto H Aaesue O Mg Classificat Image Th for in Used Applications Datasets Fundamental the Most of the Most Vision](https://docslib.b-cdn.net/cover/0817/arxiv-1902-00267v1-cs-cv-1-feb-2019-fcmue-iin-oto-h-aaesue-o-mg-classi-cat-image-th-for-in-used-applications-datasets-fundamental-the-most-of-the-most-vision-1150817.webp)
Arxiv:1902.00267V1 [Cs.CV] 1 Feb 2019 Fcmue Iin Oto H Aaesue O Mg Classificat Image Th for in Used Applications Datasets Fundamental the Most of the Most Vision
ColorNet: Investigating the importance of color spaces for image classification⋆ Shreyank N Gowda1 and Chun Yuan2 1 Computer Science Department, Tsinghua University, Beijing 10084, China [email protected] 2 Graduate School at Shenzhen, Tsinghua University, Shenzhen 518055, China [email protected] Abstract. Image classification is a fundamental application in computer vision. Recently, deeper networks and highly connected networks have shown state of the art performance for image classification tasks. Most datasets these days consist of a finite number of color images. These color images are taken as input in the form of RGB images and clas- sification is done without modifying them. We explore the importance of color spaces and show that color spaces (essentially transformations of original RGB images) can significantly affect classification accuracy. Further, we show that certain classes of images are better represented in particular color spaces and for a dataset with a highly varying number of classes such as CIFAR and Imagenet, using a model that considers multi- ple color spaces within the same model gives excellent levels of accuracy. Also, we show that such a model, where the input is preprocessed into multiple color spaces simultaneously, needs far fewer parameters to ob- tain high accuracy for classification. For example, our model with 1.75M parameters significantly outperforms DenseNet 100-12 that has 12M pa- rameters and gives results comparable to Densenet-BC-190-40 that has 25.6M parameters for classification of four competitive image classifica- tion datasets namely: CIFAR-10, CIFAR-100, SVHN and Imagenet. Our model essentially takes an RGB image as input, simultaneously converts the image into 7 different color spaces and uses these as inputs to individ- ual densenets.