Sample Manuscript Showing Specifications and Style
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Xerox Confidentcolor Technology Putting Exacting Control in Your Hands
Xerox FreeFlow® The future-thinking Print Server ConfidentColor Technology print server. Brochure It anticipates your needs. With the FreeFlow Print Server, you’re positioned to not only better meet your customers’ demands today, but to accommodate whatever applications you need to print tomorrow. Add promotional messages to transactional documents. Consolidate your data center and print shop. Expand your color-critical applications. Move files around the world. It’s an investment that allows you to evolve and grow. PDF/X support for graphic arts Color management for applications. transactional applications. With one button, the FreeFlow Print Server If you’re a transactional printer, this is the assures that a PDF/X file runs as intended. So print server for you. It supports color profiles when a customer embeds color-management in an IPDS data stream with AFP Color settings in a file using Adobe® publishing Management—so you can print color with applications, you can run that file with less time confidence. Images and other content can be in prepress and with consistent color. Files can incorporated from a variety of sources and reliably be sent to multiple locations and multiple appropriately rendered for accurate results. And printers with predictable results. when you’re ready to expand into TransPromo applications, it’s ready, too. Xerox ConfidentColor Technology Find out more Putting exacting control To learn more about the FreeFlow Print Server and ConfidentColor Technology, contact your Xerox sales representative or call 1-800-ASK-XEROX. Or visit us online at www.xerox.com/freeflow. in your hands. © 2009 Xerox Corporation. All rights reserved. -

Denver Cmc Photography Section Newsletter
MARCH 2018 DENVER CMC PHOTOGRAPHY SECTION NEWSLETTER Wednesday, March 14 CONNIE RUDD Photography with a Purpose 2018 Monthly Meetings Steering Committee 2nd Wednesday of the month, 7:00 p.m. Frank Burzynski CMC Liaison AMC, 710 10th St. #200, Golden, CO [email protected] $20 Annual Dues Jao van de Lagemaat Education Coordinator Meeting WEDNESDAY, March 14, 7:00 p.m. [email protected] March Meeting Janice Bennett Newsletter and Communication Join us Wednesday, March 14, Coordinator fom 7:00 to 9:00 p.m. for our meeting. [email protected] Ron Hileman CONNIE RUDD Hike and Event Coordinator [email protected] wil present Photography with a Purpose: Conservation Photography that not only Selma Kristel Presentation Coordinator inspires, but can also tip the balance in favor [email protected] of the protection of public lands. Alex Clymer Social Media Coordinator For our meeting on March 14, each member [email protected] may submit two images fom National Parks Mark Haugen anywhere in the country. Facilities Coordinator [email protected] Please submit images to Janice Bennett, CMC Photo Section Email [email protected] by Tuesday, March 13. [email protected] PAGE 1! DENVER CMC PHOTOGRAPHY SECTION MARCH 2018 JOIN US FOR OUR MEETING WEDNESDAY, March 14 Connie Rudd will present Photography with a Purpose: Conservation Photography that not only inspires, but can also tip the balance in favor of the protection of public lands. Please see the next page for more information about Connie Rudd. For our meeting on March 14, each member may submit two images from National Parks anywhere in the country. -

“Digital Single Lens Reflex”
PHOTOGRAPHY GENERIC ELECTIVE SEM-II DSLR stands for “Digital Single Lens Reflex”. In simple language, a DSLR is a digital camera that uses a mirror mechanism to either reflect light from a camera lens to an optical viewfinder (which is an eyepiece on the back of the camera that one looks through to see what they are taking a picture of) or let light fully pass onto the image sensor (which captures the image) by moving the mirror out of the way. Although single lens reflex cameras have been available in various shapes and forms since the 19th century with film as the recording medium, the first commercial digital SLR with an image sensor appeared in 1991. Compared to point-and-shoot and phone cameras, DSLR cameras typically use interchangeable lenses. Take a look at the following image of an SLR cross section (image courtesy of Wikipedia): When you look through a DSLR viewfinder / eyepiece on the back of the camera, whatever you see is passed through the lens attached to the camera, which means that you could be looking at exactly what you are going to capture. Light from the scene you are attempting to capture passes through the lens into a reflex mirror (#2) that sits at a 45 degree angle inside the camera chamber, which then forwards the light vertically to an optical element called a “pentaprism” (#7). The pentaprism then converts the vertical light to horizontal by redirecting the light through two separate mirrors, right into the viewfinder (#8). When you take a picture, the reflex mirror (#2) swings upwards, blocking the vertical pathway and letting the light directly through. -

Digital Holography Using a Laser Pointer and Consumer Digital Camera Report Date: June 22Nd, 2004
Digital Holography using a Laser Pointer and Consumer Digital Camera Report date: June 22nd, 2004 by David Garber, M.E. undergraduate, Johns Hopkins University, [email protected] Available online at http://pegasus.me.jhu.edu/~lefd/shc/LPholo/lphindex.htm Acknowledgements Faculty sponsor: Prof. Joseph Katz, [email protected] Project idea and direction: Dr. Edwin Malkiel, [email protected] Digital holography reconstruction: Jian Sheng, [email protected] Abstract The point of this project was to examine the feasibility of low-cost holography. Can viable holograms be recorded using an ordinary diode laser pointer and a consumer digital camera? How much does it cost? What are the major difficulties? I set up an in-line holographic system and recorded both still images and movies using a $600 Fujifilm Finepix S602Z digital camera and a $10 laser pointer by Lazerpro. Reconstruction of the stills shows clearly that successful holograms can be created with a low-cost optical setup. The movies did not reconstruct, due to compression and very low image resolution. Garber 2 Theoretical Background What is a hologram? The Merriam-Webster dictionary defines a hologram as, “a three-dimensional image reproduced from a pattern of interference produced by a split coherent beam of radiation (as a laser).” Holograms can produce a three-dimensional image, but it is more helpful for our purposes to think of a hologram as a photograph that can be refocused at any depth. So while a photograph taken of two people standing far apart would have one in focus and one blurry, a hologram taken of the same scene could be reconstructed to bring either person into focus. -

Completing a Photography Exhibit Data Tag
Completing a Photography Exhibit Data Tag Current Data Tags are available at: https://unl.box.com/s/1ttnemphrd4szykl5t9xm1ofiezi86js Camera Make & Model: Indicate the brand and model of the camera, such as Google Pixel 2, Nikon Coolpix B500, or Canon EOS Rebel T7. Focus Type: • Fixed Focus means the photographer is not able to adjust the focal point. These cameras tend to have a large depth of field. This might include basic disposable cameras. • Auto Focus means the camera automatically adjusts the optics in the lens to bring the subject into focus. The camera typically selects what to focus on. However, the photographer may also be able to select the focal point using a touch screen for example, but the camera will automatically adjust the lens. This might include digital cameras and mobile device cameras, such as phones and tablets. • Manual Focus allows the photographer to manually adjust and control the lens’ focus by hand, usually by turning the focus ring. Camera Type: Indicate whether the camera is digital or film. (The following Questions are for Unit 2 and 3 exhibitors only.) Did you manually adjust the aperture, shutter speed, or ISO? Indicate whether you adjusted these settings to capture the photo. Note: Regardless of whether or not you adjusted these settings manually, you must still identify the images specific F Stop, Shutter Sped, ISO, and Focal Length settings. “Auto” is not an acceptable answer. Digital cameras automatically record this information for each photo captured. This information, referred to as Metadata, is attached to the image file and goes with it when the image is downloaded to a computer for example. -

Session Outline: History of the Daguerreotype
Fundamentals of the Conservation of Photographs SESSION: History of the Daguerreotype INSTRUCTOR: Grant B. Romer SESSION OUTLINE ABSTRACT The daguerreotype process evolved out of the collaboration of Louis Jacques Mande Daguerre (1787- 1851) and Nicephore Niepce, which began in 1827. During their experiments to invent a commercially viable system of photography a number of photographic processes were evolved which contributed elements that led to the daguerreotype. Following Niepce’s death in 1833, Daguerre continued experimentation and discovered in 1835 the basic principle of the process. Later, investigation of the process by prominent scientists led to important understandings and improvements. By 1843 the process had reached technical perfection and remained the commercially dominant system of photography in the world until the mid-1850’s. The image quality of the fine daguerreotype set the photographic standard and the photographic industry was established around it. The standardized daguerreotype process after 1843 entailed seven essential steps: plate polishing, sensitization, camera exposure, development, fixation, gilding, and drying. The daguerreotype process is explored more fully in the Technical Note: Daguerreotype. The daguerreotype image is seen as a positive to full effect through a combination of the reflection the plate surface and the scattering of light by the imaging particles. Housings exist in great variety of style, usually following the fashion of miniature portrait presentation. The daguerreotype plate is extremely vulnerable to mechanical damage and the deteriorating influences of atmospheric pollutants. Hence, highly colored and obscuring corrosion films are commonly found on daguerreotypes. Many daguerreotypes have been damaged or destroyed by uninformed attempts to wipe these films away. -

Sample Manuscript Showing Specifications and Style
Information capacity: a measure of potential image quality of a digital camera Frédéric Cao 1, Frédéric Guichard, Hervé Hornung DxO Labs, 3 rue Nationale, 92100 Boulogne Billancourt, FRANCE ABSTRACT The aim of the paper is to define an objective measurement for evaluating the performance of a digital camera. The challenge is to mix different flaws involving geometry (as distortion or lateral chromatic aberrations), light (as luminance and color shading), or statistical phenomena (as noise). We introduce the concept of information capacity that accounts for all the main defects than can be observed in digital images, and that can be due either to the optics or to the sensor. The information capacity describes the potential of the camera to produce good images. In particular, digital processing can correct some flaws (like distortion). Our definition of information takes possible correction into account and the fact that processing can neither retrieve lost information nor create some. This paper extends some of our previous work where the information capacity was only defined for RAW sensors. The concept is extended for cameras with optical defects as distortion, lateral and longitudinal chromatic aberration or lens shading. Keywords: digital photography, image quality evaluation, optical aberration, information capacity, camera performance database 1. INTRODUCTION The evaluation of a digital camera is a key factor for customers, whether they are vendors or final customers. It relies on many different factors as the presence or not of some functionalities, ergonomic, price, or image quality. Each separate criterion is itself quite complex to evaluate, and depends on many different factors. The case of image quality is a good illustration of this topic. -
Seeing Like Your Camera ○ My List of Specific Videos I Recommend for Homework I.E
Accessing Lynda.com ● Free to Mason community ● Set your browser to lynda.gmu.edu ○ Log-in using your Mason ID and Password ● Playlists Seeing Like Your Camera ○ My list of specific videos I recommend for homework i.e. pre- and post-session viewing.. PART 2 - FALL 2016 ○ Clicking on the name of the video segment will bring you immediately to Lynda.com (or the login window) Stan Schretter ○ I recommend that you eventually watch the entire video class, since we will only use small segments of each video class [email protected] 1 2 Ways To Take This Course What Creates a Photograph ● Each class will cover on one or two topics in detail ● Light ○ Lynda.com videos cover a lot more material ○ I will email the video playlist and the my charts before each class ● Camera ● My Scale of Value ○ Maximum Benefit: Review Videos Before Class & Attend Lectures ● Composition & Practice after Each Class ○ Less Benefit: Do not look at the Videos; Attend Lectures and ● Camera Setup Practice after Each Class ○ Some Benefit: Look at Videos; Don’t attend Lectures ● Post Processing 3 4 This Course - “The Shot” This Course - “The Shot” ● Camera Setup ○ Exposure ● Light ■ “Proper” Light on the Sensor ■ Depth of Field ■ Stop or Show the Action ● Camera ○ Focus ○ Getting the Color Right ● Composition ■ White Balance ● Composition ● Camera Setup ○ Key Photographic Element(s) ○ Moving The Eye Through The Frame ■ Negative Space ● Post Processing ○ Perspective ○ Story 5 6 Outline of This Class Class Topics PART 1 - Summer 2016 PART 2 - Fall 2016 ● Topic 1 ○ Review of Part 1 ● Increasing Your Vision ● Brief Review of Part 1 ○ Shutter Speed, Aperture, ISO ○ Shutter Speed ● Seeing The Light ○ Composition ○ Aperture ○ Color, dynamic range, ● Topic 2 ○ ISO and White Balance histograms, backlighting, etc. -
Aperture, Exposure, and Equivalent Exposure Aperture
Aperture, Exposure, and Equivalent Exposure Aperture Also known as f-stop Aperture Controls opening’s size during exposure Another term for aperture: f-stop Controls Depth of Field Each full stop on the aperture (f-stop) either doubles or halves the amount of light let into the camera Light is halved this direction Light is doubled this direction The Camera/Eye Comparison Aperture = Camera body = Pupil Shutter = Eyeball Eyelashes Lens Iris diaphragm = Film = Iris Light sensitive retina Aperture and Depth of Field Depth of Field • The zone of sharpness variable by aperture, focal length, or subject distance f/22 f/8 f/4 f/2 Large Depth of Field Shot at f/22 Jacob Blade Shot at f/64 Ansel Adams Shallow Depth of Field Shot at f/4 Keely Nagel Shot at f/5.6 How is a darkroom test strip like a camera’s light meter? They both tell how much light is being allowed into an exposure and help you to pick the correct amount of light using your aperture and proper time (either timer or shutter speed) This is something called Equivalent Exposure Which will be explained now… What we will discuss • Exposure • Equivalent Exposure • Why is equivalent exposure important? Photography – Greek photo = light graphy = writing What is an exposure? Which one is properly exposed and what happened to the others? A B C Under Exposed A Over Exposed B Properly Exposed C Exposure • Combined effect of volume of light hitting the film or sensor and its duration. • Volume is controlled by the aperture (f-stop) • Duration (time) is controlled by the shutter speed Equivalent -

Film Grain, Resolution and Fundamental Film Particles
FFFiiilllmmm GGGrrraaaiiinnn,,, RRReeesssooollluuutttiiiooonnn aaannnddd FFFuuunnndddaaammmeennntttaaalll FFFiiilllmmm PPPaaarrrtttiiicccllleeesss Version 9 March 2006 Tim Vitale © 2006 use by permission only 1 Introduction 1 2 Fundamental Film Particles – Silver-Halide 0.2 - 2.0 um 3 Feature Size and Digital Resolution: Data Table 1 4 Dye Clouds are the Fundamental Particles Color Film 6 3 Film Grain 6 Dye Clouds are the Film Grain in Color Film 6 Film Grain in Black-and-White Film 7 Cross-Section of Film 9 Grain Size Variability 9 RMS Granularity – Film Image Noise 9 RMS Granularity of Several Films: Data Table 2 10 Film Resolution – Sharpness 10 System Resolving Power Equation 12 Lens Issues Effecting Resolution 12 Film Issues Effecting Resolution 12 Evaluation a System: Camera, Lens and Film 13 Selected Film & Lens Resolution Data: Data Table 3 13 Camera System Resolving Power: Data Table 4 14 Measuring Film Grain 14 Print Grain Index 14 Size of Perceived Film Grain: Example 15 Size Domains for Enlargement & Magnification: Data Table 5 15 Maximum Resolution of a Microscope: Data Table 6 16 4 Eliminating Film Grain from an Image 18 Drum Scan Aperture 18 Feature size vs. Digital Resolution vs. Film: Data Table 7 19 Scan Resolution in Flatbed Scanning 19 Wet Mounting for Film Scanning 20 New Generation of Flatbed Scanners 21 Future Generation of Scanners – Epson Perfection V750-M 23 Software for Diminishing Film Grain 24 1 Introduction The purpose of this complex essay is to demonstrate the following: • Fundamental film particles (silver -
1.1 Introduction to the Digital Systems
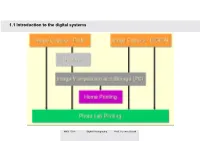
1.1 Introduction to the digital systems PHO 130 F Digital Photography Prof. Lorenzo Guasti How a DSLR work and why we call a camera “reflex” The heart of all digital cameras is of course the digital imaging sensor. It is the component that converts the light coming from the subject you are photographing into an electronic signal, and ultimately into the digital photograph that you can view or print PHO 130 F Digital Photography Prof. Lorenzo Guasti Although they all perform the same task and operate in broadly the same way, there are in fact th- ree different types of sensor in common use today. The first one is the CCD, or Charge Coupled Device. CCDs have been around since the 1960s, and have become very advanced, however they can be slower to operate than other types of sensor. The main alternative to CCD is the CMOS, or Complimentary Metal-Oxide Semiconductor sen- sor. The main proponent of this technology being Canon, which uses it in its EOS range of digital SLR cameras. CMOS sensors have some of the signal processing transistors mounted alongside the sensor cell, so they operate more quickly and can be cheaper to make. A third but less common type of sensor is the revolutionary Foveon X3, which offers a number of advantages over conventional sensors but is so far only found in Sigma’s range of digital SLRs and its forthcoming DP1 compact camera. I’ll explain the X3 sensor after I’ve explained how the other two types work. PHO 130 F Digital Photography Prof. -

Diy Photography & Jr: Photographic Stickers
1 DIY PHOTOGRAPHY & JR: PHOTOGRAPHIC STICKERS For grade levels 3-12 Developed by: PEITER GRIGA The world now contains more photographs than bricks, and they are, astonishingly, all different. - John Szarkowski Are images the spine and rib cage of our society or are we so saturated in photography that we forget the underlying messages we ‘read’ from images? Are we protected/ supported by images or flooded by them? JR’s work elaborates on the idea of how we value images by demonstrating our likenesses and differences. This dichotomy is so great in his work; JR can eliminate himself as the artist, becoming the egoless ‘guide.’ As part of his Inside Out Project he allows people from all around the world to send him pictures they take of themselves, which he then prints out a poster sized image and returns to the image maker, who then selects a location and hangs the work in a public space. In a traditional sense, he hands the artistic power over to the participant and only controls the printing and specs for the images. The CAC participated in the Inside Out Project as early as 2011, but most recently through installations in Fountain Square, Rabbit Hash, KY, Findlay Market, and inside the CAC Lobby. The power of the image and the location of the image are vital aspects of JR’s site-specific work. Building upon these two factors is the material used to place the image in the public space. His materials usually include wheat paste, paper, and a large scale digitally printed image.