Automatic Power Factor Correction
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Network & Wireless
NETWORK & WIRELESS HUMIDITY & WIRELESS Kele Has Doubled the Offering of Network and Wireless Solutions, NETWORK and Continues to Add to Our Options to Meet Your Needs. Babel Buster | p. 719 L-VIS Series | p. 721 BASRT-B | p. 727 Series 110A | p. 733 ValuPoint VP4-23 | p. 744 EKI Series | p. 738 Series NETWORK & WIRELESS Products manufactured MODEL/SERIES PAGE in the United States Network Display and Control Panels Wireless EnOcean and ZigBee Devices L-VIS Series — BACnet and LON Touch Panel . 721 and Systems (cont.) Products that are BBC-SD — BACnet Graphic Display . 724 E3T-SxE Series — EnOcean Wireless European new to the catalog WebOP Series — Touchscreen Operator Display Light Switches . 826 Panel . 725 E3T-S2H Series — EnOcean Wireless Handheld Remote . 827 Network Gateways EasySens Thanos — EnOcean Room Operating ETH-1000 — Provides connectivity between Ethernet Panel . .. 830 and RS-485 based networks . 713 EasySens Receiver Gateways — EnOcean Receiver XLTR-1000 — Provides Connectivity Between Two Gateways . 831 Rs-485 Based Networks . 714 EasySens SRC Receiver Controllers — EnOcean Raptor Protocol Converter — RLE Technologies Receiver Controllers . 832 Protocol Coverter . 715 EasySens Repeater — EnOcean Wireless LGATE-9xx Series — Lonworks/Bacnet And Repeater . 833 Universal Gateways . 717 EasySens Switches — EnOcean Lighting, Blinds Babel Buster Series — BACnet - Modbus - SNMP and Shutters Switches . 834 Gateways . 719 EasySens Specialty Wireless Transmitters — AddMe® Series — BACnet - Modbus Network I/O . 743 EnOcean Remote Control, Key Card Switch, Window/Door Contact . 835 Network I/O Modules EasySens Room Sensors — EnOcean Temperature, Humidity and CO2 Sensors . 836 L-IOB Series — BACnet and LON I/O Module . 739 EasySens Temperature Sensors — EnOcean i.CanDoIt Series — Embedded Network Servers 742 Surface, Duct, Remote and Outdoor AddMe® Series — BACnet - Modbus Network I/O . -

CASAMBI ® – Light Gets Smart
www.rp-group.com LIGHT GETS SMART. INTELLIGENT LIGHT MANAGEMENT BY APP. INSIDE 2 · CASAMBI INSIDE CONTENTS Benefits at a glance 2 What can CASAMBI do 3 Light gets smart 4 Functions of the app 6 Gestures 8 iBeacon technology 8 CASAMBI for Hue 8 Security 9 Switching principle 11 The mesh network 11 CBU-ASD module 12 CBU-DCS DALI Controller 14 CBU-TED module 15 PWM4 module 16 CASA ROLLO Roller Shutter Control & CASA RELAIS Control for ohmic consumers 18 LED Power Converter CASAMBI V2 20 LED Power Converter CASAMBI V2 PWM300 21 LED Converter with Bluetooth controller 22 CBU-BOX 23 XPRESS wireless light switch 24 Push button interface 25 CASA BULB E27 illuminant 26 Panels 28 LAVA free-standing luminaire 36 Exterior façade and ceiling luminaires 37 CANTONE downlight 38 Moisture-proof diffuser luminaires 40 High-bay luminaire 42 Floodlight 44 LED strips 46 Motion detectors 48 Legend 55 BENEFITS AT A GLANCE Fantastic features Quick to connect • Intelligent timer to control your luminaires • No additional antennae are required • Groups of luminaires and lighting scenes • Quick to connect thanks to Bluetooth Low Energy • Luminaires and modules form a network and commu- Straightforward and flexible nicate with each other • No extra cables • No central unit required • Flexible to extend Simple and user friendly Small and space saving • Straightforward configuration • Compact modules for wall or ceiling mounting • User-friendly software CASAMBI INSIDE · 3 WHAT CAN CASAMBI DO? CASAMBI is the simplest and most natural way of control- Use your conventional light switches to revert to the light- ling your LED luminaires. -

Mx-USR-L1PWM Lighting Control Module
Mx-USR-L1PWM Lighting Control Module Features Product • Full range dimming for advanced daylighting control Image • Zero crossing activation determined by user • Serves as level 1 or level 2 wireless repeater • Built in Dawn Control • Adjustable ramping speed/rate of dimming • Advanced options configured using MES provided airConfig software tool download.magnumes.net( ) *PATENT PENDING Product Description Overview The Mx-USR-L1PWM Lighting Control Module responds to a variety of wireless EnOcean devices to control and dim LED drivers, fluorescent ballasts, or other switchable loads. The Mx-USR-L1PWM offers bi-directional, ON/OFF and PWM dimming control when combined with a wireless light switch or automatic shut-off when combined with a wireless occupancy sensor. Additionally, the Lighting Control Module can perform occupancy-based setback dimming and self-contained daylight harvesting functions. The Mx-USR- L1PWM can be paired to compatible devices manually and for more sophisticated configuration, the MES software tool airConfig is available for download at download.magnumes.net. Operation Applications The Mx-USR-L1 operates on 100 to 277 VAC The Mx-USR-L1PWM is ideal for single or and includes one relay to switch up to 20A and multiple fixtures on/off or dimming control one PWM output for control of dimmable loads, applications. This device is appropriate for including electronic ballasts. The Mx-USR-L1PWM new construction as well as retrofit, including receives signals from wireless sensors, switches commercial offices, conference -

Single Or Dual Rocker Self-Powered Wireless Light Switch Cat
Single or Dual Rocker Self-powered Wireless Light Switch Cat. Nos. WSS0S-x9x DI-17X-WSS0S-00A INSTALLATION English WARNINGS AND CAUTIONS: • TO BE INSTALLED AND/OR USED IN ACCORDANCE WITH APPROPRIATE ELECTRICAL CODES AND REGULATIONS. • IF YOU ARE NOT SURE ABOUT ANY PART OF THESE INSTRUCTIONS, CONSULT AN ELECTRICIAN. DESCRIPTION: The Single or Dual Rocker Self-Powered Wireless Light Switch is a battery-free wireless transmitter that communicates with a wide variety of receivers. Every time the switch is pressed a micro-generator produces a small electrical current that powers a built-in transmitter. This transmitter sends wireless signals that command the receiver to turn a device off or on. With an appropriate receiver, the switch can also be used to control the dimming of lights. COMPATIBLE DEVICES: • 3-Wire Relay • 5-Wire Relay SPECIFICATIONS • Plug-in Dimmer/Relay • 4-Channel Low Voltage Receiver • Room Controller • Thermostat • More receivers available EQUIPMENT NEEDED FOR INSTALLATION • Slotted Screwdriver • Phillips screwdriver WSS0S-S9x WSS0S-D9x • Double sided foam mounting tape (for adhesive mounting) • Plastic wall anchors and screws (for screw mounting) Range 50-150 feet (typical) PROGRAMMING AND ACTIVATION: Frequency 902 MHz 1. Do not mount the switch until after it has been programmed to communicate Power Supply Self-generated when switch is pressed with all appropriate receivers. Test the range of the wireless light switch before mounting. Channels 2 Buttons (1 Rocker) 4 buttons (2 rockers) 2. Make sure the switch is within 16 feet (5 meters) of the desired receiver Output when programming. Receivers have reduced range during programming. Only limited by number of receivers in range Channels 3. -

Installation Guide
Equipment Needed for Installation ■ Slotted screwdriver Specifications Installation Guide ■ Phillips screwdriver ■ Double sided foam mounting tape (for adhesive mounting) ■ Plastic wall anchors and screws (for screw mounting) ExT-S1Axx ExT-S2Axx ExT-S1AWH (White) Range 50-150 feet (typical) ExT-S1AIV (Ivory) Single or Dual Rocker Linking Frequency 315 MHz, 868 MHz, 902 MHz ExT-S1ALA (Light Almond) Self-powered Wireless (link switches to receivers) Power Supply Self-generated when switch is pressed ExT-S1ABK (Black) Light Switch Buttons 2 Buttons (1 rocker) 4 Buttons (2 rockers) ExT-S1ABR (Brown) Step 1: Do not mount the switch until after it has been linked to all appropriate ExT-S1AGY (Gray) receivers. Test the range of the wireless light switch before mounting. Output Channels Only limited by number of receivers in range ExT-S2AWH (White) Step 2: Make sure the switch is within 16 feet (5 meters) of the desired Dimensions 2.75 (W) x 4.5 (H) x 0.62 (D) inches receiver when linking. Receivers have reduced range during link mode. ExT-S2AIV (Ivory) Radio Certification FCC (US): SZV-PTM200C, SZV-PTM210C or SZV-PTM210U ExT-S2ALA (Light Almond) Step 3: Linking: To link a wireless light switch with a receiver, simply press the IC (Canada): 5713-PTM200C, 5713-PTM210C or 5713-PTM210U rocker of the wireless light switch while the receiver is in the desired Link ExT-S2ABK (Black) Mode (see receiver instructions for information on how to link the receiver- Addressing Factory set unique ID (1 of 4 billion) ExT-S2ABR (Brown) -some receivers require triple press for linking). -

Our Products
Our Products Inductive sensors 8 Solid state relays 100 Capacitive sensors 32 Solid state relays accessories 130 Conductive sensors 44 Soft starters 133 Ultrasonic sensors 48 Motor protection relays 138 Photoelectric sensors 52 Variable speed drives 140 Motion and presence sensors 77 Limit switches 144 Light curtains for lift and doors 79 Electromechanical relays 152 Magnetic sensors 82 Sockets and modules 155 Intrinsic safety 89 Safety magnetic sensors 90 Safety light curtains 91 Environmental sensors 93 Monitoring relays 158 Dupline® General purpose 224 Timers 169 Dupline® DuplineSafe 237 Current transformers 175 Dupline® Irrigation 239 Accessories and transducer 183 Dupline® Elevator 240 Digital panel meters 184 Dupline® Parking guidance system 243 Energy management 188 Dupline® Home and Building automation 246 Energy monitoring solution 197 PV monitoring solution 199 Counters 205 PID controllers 208 Switching power supplies 210 Safety modules 216 Configurable modular safety module 220 A complete product range ABOUT CARLO GAVAZZI Our core competence in automation spans four product lines: Sense, Switch, Control and Fieldbus. Carlo Gavazzi Automation is a multinational electronics group active in the design, manufacture and marketing Our wide array of products includes sensors, solid state of electronic equipment targeted at the global markets of relays, electronic motor controllers, monitoring relays, timers, industrial and building automation. energy management equipment, PV monitoring solution and fieldbus systems. Our history is full of firsts and our products are installed in a huge number of applications all over the world. With more We focus our expertise on offering state-of-the-art product than 80 years of successful operation, our experience is solutions in selected market segments. -

Intelligent Tyre Systems – State of the Art and Potential Technologies Deliverable D7
APOLLO IST-2001-34372 Intelligent Tyre for Accident-free Traffic Intelligent Tyre Systems – State of the Art and Potential Technologies Deliverable D7 Report Version: 1 Report Preparation Date: 22.05.2003 Classification: Public Contract Start Date: 01.03.2002 Duration: 36 months Project Co-ordinator: Technical Research Centre of Finland (VTT) FI Partners: DaimlerChrysler AG (DC AG) D Helsinki University of Technology (HUT) FI Rheinisch Westfälische Technische Hochschule Aachen (RWTH Aachen) D IXFIN Magneti Marelli Sistemi Elettronici S.p.A (MM) I Nokian Tyres plc (NR) FI Pirelli Pneumatici SPA (PIRELLI) I Project funded by the European Community under the “Information Society Technology” Programme (1998-2002) APOLLO Intelligent Tyre for Accident-free Traffic Deliverable D7 Intelligent Tyre Systems – State of the Art and Potential Technologies _____________________________________________________________________________ DELIVERABLES SUMMARY SHEET Project Number: IST-2001-34372 Project Acronym: APOLLO Title: Intelligent Tyre for Accident-free Traffic Deliverable N°: D7 Due date: 31.12.2002 Delivery Date: 22.05.2003 Short Description: Intelligent Tyre Systems – State of the Art and Potential Technologies This document provides an overview on the state of the art of intelligent tyre systems and potential technologies that can be utilised for sensors, wireless data transmission, and batteryless power supply. An accident analysis with an investigation of tyre-related risk factors shows the great benefit of the envisaged system to improve traffic safety. This fits to visions and strategies of vehicle manufacturers, automotive suppliers and tyre manufactures in respect to intelligent tyre/wheel systems that are summarised. The first products that have been introduced in the field of intelligent tyres are Tyre Pressure Monitoring Systems (TPMS). -

Ext-Sxaxx Ds.Pdf
Single Rocker Dual Rocker Self-powered Wireless Self-powered Wireless Light Switch Light Switch ExT-S1AWH (White) ExT-S1ABR (Brown) ExT-S2AWH (White) ExT-S2ABR (Brown) ExT-S1ALA (Light Almond) ExT-S1ABK (Black) ExT-S2ALA (Light Almond) ExT-S2ABK (Black) ExT-S1AIV (Ivory) ExT-S1AGY (Gray) ExT-S2AIV (Ivory) ExT-S2AGY (Gray) ExT: E3T=315 MHz, E8T=868 MHz, E9T=915 MHz ILLUMRATM self-powered light switches Simple Wireless Control use no wires or batteries. Pressing the switch ■ Mount switches anywhere creates the energy to transmit a wireless ■ Create 3-way and 4-way switches signal that controls lights or other devices ■ Control lights, motors, or other electrical loads connected to EnOcean receivers. ■ Reconfigure or relocate as needed Easy-To-Use ■ Installs in minutes Control The Way You Want It ■ Use with any line voltage or low voltage ILLUMRA receivers ■ Requires no wiring ■ Control an unlimited number of ■ Easy to configure EnOcean receivers within range ■ Communicates with EnOcean receivers ■ Experience wireless dimming or ON/OFF control Reliable Range ■ Maintenance-free operation for 20+ years ■ 50-150 foot operating range (typical) Available Colors: ■ Unique ID of each switch activates only the intended reciever(s) Save Time and Money White Light Almond Ivory Gray Brown Black Avoid costly and time-consuming installation of hardwire switches by choosing ILLUMRA ExT-S1Axx ExT-S2Axx wireless switches and receivers. Installing a Range 50-150 feet (typical) switch doesn’t have to mean tearing open a Frequency 315, 868 or 902 MHz wall. Power Supply Self-generated when switch is pressed Save Energy Buttons 2 Buttons (1 rocker) 4 Buttons (2 rockers) Save energy and money by creating Manual Output Channels Only limited by number of receivers in range ON / Auto OFF controls using ILLUMRA Dimensions 2.75 (W) x 4.5 (H) x 0.62 (D) inches switches and occupancy sensors or by Radio Certification FCC (United States): SZV-PTM200C, 210C or 210U programming all lights to respond to a single I.C. -

Power Module Dc-Dc Converter Peking P.R
Technical Data Sheet POWER MODULE DC-DC CONVERTER PEKING P.R. CHINA ORIGIN PAGE 1 of 21 VD 10 - 12 S 12 ① ② ③ ④ ⑤ Ready products ➀ Series №: VD ➁ Output Power: 10W ➂ Input Voltage: 12Vdc (12V 24V 48V 110V) ➃ Output Mode: S=Single D=Dual T=Triple ⑤ Output Voltage: 12Vdc (2.5V 3.3V 5V 12V 15V 24V 48V) SECTION 1 Product Advantage PAGE 3 SECTION 2 Product Performance PAGE 4 SECTION 3 Product Function PAGE 5 SECTION 4 Catalogue PAGE 6-7 SECTION 5 Product Specification PAGE 8-10 SECTION 6 Production System PAGE 11-12 SECTION 7 Raw Material PAGE 13 SECTION 8 Application PAGE 14-17 SECTION 9 Shipping Information PAGE 18 SECTION 10 Cooperation International PAGE 19 SECTION 11 Product Exhibition Since 2005 PAGE 20-21 PAGE 2 of 21 SECTION 1 Product Advantage VD10-12S12 [1] Quality conform to ISO 9001:2008 and AS9100 certifications. [2] Quality approved by GE, PHIPS, OSRAM, TDK, FDK and OTIS. [3] Int’L safety at UL, IEC,CUL, VDE, RoHS, FCC, CCC, Directive-compliant and CE standards. [4] High quality raw materials. Imported cores (Magnets, TDK, Epcos, Ferroxcube, CSC...). [5] Premium Electron components. [6] Original manufacturers P.R.C. direct export. [7] All green products. [8] 50K pieces monthly. [9] Short lead time. About 30-60 working days. [10] Small order acceptable. [11] Samples available. [12] Strong & Safe packages international export standard. Anti-static. [13] Comprehensive tests before delivery packages included. 1) 100% aging test for all products. 2) 100% full load burn-in test. 3) Product reliability testing. 4) Thermal design, strong impact test. -
Carlo Gavazzi Catalogue
Our Products Inductive sensors 8 Solid state relays 104 Capacitive sensors 32 Solid state relays accessories 134 Photoelectric sensors 46 Soft starters 139 Photoelectric sensors accessories 69 Motor protection relays 143 Conductive sensors 72 Variable speed drives 145 Magnetic sensors 76 Limit switches 149 Ultrasonic sensors 83 Electromechanical relays 158 Motion and presence sensors 90 Sockets for electromechanical relays 161 Environmental sensors 92 Intrinsic safety 96 Safety light curtains 97 Safety magnetic sensors 99 Connectors and brackets 100 Energy management 164 Dupline® Home and Building automation 236 Current transformers 176 Dupline® Parking guidance system 251 Energy monitoring solution 184 Dupline® DuplineSafe 255 PV monitoring solution 187 Dupline® Industrial 257 Monitoring relays 192 Dupline® Irrigation 270 Timers 204 Dupline® Elevator 271 Counters 209 Surge arresters 212 Digital panel meters 214 Converters and Gateway 218 Safety modules 219 Configurable safety modules 223 Switching power supplies 225 A complete product range ABOUT CARLO GAVAZZI Our core competence in automation spans four product lines: Sensors, Switches, Controls and Fieldbuses. Carlo Gavazzi Automation is a multinational electronics group active in the design, manufacture and marketing Our wide array of products includes sensors, monitoring of electronic equipment targeted at the global markets of relays, timers, energy management systems, solid state industrial and building automation. relays, safety devices and fieldbus systems. Our history is full of firsts and our products are installed in a We focus our expertise on offering state-of-the-art product huge number of applications all over the world. With more solutions in selected market segments. than 80 years of successful operation, our experience is unparalleled. -
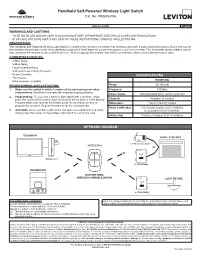
Handheld Self-Powered Wireless Light Switch Cat
Handheld Self-Powered Wireless Light Switch Cat. No. WSS0S-R0x INSTALLATION English WARNINGS AND CAUTIONS: • TO BE INSTALLED AND/OR USED IN ACCORDANCE WITH APPROPRIATE ELECTRICAL CODES AND REGULATIONS. • IF YOU ARE NOT SURE ABOUT ANY PART OF THESE INSTRUCTIONS, CONSULT AN ELECTRICIAN. DESCRIPTION: The Handheld Self-Powered Wireless Light Switch is a battery-free wireless transmitter that communicates with a wide variety of receivers. Every time one of the switches are pressed a small micro-generator produces a small electrical current that powers a built-in transmitter. This transmitter sends wireless signals that command the receiver to turn a device off or on. With an appropriate receiver, the switch can even be used to control the dimming of lights. CompatiBLE DEVICES: • 3-Wire Relay • 5-Wire Relay • Plug-in Dimmer/Relay • 4-Channel Low Voltage Receiver • Room Controller Specifications • Thermostat WSS0S-R0x • More receivers available PROGRAMMING AND ACTIVation: Range 50-150 feet 1. Make sure the switch is within 5 meters of the desired receiver when Frequency 315 MHz programming. Receivers have reduced range during programming. Power Supply Self-generated when switch is pressed 2. Programming: To associate a wireless light switch with a receiver, simply press the rocker of the wireless light switch while the receiver is in the desired Channels 4 buttons (2 rockers) Program Mode (see receiver installation guide for information on how to Dimensions 1.85 x 3.15 x 0.7 inches program the receiver). Repeat this process for the second rocker. Radio Certification FCC (United States) SZV-TCM2XXC 3. Activation: Once a wireless light switch has been associated with a receiver, IC (Canada) 5731A-TCM2XXC simply press the rocker on the wireless light switch to control the load. -

TSLED24 SERIES the TSLED Series of Specification Grade Luminarie IS Designed for Quality Illumination
PAGE 1 OF 4 MODEL: TYPE PROJECT: PREPARED BY: DATE: TSLED24 SERIES The TSLED series of specification grade luminarie IS designed for quality illumination. The 4” deep housing allows for optimal light distribution and maximized fixture performance. FEATURES AND SPECIFICATIONS INTENDED USE: DIMMING: The TSLED24 Series LED recessed troffer provides all of the great benefits of an LED luminaire, while LED drivers deliver dimming from a 0-10V control signal. Dims to 10% standard. Wireless networking: maintaining the familiar look of traditional linear fluorescent troffer. This allows for a seamless transition to EnOcean, Zigbee or Encelium wireless technologies create a network to ensure communication LED without disrupting the look of the overall space. These benefits make the TSLED24 a great choice between fixtures, sensors and wall stations facility-wide. This option provides superior lighting for School, Office, Retail, Residential and Hospital applications. Certain airborne contaminants can diminish management capabilities including granular control, configuration and custom grouping for increased integrity of acrylic. energy savings. Consult factory for dim to off, auxiliary power 12/20/24Vdc and 0-10V step dimming to programmable levels. CONSTRUCTION: Full unibody construction along with chamfered corners and powder coat after fabrication allows for safe, INSTALLATION: easy installation. The body is constructed of 24 gauge, made in USA commercial grade steel with hot dip Drivers and internal components are accessible from the floor in standard products. LED boards include galvanized finish (6.5μm on both sides). plug-in connectors for future upgrades. Damp location listed. Not intended for continuous row mounting. Finish: Paint after fabrication (PAF) of galvanized body adds high resistance to rust over its lifetime.