Location of Unbalance Mass and Supporting Bearing for Different Type of Balance Shaft Module
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Camshaft / Balance Shaft Belt Information
ENG-04, Camshaft Belt / Balance Shaft Belt - General Information, Maintenance Intervals, Part Numbers Maintenance Intervals Timing belts have long been the source of many heated discussions and much heartache for 944 owners. Every new or potential 944 owner should read Jim Pasha's article, 944 Timing Belts and Water Pumps in the August 1994 issue of Excellence Magazine. Due to the history of changes in the factory recommendations for timing belt replacement, you'll find a number of different recommendations being given. The recommendations below are based on the most recent factory recommendations with some additional guidance based on personal experience. 944 Mileage Maintenance 2000 Inspect and retension timing and balance shaft belts. 15000* Inspect and retension timing and balance shaft belts. 30000 Inspect and retension timing and balance shaft belts Replace timing and balance shaft belts. Inspect rollers and replace if 45000 necessary. * For vehicles which see limited service, I recommend inspecting the belts after two years if 15000 miles has not been reached and annually thereafter. 968 Mileage Maintenance 15000 Inspect timing and balance shaft belts. 30000* Inspect timing and balance shaft belts. 45000 Inspect timing and balance shaft belts Replace timing and balance shaft belts. Inspect rollers and replace if 60000 necessary. * For vehicles which see limited service, I recommend inspecting the belts after two years if 15000 miles has not been reached and annually thereafter. Parts For highlighted items choose one of the parts based on specific model. Page 1 of 3 Based on my own experience of a tensioner stud failure and reports of similar occurrences from other owners, I recommend replacing the cam belt tensioner mounting stud at each timing belt replacement. -

Small Engine Technology
Small Engine Technology Code: 5277 Version: 01 Copyright © 2012. All Rights Reserved. Small Engine Technology General Assessment Information Blueprint Contents General Assessment Information Sample Written Items Written Assessment Information Performance Assessment Information Specic Competencies Covered in the Test Sample Performance Job Test Type: The Small Engine Technology assessment is included in NOCTI’s Teacher assessment battery. Teacher assessments measure an individual’s technical knowledge and skills in a proctored prociency examination format. These assessments are used in a large number of states as part of the teacher licensing and/or certication process, assessing competency in all aspects of a particular industry. NOCTI Teacher tests typically oer both a written and performance component that must be administered at a NOCTI-approved Area Test Center. Teacher assessments can be delivered in an online or paper/pencil format. Revision Team: The assessment content is based on input from subject matter experts representing the following states: Idaho, Maine, Michigan, Pennsylvania, and Virginia. CIP Code 47.0606- Small Engine Career Cluster 16- 49-3053.00- Outdoor Power Mechanics and Repair Transportation, Distribution, Equipment and Other Technology/Technician and Logistics Small Engine Mechanics NOCTI Teacher Assessment Page 2 of 10 Small Engine Technology Wrien Assessment NOCTI written assessments consist of questions to measure an individual’s factual theoretical knowledge. Administration Time: 3 hours Number of Questions: -

Balance Shaft Sprocket Installation and Alignment Check
ENG-08, Balance Shaft Sprocket Installation and Alignment Check Introduction If your 944 is experiencing vibration problems, the cause could be a balance shaft misalignment. This can occur if the balance shaft belt slips a tooth, the balance shaft belt is broken, or if the balance shaft sprockets are installed incorrectly. Quite often, balance shaft sprocket misalignment occurs after water pump, crankshaft oil seal, or balance shaft oil seal replacement. The following procedure will tell you how to correctly install the balance shaft sprockets and how to check them for proper alignment if you suspect that the sprockets may have been installed incorrectly. Other Procedures Needed • ENG-13, Locating and Setting Engine to Top Dead Center (TDC), Cylinder 1 Installation Each balance shaft sprocket has two slotted grooves on the inside diameter. One of the grooves on the sprocket will slide onto a woodruff key which is inserted into a slot near the front end of the balance shaft. On 1983 and 1984 model 944s, each balance shaft sprocket was stamped on the front with an "O" (Ober or Over) beside one of the slotted grooves and a "U" (Unter or Under) beside the other slotted groove. As one might have guessed, on the upper balance shaft, the groove with the "O" stamped beside it was installed onto the woodruff key, and on the lower balance shaft, the groove with the "U" stamped beside it was installed onto the woodruff key. I'm not sure what prompted Porsche to do it but, on cars produced after 1984, only the slotted groove with the "O" was stamped. -

Download 2021 Catalog
The Engine Parts, Cores, & Recycling Partner You Can Count On, Now and Into The Future EngineQuest and EQ Cores & Recycling has served the engine and transmission remanufacturing market for over 70 years. EngineQuest has provided remanufacturing solutions since 1987. We specialize in hard-to-find or hard-to-salvage parts, as well as parts that make one item work in a different application. In the restoration market, EngineQuest has become a leader in making replacement parts that OEMs have obsoleted, such as the FE Ford Rocker Assembly, V8 Pontiac Timing Cover, and Small Block Chevy Oil Filter Adaptor. We continue to expand our product line, which now includes our two newest items – replacement Crankshaft Sleeves for the FE Ford and 429/460 Ford engines. For hard-to-salvage items, it often means buying from the OEM, where the prices might not be logical, or the OE doesn’t sell the part you actually need. EngineQuest will make these items so our customers can get what they need, for the best possible price, when and how they need it. This includes LS Chevy Oil Galley Plugs, Valve Cover Bolts, Head Bolt Sets, and many others. EQ Cores & Recycling was part of A&A Midwest, which began selling engine & transmission cores in 1949. In 2020, the Las Vegas location became EQ Cores & Recycling. Over the years, the product line has grown to include engine component cores, as well as transfer cases, and torque converters. With nearly 10,000 engines, 2,000 transmissions, and thousands of component parts in stock, EQ Cores & Recycling is ready to serve your core needs. -

A Model-Based Design Approach to Redesign a Crankshaft for Powder Metal Manufacturing
A model-based design approach to redesign a crankshaft for powder metal manufacturing VASILEIOS ANGELOPOULOS Master of Science Thesis Stockholm, Sweden 2015 A model-based design approach to redesign a crankshaft for powder metal manufacturing VASILEIOS ANGELOPOULOS Master of Science Thesis MMK 2015:100 MKN 154 KTH Industrial Engineering and Management Machine Design SE-100 44 STOCKHOLM Examensarbete MMK 2015:100 MKN 154 En modellbaserad designstrategi att omkonstruera en vevaxel för pulvermetallurgi Angelopoulos Vasileios Godkänt Examinator Handledare 2015-11-08 Ulf Sellgren Stefan Björklund Uppdragsgivare Kontaktperson Höganäs ab Marcus Persson Sammanfattning En vevaxel är en motorkomponent som används för att omvandla den fram- och återgående rörelsen hos kolv och vevstake till en roterande rörelse. De klassiska metoderna att tillverka vevaxlar har varit dominerande och inte gett någon plats för alternativa tillverkningsmetoder. Powder manufacturing är en metod som kan revolutionera produktionens effektivitet och ekonomi. För att denna tillverkningsmetod ska vara möjlig måste vevaxeln tillverkas i delar. Webs, counter-weights och journal shafts måste produceras individuellt för att sedan sammanfogas. Den största utmaningen för denna avhandling är att förstå om vevaxelns counter webs kan tillverkas med samma form eller med så få olika former som möjligt. Denna avhandling handlar främst om att fastställa dessa tekniska krav och föreslå en ny, modulär design för PM. En kinematisk-kinetisk analys utförs med hjälp av en befintlig vevaxel som skannats och omvandlats till en CAD-modell. De numeriska värdena jämförs med en MBS-modell från Adams. Vevaxeln analyseras med avseende på balansering då motvikternas placering, massa och geometriska egenskaper undersöks. Nya modeller som följer de tekniska krav som krävs skapas och utvärderas med Pugh-matris. -

Ask the Experts (Low-Res PDF)
www.motorcyclenews.com #MCNwednesday Send your questions to: BUYING & 48 GARAGE [email protected] THIS WEEK NEW BIKES FEATURES GARAGE SELLING SPORT March 16 2016 49 BMW S1000RR Heading off road? Q Leave the panniers or Aprilia RSV4? at home I’m moving up to a 1000cc superbike from my 2011 Suzuki GSX-R600. I’m partial to the odd trackday, and Your legal questions ANY QUESTION the bikes I have in mind are either a used BMW S1000RR or Aprilia RSV4. What would you recommend? Q I hit a pedestrian, Leigh Bishop, email but how do I stop Answered by Michael Neeves, MCN him from taking a If you are stepping up from the step too far? ✓ GSX-R600, the BMW makes sense ANSWERED for several reasons. It’s a four- Last October I hit a pedestrian at If we don’t know the answer, we’ll find the person who does cylinder like your 600 so it won’t be a crossing. I was doing 25-30mph so much of a culture shock. It may but misjudged the lights. I was too feel even more familiar because close to stop safely as they went when BMW were first developing amber, and they turned to red as I The steel-frame their new engine the test mule was went through them. This lad stepped CBR600 is a classic, Purchasing an unregistered bike like a Suzuki GSX-R1000 K5 chassis. If out as soon as the light turned red, but it’s not immune an FZ8 should prove trouble free your budget allows go for a 2012-on looking the opposite way to the from reg-rec S1000RR. -

Some Science of Balance © Tony Foale 2007
Some science of balance © Tony Foale 2007. Readers who started riding before the 1970s, will easily remember the incredible vibration that we used to have to suffer, particularly with British single and twin cylinder machines. In addition to that, we also had to endure quite severe vibration from road shocks generally because of poor suspension. However, with the advent of the Japanese multi-cylinder machines, Lanchester balance shafts and the drive towards better suspension, today we can enjoy a much greater freedom from annoying vibration. In this article, we will only consider the vibration caused by the engine. This vibration has two basic sources, the least severe of which stems from the irregular torque output of reciprocating internal combustion engines. However, the biggest problem is due to the inability to balance inertia forces due to the piston motion in certain types of engine configuration. There can be two sources of mechanical imbalance, they are; rotating and reciprocating. Rotating balance Any rotating object can produce nett rotating forces if not properly balanced. Typical items of concern to us, would be the clutch assembly, alternators, flywheels and crankshaft. These out of balance forces are due to asymmetrical mass distribution about the rotating axis of the object in question. The clutch, alternators and any external flywheels can be fully balanced. However, due to the needs of reciprocating balance, certain configurations of engine, rarely allow us to achieve perfect rotating balance of the crankshaft, single cylinder engines, for example. There are two aspects of rotating balance which need to be considered. These are usually termed static and dynamic. -
Identifying Balance Shaft Drive Chain & Components Courtesy Of
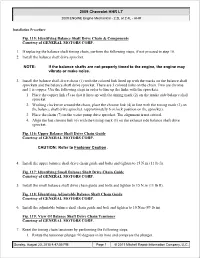
2009 Chevrolet HHR LT 2009 ENGINE Engine Mechanical - 2.2L or 2.4L - HHR Installation Procedure Fig. 115: Identifying Balance Shaft Drive Chain & Components Courtesy of GENERAL MOTORS CORP. 1. If replacing the balance shaft timing chain, perform the following steps, if not proceed to step 10. 2. Install the balance shaft drive sprocket. NOTE: If the balance shafts are not properly timed to the engine, the engine may vibrate or make noise. 3. Install the balance shaft drive chain (1) with the colored link lined up with the marks on the balance shaft sprockets and the balance shaft drive sprocket. There are 3 colored links on the chain. Two are chrome and 1 is copper. Use the following steps in order to line up the links with the sprockets. 1. Place the copper link (5) so that it lines up with the timing mark (2) on the intake side balance shaft sprocket. 2. Working clockwise around the chain, place the chrome link (4) in line with the timing mark (3) on the balance shaft drive sprocket. (approximately 6 o'clock position on the sprocket). 3. Place the chain (7) on the water pump drive sprocket. The alignment is not critical. 4. Align the last chrome link (6) with the timing mark (1) on the exhaust side balance shaft drive sprocket. Fig. 116: Upper Balance Shaft Drive Chain Guide Courtesy of GENERAL MOTORS CORP. CAUTION: Refer to Fastener Caution . 4. Install the upper balance shaft drive chain guide and bolts and tighten to 15 N.m (11 lb ft). Fig. -

Ford Or It’S Successors
FFoorrdd Service Manual V-4 104 Cubic Inch Gasoline Engine Service Manual THIS IS A MANUAL PRODUCED BY JENSALES INC. WITHOUT THE AUTHORIZATION OF FORD OR IT’S SUCCESSORS. FORD AND IT’S SUCCESSORS ARE NOT RESPONSIBLE FOR THE QUALITY OR ACCURACY OF THIS MANUAL. TRADE MARKS AND TRADE NAMES CONTAINED AND USED HEREIN ARE THOSE OF OTHERS, AND ARE USED HERE IN A DESCRIPTIVE SENSE TO REFER TO THE PRODUCTS OF OTHERS. FO-S-ENG 104 104 CID V-4 ENGINE SERVICE MANUAL INDEX Page No. Basic Engine ...................................... 13 Charging System ................................... 59 Cooling System .... .. 52 Electrical Diagrams ... .. 82 Engine Specifications ............................... 33 Fuel System ...................................... 43 General Information and Description ................... 5 Governor ........................................ 65 Ignition System ................................... 35 Maintenance ...................................... 7 Power Take-Off ...................... :............ 80 Special Tools and Torque Specifications. .. 84 Starting System. • . .. 54 Transaxle and Clutch ............................... 68 1 MINOR REPAIRS AND ADJUSTMENTS MINOR REPAIRS AND ADJUSTMENTS VALVE LASH ADJUSTMENT necessary, follow the sequence shown Start the engine and operate at a in Fig. 3-3. fast idle speed until operating Tighten the bolts to 60 ft-lbs using temperature is reached. Remove the a properly calibrated torque wrench rocker arm covers from each cylinder (Fig. 3-4). If the cylinder heads were bank. removed and are to be reinstalled, Before adjusting the valves, torque follow the procedure described under the rocker arm stand bolts to 35 "Cylinder Heads· Installation." ft-Ibs. The valves are adjusted by positioning each piston at T.D.C. on the compression stroke in the firing order sequence (1-3-4-2) (Fig. 3-1). Fig. 3-2 - Adjusting Valve Lash Rotate the engine manually until the timing marks on the drive pulley The most accurate method for indicate T.D.C. -

Planar Crankshaft Balance System
^ ^ H ^ I H ^ H ^ II ^ II ^ ^ ^ ^ ^ H ^ ^ ^ H ^ ^ ^ ^ ^ I ^ � European Patent Office Office europeen des brevets EP 0 758 060 A1 (12) EUROPEAN PATENT APPLICATION (43) Date of publication: (51) |nt Cl.e: F16F 15/26 12.02.1997 Bulletin 1997/07 (21) Application number: 96305092.7 (22) Date of filing: 10.07.1996 (84) Designated Contracting States: (72) Inventor: Diggs, Matthew Byrne DE ES GB Farmington, Michigan 48335 (US) (30) Priority: 07.08.1995 US 512378 (74) Representative: Messu lam, Alec Moses A. Messulam & Co. (71) Applicants: 24 Broadway • FORD MOTOR COMPANY LIMITED Leigh-on-Sea Essex SS9 1 BN (GB) Brentwood Essex (GB) Designated Contracting States: GB • FORD-WERKE AKTIENGESELLSCHAFT 50735 Koln (DE) Designated Contracting States: DE • Ford Motor Company Dearborn, Ml 48126 (US) Designated Contracting States: ES (54) Planar crankshaft balance system (57) A balance system for a planar crankshaft on a (12), and a mechanism (40,42,44,46,48,50) intercon- V configuration internal combustion engine (14) includ- necting the first balance shaft (32), the planar crankshaft ing a first balance shaft (32) located above the planar (1 2) and the second balance shaft (34) to rotate the first crankshaft (12) inside a vee of the engine and a second balance shaft (32) and the second balance shaft (34) in balance shaft (34) located below the planar crankshaft opposite directions to balance the engine. Printed by Jouve, 75001 PARIS (FR) 1 EP 0 758 060 A1 2 Description planar crankshaft and the second balance shaft to rotate the first balance shaft and the second balance shaft in The present invention relates generally to planar opposite directions to balance the engine. -

Timing & Balance Shaft Kit Installation Gm & Saturn 2.2L
Important: If the balance shafts are not properly timed to the engine, the engine may vibrate and make noise. TIMING & BALANCE SHAFT KIT INSTALLATION 1. Install the upper balance shaft chain guide. Tighten the upper balance shaft chain guide bolts to 15 Nm (133 inch lbs.) . GM & SATURN 2.2L 1. Install the upper balance shaft chain guide. Tighten the upper balance shaft chain guide bolts to 15 Nm (133 inch lbs.). 2. Install the small balance shaft chain guide. 3. Tighten the balance shaft chain guide bolts. Tighten the chain buide bolts to 10 Nm (89 inch lbs.). Zoom Sized for Print 4. Install the adjustable balance shaft drive chain guide. Tighten the chain guide bolts to 2. Install the small 10balance Nm shaft (89 chain inch guide. lbs.) . 3. Tighten the balance shaft chain guide bolts. Tighten the chain guide bolts to 10 Zoom Sized for Print Nm (89 inch lbs.) . 4. Install the adjustable balance shaft drive chain guide. Tighten the chain guide bolts to 10 Nm (89 inch lbs.) . 5. Install the timing chain tensioner. Zoom Sized for Print 6. Tighten the chain tensioner bolts. Tighten the chain tensioner bolts to 10 Nm (89 inch lbs.). 4. Install the adjustable balance shaft drive chain guide. Tighten the chain guide bolts to 10 Nm (89 inch lbs.) . 7. Remove the pin from the balance shaft 5. Turn the tensioner plunger 90 degrees in its bore and compress the plunger drive chain tensioner. until a paper clip can be inserted through the hole in the plunger body and into hole in the tensioner plunger. -

Design and Analysis of Four Cylinder Diesel Engine Balancer Shaft
Published by : International Journal of Engineering Research & Technology (IJERT) http://www.ijert.org ISSN: 2278-0181 Vol. 5 Issue 08, August-2016 Design and Analysis of Four Cylinder Diesel Engine Balancer Shaft Gopal Kumar Kumhar Shakti Kumar Singh Tejas Babhale M. Tech CAD/CAM Chief Manager Manager VIT University Escorts Agri Machinery R&D Escorts Agri Machinery R&D Vandalur - Kelambakkam Road, Centre Centre Chennai, Tamil Nadu-600048 15/5 Mathura road, Faridabad, 15/5 Mathura road, Faridabad, Haryana-121003 Haryana-121003 Abstract— Noise, Vibration and Harshness (NVH) are the Alexandre Augusto Riginik Ferreira, Caetano Calviti, major issues in today’s modern diesel engine. The reciprocating Frederico Barbieri and Celso Argachoy [1], described the movement of the piston and connecting rod, combined with the balancer shaft development for the In-line four cylinder high rotating movement of crankshaft generates inertial forces that speed diesel engine, as well as major design alternatives and act on the engine block and cause it to vibrate in different development process and issues by using design/decision planes. An important key in the working engine is the first-order and second-order inertial forces which cause high amplitude matrix methodology which can be applied to any design or excitation of vehicle structure and leads to interior noise and engineering case helps design engineers to make the right riding discomfort to the driver. In our study of four cylinder decision amongst different options by using a very simple engine configuration, secondary inertial forces are the main and objective matrix. Kwon-Hee Suh, Yoon-Ki Lee and Hi- cause of vibration acting in vertical direction.