5 Frequency Measurement and Manipulation
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Chapter 19 - the Oscillator
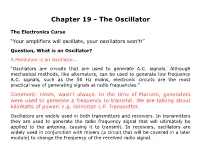
Chapter 19 - The Oscillator The Electronics Curse “Your amplifiers will oscillate, your oscillators won't!” Question, What is an Oscillator? A Pendulum is an Oscillator... “Oscillators are circuits that are used to generate A.C. signals. Although mechanical methods, like alternators, can be used to generate low frequency A.C. signals, such as the 50 Hz mains, electronic circuits are the most practical way of generating signals at radio frequencies.” Comment: Hmm, wasn't always. In the time of Marconi, generators were used to generate a frequency to transmit. We are talking about kiloWatts of power! e.g. Grimeton L.F. Transmitter. Oscillators are widely used in both transmitters and receivers. In transmitters they are used to generate the radio frequency signal that will ultimately be applied to the antenna, causing it to transmit. In receivers, oscillators are widely used in conjunction with mixers (a circuit that will be covered in a later module) to change the frequency of the received radio signal. Principal of Operation The diagram below is a ‘block diagram’ showing a typical oscillator. Block diagrams differ from the circuit diagrams that we have used so far in that they do not show every component in the circuit individually. Instead they show complete functional blocks – for example, amplifiers and filters – as just one symbol in the diagram. They are useful because they allow us to get a high level overview of how a circuit or system functions without having to show every individual component. The Barkhausen Criterion [That's NOT ‘dog box’ in German!] Comment: In electronics, the Barkhausen stability criterion is a mathematical condition to determine when a linear electronic circuit will oscillate. -

Analysis of BJT Colpitts Oscillators - Empirical and Mathematical Methods for Predicting Behavior Nicholas Jon Stave Marquette University
Marquette University e-Publications@Marquette Master's Theses (2009 -) Dissertations, Theses, and Professional Projects Analysis of BJT Colpitts Oscillators - Empirical and Mathematical Methods for Predicting Behavior Nicholas Jon Stave Marquette University Recommended Citation Stave, Nicholas Jon, "Analysis of BJT Colpitts sO cillators - Empirical and Mathematical Methods for Predicting Behavior" (2019). Master's Theses (2009 -). 554. https://epublications.marquette.edu/theses_open/554 ANALYSIS OF BJT COLPITTS OSCILLATORS – EMPIRICAL AND MATHEMATICAL METHODS FOR PREDICTING BEHAVIOR by Nicholas J. Stave, B.Sc. A Thesis submitted to the Faculty of the Graduate School, Marquette University, in Partial Fulfillment of the Requirements for the Degree of Master of Science Milwaukee, Wisconsin August 2019 ABSTRACT ANALYSIS OF BJT COLPITTS OSCILLATORS – EMPIRICAL AND MATHEMATICAL METHODS FOR PREDICTING BEHAVIOR Nicholas J. Stave, B.Sc. Marquette University, 2019 Oscillator circuits perform two fundamental roles in wireless communication – the local oscillator for frequency shifting and the voltage-controlled oscillator for modulation and detection. The Colpitts oscillator is a common topology used for these applications. Because the oscillator must function as a component of a larger system, the ability to predict and control its output characteristics is necessary. Textbooks treating the circuit often omit analysis of output voltage amplitude and output resistance and the literature on the topic often focuses on gigahertz-frequency chip-based applications. Without extensive component and parasitics information, it is often difficult to make simulation software predictions agree with experimental oscillator results. The oscillator studied in this thesis is the bipolar junction Colpitts oscillator in the common-base configuration and the analysis is primarily experimental. The characteristics considered are output voltage amplitude, output resistance, and sinusoidal purity of the waveform. -
Oscillator Design
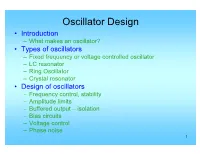
Oscillator Design •Introduction –What makes an oscillator? •Types of oscillators –Fixed frequency or voltage controlled oscillator –LC resonator –Ring Oscillator –Crystal resonator •Design of oscillators –Frequency control, stability –Amplitude limits –Buffered output –isolation –Bias circuits –Voltage control –Phase noise 1 Oscillator Requirements •Power source •Frequency-determining components •Active device to provide gain •Positive feedback LC Oscillator fr = 1/ 2p LC Hartley Crystal Colpitts Clapp RC Wien-Bridge Ring 2 Feedback Model for oscillators x A(jw) i xo A (jw) = A f 1 - A(jω)×b(jω) x = x + x d i f Barkhausen criteria x f A( jw)× b ( jω) =1 β Barkhausen’scriteria is necessary but not sufficient. If the phase shift around the loop is equal to 360o at zero frequency and the loop gain is sufficient, the circuit latches up rather than oscillate. To stabilize the frequency, a frequency-selective network is added and is named as resonator. Automatic level control needed to stabilize magnitude 3 General amplitude control •One thought is to detect oscillator amplitude, and then adjust Gm so that it equals a desired value •By using feedback, we can precisely achieve GmRp= 1 •Issues •Complex, requires power, and adds noise 4 Leveraging Amplifier Nonlinearity as Feedback •Practical trans-conductance amplifiers have saturating characteristics –Harmonics created, but filtered out by resonator –Our interest is in the relationship between the input and the fundamental of the output •As input amplitude is increased –Effective gain from input -
Lec#12: Sine Wave Oscillators
Integrated Technical Education Cluster Banna - At AlAmeeria © Ahmad El J-601-1448 Electronic Principals Lecture #12 Sine wave oscillators Instructor: Dr. Ahmad El-Banna 2015 January Banna Agenda - © Ahmad El Introduction Feedback Oscillators Oscillators with RC Feedback Circuits 1448 Lec#12 , Jan, 2015 Oscillators with LC Feedback Circuits - 601 - J Crystal-Controlled Oscillators 2 INTRODUCTION 3 J-601-1448 , Lec#12 , Jan 2015 © Ahmad El-Banna Banna Introduction - • An oscillator is a circuit that produces a periodic waveform on its output with only the dc supply voltage as an input. © Ahmad El • The output voltage can be either sinusoidal or non sinusoidal, depending on the type of oscillator. • Two major classifications for oscillators are feedback oscillators and relaxation oscillators. o an oscillator converts electrical energy from the dc power supply to periodic waveforms. 1448 Lec#12 , Jan, 2015 - 601 - J 4 FEEDBACK OSCILLATORS FEEDBACK 5 J-601-1448 , Lec#12 , Jan 2015 © Ahmad El-Banna Banna Positive feedback - • Positive feedback is characterized by the condition wherein a portion of the output voltage of an amplifier is fed © Ahmad El back to the input with no net phase shift, resulting in a reinforcement of the output signal. Basic elements of a feedback oscillator. 1448 Lec#12 , Jan, 2015 - 601 - J 6 Banna Conditions for Oscillation - • Two conditions: © Ahmad El 1. The phase shift around the feedback loop must be effectively 0°. 2. The voltage gain, Acl around the closed feedback loop (loop gain) must equal 1 (unity). 1448 Lec#12 , Jan, 2015 - 601 - J 7 Banna Start-Up Conditions - • For oscillation to begin, the voltage gain around the positive feedback loop must be greater than 1 so that the amplitude of the output can build up to a desired level. -
Oscillator Circuits
Oscillator Circuits 1 II. Oscillator Operation For self-sustaining oscillations: • the feedback signal must positive • the overall gain must be equal to one (unity gain) 2 If the feedback signal is not positive or the gain is less than one, then the oscillations will dampen out. If the overall gain is greater than one, then the oscillator will eventually saturate. 3 Types of Oscillator Circuits A. Phase-Shift Oscillator B. Wien Bridge Oscillator C. Tuned Oscillator Circuits D. Crystal Oscillators E. Unijunction Oscillator 4 A. Phase-Shift Oscillator 1 Frequency of the oscillator: f0 = (the frequency where the phase shift is 180º) 2πRC 6 Feedback gain β = 1/[1 – 5α2 –j (6α – α3) ] where α = 1/(2πfRC) Feedback gain at the frequency of the oscillator β = 1 / 29 The amplifier must supply enough gain to compensate for losses. The overall gain must be unity. Thus the gain of the amplifier stage must be greater than 1/β, i.e. A > 29 The RC networks provide the necessary phase shift for a positive feedback. They also determine the frequency of oscillation. 5 Example of a Phase-Shift Oscillator FET Phase-Shift Oscillator 6 Example 1 7 BJT Phase-Shift Oscillator R′ = R − hie RC R h fe > 23 + 29 + 4 R RC 8 Phase-shift oscillator using op-amp 9 B. Wien Bridge Oscillator Vi Vd −Vb Z2 R4 1 1 β = = = − = − R3 R1 C2 V V Z + Z R + R Z R β = 0 ⇒ = + o a 1 2 3 4 1 + 1 3 + 1 R4 R2 C1 Z2 R4 Z2 Z1 , i.e., should have zero phase at the oscillation frequency When R1 = R2 = R and C1 = C2 = C then Z + Z Z 1 2 2 1 R 1 f = , and 3 ≥ 2 So frequency of oscillation is f = 0 0 2πRC R4 2π ()R1C1R2C2 10 Example 2 Calculate the resonant frequency of the Wien bridge oscillator shown above 1 1 f0 = = = 3120.7 Hz 2πRC 2 π(51×103 )(1×10−9 ) 11 C. -

A 20 Mv Colpitts Oscillator Powered by a Thermoelectric Generator
A 20 mV Colpitts Oscillator powered by a thermoelectric generator Fernando Rangel de Sousa∗, Marcio Bender Machado∗†, Carlos Galup-Montoro ∗ ∗Integrated Circuits Laboratory-LCI Federal University of Santa Catarina-UFSC Florianopolis-SC, Brazil, Tel.: +55-48-3721-7640 Email:[email protected] † Sul-Rio-Grandense Federal Institute Charqueadas-RS, Brazil Email:[email protected] Abstract—In this paper, we present a MOSFET-based Colpitts of around 13 mV , only seven milivolts far from the voltage oscillator based on a “zero-threshold” transistor operating at a supply value for which the circuit sustained oscillations at 130 supply voltage below 20 mV. The circuit was carefully analyzed mV(peak-to-peak)/97 kHz. Moreover, the circuit was powered and expressions relating the start-up conditions and the voltage supply, as well as the oscillation frequency were developed. by a thermoelectric generator which supplied a DC voltage of Measurement results obtained on a discrete prototype confirmed around 22 mV when it was installed on the arm of a person the low-voltage operation of the oscillator, which sustained in a 24oC room. oscillations of 130 mV (peak-to-peak) at 97 kHz when the voltage supply was 19.8 mV. The circuit was also powered from a II. COLPITTS OSCILLATOR thermoelectric generator (TEG) connected to a persons arm in a room with temperature of 24oC room. Under these conditions, A Colpitts oscillator can be broken in two main blocks : i) the TEG supplied 22 mV and the circuit operated as expected. a potentially unstable one-port and ii) a load network, as it is shown in Fig. -

A Study of Phase Noise in Colpitts and LC-Tank CMOS Oscillators
Downloaded from orbit.dtu.dk on: Oct 02, 2021 A study of phase noise in colpitts and LC-tank CMOS oscillators Andreani, Pietro; Wang, Xiaoyan; Vandi, Luca; Fard, A. Published in: I E E E Journal of Solid State Circuits Link to article, DOI: 10.1109/JSSC.2005.845991 Publication date: 2005 Document Version Publisher's PDF, also known as Version of record Link back to DTU Orbit Citation (APA): Andreani, P., Wang, X., Vandi, L., & Fard, A. (2005). A study of phase noise in colpitts and LC-tank CMOS oscillators. I E E E Journal of Solid State Circuits, 40(5), 1107-1118. https://doi.org/10.1109/JSSC.2005.845991 General rights Copyright and moral rights for the publications made accessible in the public portal are retained by the authors and/or other copyright owners and it is a condition of accessing publications that users recognise and abide by the legal requirements associated with these rights. Users may download and print one copy of any publication from the public portal for the purpose of private study or research. You may not further distribute the material or use it for any profit-making activity or commercial gain You may freely distribute the URL identifying the publication in the public portal If you believe that this document breaches copyright please contact us providing details, and we will remove access to the work immediately and investigate your claim. IEEE JOURNAL OF SOLID-STATE CIRCUITS, VOL. 40, NO. 5, MAY 2005 1107 A Study of Phase Noise in Colpitts and LC-Tank CMOS Oscillators Pietro Andreani, Member, IEEE, Xiaoyan Wang, Luca Vandi, and Ali Fard Abstract—This paper presents a study of phase noise in CMOS phase noise itself. -

CLAPPS OSCILLATOR SHUBANGI MAHAJAN Indian Institute of Information Technology, Trichy
CLAPPS OSCILLATOR SHUBANGI MAHAJAN Indian Institute of Information Technology, Trichy INTRODUCTION Clapp oscillator is a variation Of Colpitts oscillator.The circuit differs from the Colpitts oscillator only in one respect; it contains one additional capacitor (C3) connected in series with the inductor. The addition of capacitor (C3) improves the frequency stability and eliminates the effect of transistor parameters and stray capacitances. Apart from the presence of an extra capacitor, all other components and their connections remain similar to that in the case of Colpitts oscillator. Hence, the working of this circuit is almost identical to that of the Colpitts, where the feedback ratio governs the generation and sustainability of the oscillations. However, the frequency of oscillation in the case of Clapp oscillator is given by fo=1/2π√L.C Where C=1/ (1/C1+1/C2+1/C3) Usually, the value of C3 is much smaller than C1 and C2. As a result of this, C is approximately equal to C3. Therefore, the frequency of oscillation, fo=1/2π√L.C3 Usually the value of C3 is chosen to be much smaller than the other two capacitors. Thus the net capacitance governing the circuit will be more dependent on it. A Clapp oscillator is sometimes preferred over a Colpitts oscillator for constructing a variable frequency oscillator. The Clapp oscillators are used in receiver tuning circuits as a frequency oscillator. These oscillators are highly reliable and are hence preferred inspite of having a limited range of frequency of operation. SCHEMATIC DIAGRAM Figure 1: Schematic diagram of clap oscillator NgSpice Plots: Figure 2: Output Plot PYTHON PLOT: Figure 3: output plot REFERENCES • https://www.tutorialspoint.com/sinusoidal_oscillators/sinusoidal_clapp_oscillat or.htm • https://www.electrical4u.com/clapp-oscillator/ . -

Analog IC Design - the Obsolete Book
Analog IC design - the obsolete book Ricardo Erckert July 2021 Contents 1 Preface 7 1.1 Using the book . 7 1.2 If you find mistakes . 8 1.3 Copying . 8 1.4 Warranty and Liability . 8 2 The top level of a chip 8 2.1 How to get the correct data of a chip . 8 2.1.1 Versioning tools . 9 2.2 System on a chip . 11 2.2.1 Where exactly is “ground”? . 12 2.2.2 Signals: If anything can go wrong it will! . 12 2.2.3 Timings . 14 2.3 Top level . 14 2.4 Hierarchy of the chip . 15 2.4.1 Analog on top . 15 2.5 Down at the bottom . 16 2.5.1 Electric . 16 2.5.2 Xcircuit . 17 3 From wafer to chip 18 3.1 Choice of the right substrate . 20 3.1.1 Junction isolated P- substrate . 20 3.1.2 Junction Isolated P+ substrate . 21 3.1.3 Junction isolated N- substrate . 22 3.1.4 Junction isolated N+ substrate . 22 3.1.5 Oxide isolated technology with N-tubs . 23 3.1.6 Oxide isolated technology with P-tubs . 26 3.2 Examples of more complex processes . 26 3.2.1 A bipolar process . 26 3.2.2 A BCD (bipolar, CMOS, DMOS) power process . 27 3.2.3 An isolated (ABCD - advanced BCD) power process . 28 3.2.4 A non volatile memory process . 29 3.2.5 State of the art (2020) digital processes . 29 3.2.6 Programmable chips . 29 4 Components 31 4.1 Wires . -
Sinusoidal and Non- Sinusoidal Oscillators
CHAPTER65 Learning Objectives ➣ What is an Oscillator? SINUSOIDAL ➣ Classification of Oscillators ➣ Damped and Undamped AND NON- Oscillations ➣ Oscillatory Circuit ➣ Essentials of a Feedback LC SINUSOIDAL Oscillator ➣ Tuned Base Oscillator ➣ Tuned Collector Oscillator OSCILLATORS ➣ Hartley Oscillator ➣ FET Hartley Oscillator ➣ Colpitts Oscillator ➣ Clapp Oscillator ➣ FET Colpitts Oscillator ➣ Crystal Controlled Oscillator ➣ Transistor Pierce Cystal Oscillator ➣ FET Pierce Oscillator ➣ Phase Shift Principle ➣ RC Phase Shift Oscillator ➣ Wien Bridge Oscillator ➣ Pulse Definitions ➣ Basic Requirements of a Sawtooth Generator ➣ UJT Sawtooth Generator ➣ Multivibrators (MV) ➣ Astable Multivibrator An oscillator is an electronic device used for ➣ Bistable Multivibrator (BMV) the purpose of generating a signal. Oscillators ➣ Schmitt Trigger are found in computers, wireless receivers ➣ Transistor Blocking Oscillator and transmitters, and audiofrequency equipment particularly music synthesizers 2408 Electrical Technology 65.1. What is an Oscillator ? An electronic oscillator may be defined in any one of the following four ways : 1. It is a circuit which converts dc energy into ac energy at a very high frequency; 2. It is an electronic source of alternating cur- rent or voltage having sine, square or sawtooth or pulse shapes; 3. It is a circuit which generates an ac output signal without requiring any externally ap- Oscillator plied input signal; 4. It is an unstable amplifier. These definitions exclude electromechanical alternators producing 50 Hz ac power or other devices which convert mechanical or heat energy into electric energy. 65.2. Comparison Between an Amplifier and an Oscillator As discussed in Chapter-10, an amplifier produces an output signal whose waveform is similar to the input signal but whose power level is generally high. -
Oscilators Simplified
SIMPLIFIED WITH 61 PROJECTS DELTON T. HORN SIMPLIFIED WITH 61 PROJECTS DELTON T. HORN TAB BOOKS Inc. Blue Ridge Summit. PA 172 14 FIRST EDITION FIRST PRINTING Copyright O 1987 by TAB BOOKS Inc. Printed in the United States of America Reproduction or publication of the content in any manner, without express permission of the publisher, is prohibited. No liability is assumed with respect to the use of the information herein. Library of Cangress Cataloging in Publication Data Horn, Delton T. Oscillators simplified, wtth 61 projects. Includes index. 1. Oscillators, Electric. 2, Electronic circuits. I. Title. TK7872.07H67 1987 621.381 5'33 87-13882 ISBN 0-8306-03751 ISBN 0-830628754 (pbk.) Questions regarding the content of this book should be addressed to: Reader Inquiry Branch Editorial Department TAB BOOKS Inc. P.O. Box 40 Blue Ridge Summit, PA 17214 Contents Introduction vii List of Projects viii 1 Oscillators and Signal Generators 1 What Is an Oscillator? - Waveforms - Signal Generators - Relaxatton Oscillators-Feedback Oscillators-Resonance- Applications--Test Equipment 2 Sine Wave Oscillators 32 LC Parallel Resonant Tanks-The Hartfey Oscillator-The Coipltts Oscillator-The Armstrong Oscillator-The TITO Oscillator-The Crystal Oscillator 3 Other Transistor-Based Signal Generators 62 Triangle Wave Generators-Rectangle Wave Generators- Sawtooth Wave Generators-Unusual Waveform Generators 4 UJTS 81 How a UJT Works-The Basic UJT Relaxation Oscillator-Typical Design Exampl&wtooth Wave Generators-Unusual Wave- form Generator 5 Op Amp Circuits -
Analog Circuits (EC-405) Unit : I Topic : Oscillator
Name of Faculty : Prof. L N Gahalod Designation : Associate Professor Department : Electronics & Communication Subject : Analog Circuits (EC-405) Unit : I Topic : Oscillator Analog Circuits (EC-405) Page 1 UNIT – I Feedback Amplifier and Oscillators 1.8 Oscillator: Any circuit that generates an alternating signal is called oscillator. To generate ac signal, the circuit is supplied energy from a dc source. The oscillators have variety of applications. In some application we need signal of low frequencies, in other of very high frequencies. For example, to test the performance of a stereo amplifier, we need an oscillator of variable frequency in audio range (20Hz – 20kHz), which is called audio frequency generator. Generation of high frequency is essential in all communication system. For example in radio and television broadcasting, the transmitter radiates the signal using a carrier of very high frequency. Some applications of communication system with their frequency band is given below. 550 kHz – 22 MHz Radio broadcasting 88 MHz – 108 MHz for FM radio 1 GHz – 4 GHz for DTH, TV and satellite Communication Figure 1.18: Block diagram of Oscillator Figure 1.18 shows that oscillator is an electronics source of alternating current or voltage having sine, square or saw tooth waves. Oscillator is a circuit which generates an ac source without requiring any externally applied input signal. It is a circuit which converts dc energy into ac energy at very high frequency. 1.9 Comparison between Amplifier and Oscillator: Comparision between an amplifier and an oscillator is explained in table 2. Analog Circuits (EC-405) Page 2 Amplifier Oscillator 1.