Hereby Certify That I Wrote My Diploma Thesis on My Own, Under the Guidance of the Thesis Supervisor
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Design and Applications of a Multi-Touch Musical Keyboard
DESIGN AND APPLICATIONS OF A MULTI-TOUCH MUSICAL KEYBOARD Andrew McPherson Youngmoo Kim Drexel University Drexel University [email protected] [email protected] ABSTRACT gesture and sound can be dynamically adjusted. On the other hand, touch-screen interfaces lack the tactile feed- This paper presents a hardware and software system for back that is foundational to many musical instruments, and adding multiple touch sensitivity to the piano-style key- they require the consistent visual attention of the performer. board. The traditional keyboard is a discrete interface, In this paper, we explore a synthesis between keyboard defining notes by onset and release. By contrast, our sys- and multi-touch interfaces by integrating multiple touch tem allows continuous gestural control over multiple di- sensitivity directly into each key. We present a new capac- mensions of each note by sensing the position and contact itive sensor system which records the spatial location and area of up to three touches per key. Each key consists of contact area of up to three touches per key. The sensors can a circuit board with a capacitive sensing controller, lami- be installed on any acoustic or electronic keyboard. The nated with thin plastic sheets to provide a traditional feel sensor hardware communicates via USB to a host com- to the performer. The sensors, which are less than 3mm puter, which uses the Open Sound Control (OSC) protocol thick, mount atop existing acoustic or electronic piano key- [1] to transmit both raw touch data and higher-level gestu- boards. The hardware connects via USB, and software on a ral features to any sound synthesis program. -

Design and Application of the Bivib Audio-Tactile Piano Sample Library
applied sciences Article Design and Application of the BiVib Audio-Tactile Piano Sample Library Stefano Papetti 1,† , Federico Avanzini 2,† and Federico Fontana 3,*,† 1 Institute for Computer Music and Sound Technology (ICST), Zurich University of the Arts, CH-8005 Zurich, Switzerland; [email protected] 2 LIM, Department of Computer Science, University of Milan, I-20133 Milano, Italy; [email protected] 3 HCI Lab, Department of Mathematics, Computer Science and Physics, University of Udine, I-33100 Udine, Italy * Correspondence: [email protected]; Tel.: +39-0432-558-432 † These authors contributed equally to this work. Received: 11 January 2019; Accepted: 26 February 2019; Published: 4 March 2019 Abstract: A library of piano samples composed of binaural recordings and keyboard vibrations has been built, with the aim of sharing accurate data that in recent years have successfully advanced the knowledge on several aspects about the musical keyboard and its multimodal feedback to the performer. All samples were recorded using calibrated measurement equipment on two Yamaha Disklavier pianos, one grand and one upright model. This paper documents the sample acquisition procedure, with related calibration data. Then, for sound and vibration analysis, it is shown how physical quantities such as sound intensity and vibration acceleration can be inferred from the recorded samples. Finally, the paper describes how the samples can be used to correctly reproduce binaural sound and keyboard vibrations. The library has potential to support experimental research about the psycho-physical, cognitive and experiential effects caused by the keyboard’s multimodal feedback in musicians and other users, or, outside the laboratory, to enable an immersive personal piano performance. -

Computer Mediated Music Production: a Study of Abstraction and Activity
Computer mediated music production: A study of abstraction and activity by Matthew Duignan A thesis for the degree of Doctor of Philosophy in Computer Science. Victoria University of Wellington 2008 Abstract Human Computer Interaction research has a unique challenge in under- standing the activity systems of creative professionals, and designing the user-interfaces to support their work. In these activities, the user is involved in the process of building and editing complex digital artefacts through a process of continued refinement, as is seen in computer aided architecture, design, animation, movie-making, 3D modelling, interactive media (such as shockwave-flash), as well as audio and music production. This thesis exam- ines the ways in which abstraction mechanisms present in music production systems interplay with producers’ activity through a collective case study of seventeen professional producers. From the basis of detailed observations and interviews we examine common abstractions provided by the ubiqui- tous multitrack-mixing metaphor and present design implications for future systems. ii Acknowledgements I would like to thank my supervisors Robert Biddle and James Noble for their endless hours of guidance and feedback during this process, and most of all for allowing me to choose such a fun project. Michael Norris and Lissa Meridan from the Victoria University music department were also invaluable for their comments and expertise. I would also like to thank Alan Blackwell for taking the time to discuss my work and provide valuable advice. I am indebted to all of my participants for the great deal of time they selflessly offered, and the deep insights they shared into their professional world. -

Mobile Clavier: New Music Keyboard for Flexible Key Transpose
Proceedings of the 2007 Conference on New Interfaces for Musical Expression (NIME07), New York, NY, USA Mobile Clavier: New Music Keyboard for Flexible Key Transpose Yoshinari TAKEGAWA Tsutomu TERADA Osaka University, Japan Osaka University, Japan [email protected] [email protected] Masahiko TSUKAMOTO Shojiro NISHIO Kobe University, Japan Osaka University, Japan [email protected] [email protected] ABSTRACT Musical performers need to show off their virtuosity for self- expression and communicate with other people. Therefore, they are prepared to perform at any time and anywhere. However, a musical keyboard of 88 keys is too large and too heavy to carry around. When a portable keyboard that is suitable for carrying around is played over a wide range, the notes being played frequently cause the diapason of the keyboard to protrude. It is common to use Key Transpose in conventional portable keyboards, which shifts the diapa- Figure 1: Mobile Clavier son of the keyboard. However, this function creates several problems such as the feeling of discomfort from the mis- alignment between the keying positions and their output sounds. Therefore, the goal of our study is to construct We focused on portable keyboards in this research that Mobile Clavier, which enables the diapason to be changed are suitable for carrying. When we use such portable key- smoothly. Mobile Clavier resolves the problems with Key boards to play music that has a wide diapason range, the Transpose by having black keys inserted between any two notes being played frequently cause the diapason of the key- side-by-side white keys. -

Unitkeyboard: an Easily Configurable Compact Clavier
Proceedings of the 2008 Conference on New Interfaces for Musical Expression (NIME08), Genova, Italy UnitKeyboard: An Easily Configurable Compact Clavier Yo s h i n a r i TA K E G AWA Tsutomu TERADA Masahiko TSUKAMOTO Kobe University, Japan Kobe University, Japan Kobe University, Japan [email protected] [email protected] [email protected] ABSTRACT (a) BaseUnit Musical keyboard instruments have a long history, which resulted in many kinds of keyboards (claviers) today. Since 1 octave higher diapason the hardware of conventional musical keyboards cannot be than that of the BaseUnit changed, such as the number of keys, musicians have to carry these large keyboards for playing music that requires only a small diapason. To solve this problem, the goal of (b) our study is to construct UnitKeyboard, which has only 12 2 octaves higher diapason keys (7 white keys and 5 black keys) and connectors for than that of the BaseUnit docking with other UnitKeyboards. We can build various BaseUnit kinds of musical keyboard configurations by connecting one 1 octave higher diapason UnitKeyboard to others, since they have automatic settings than that of the BaseUnit for multiple keyboard instruments. We discuss the usability of the UnitKeyboard from reviews by several amateur and professional pianists who used the UnitKeyboard. (c) BaseUnit EnhancedUnit 2 octaves higher diapason Keywords than that of the BaseUnit Portable keyboard instruments, block interface, Automatic settings Figure 1: Combination examples of UnitKeyboard keyboards, we can build various kinds of keyboard config- 1. INTRODUCTION urations by connecting a UnitKeyboard to other UnitKey- Musical keyboard instrument has a long history, resulting boards. -

(12) United States Patent (10) Patent No.: US 8,035,024 B2 Ludwig (45) Date of Patent: Oct
USOO8035.024B2 (12) United States Patent (10) Patent No.: US 8,035,024 B2 Ludwig (45) Date of Patent: Oct. 11, 2011 (54) PHASE-STAGGERED MULTI-CHANNEL 3.651,242 A 3, 1972 Evans SIGNAL PANNING 3,730,046 A 5/1973 Spence 3,742,133. A 6/1973 O'Sullivan 3,805,091 A 4, 1974 Colin (76) Inventor: Lester F. Ludwig, Redwood Shores, CA 3,813,473 A 5/1974 Terymenko (US) 3,878,748 A 4/1975 Spence 3,956.959 A 5, 1976 Ebihara et al. (*) Notice: Subject to any disclaimer, the term of this 3,962,945 A 6/1976 Creager et al. patent is extended or adjusted under 35 4,075,921 A 2, 1978 Heet U.S.C. 154(b) by 1158 days 4,080,867 A 3/1978 Ratanangsu (Continued) (21) Appl. No.: 10/702,262 FOREIGN PATENT DOCUMENTS (22) Filed: Nov. 5, 2003 EP O 574 213 A1 12, 1993 (65) Prior Publication Data OTHER PUBLICATIONS US 2004/O163528A1 Aug. 26, 2004 William H. Hayt Jr. & Jack E. Kemmerly, "Engineering Circuit s Analysis” 268-70.* Related U.S. Application Data (Continued) (60) Continuation of application No. 09/812,400, filed on Mar 19, 2001, now Pat. No. 7,786,370, which is a Primary Examiner - Marlo Fletcher division of application No. 09/313,533, filed on May (74) Attorney, Agent, or Firm — Craig W. Schmoyer 15, 1999, now Pat. No. 6,610,917. (57) ABSTRACT (60) Provisional application No. 60/085,713, filed on May 15, 1998. This invention provides a signal processing and signal Syn thesis technique from a family of signal processing and signal (51) Int. -

Numbers and Notes a Mathematical Approach to Musical Frequencies
Mathematical Theory and Modeling www.iiste.org ISSN 2224-5804 (Paper) ISSN 2225-0522 (Online) Vol.2, No.8, 2012 MATHEMUSIC – Numbers and Notes A Mathematical Approach To Musical Frequencies Saurabh Rawat 1* Bhaskar Nautiyal 2 Anushree Sah 3Adil Ahmed 4 Okesh Chhabra 5 Dept of Computer Science and Engg. - Graphic Era University Dept. of Electronics and Comm Engg- Graphic Era University University of Greenwich, London, U.K Dept of Computer Science and Engg. - Graphic Era Dept. of Management Studies. - Graphic Era University * E-mail of the corresponding author: [email protected] Abstract Mathematics and Music, the most sharply contrasted fields of scientific activity which can be found, and yet related, supporting each other, as if to show forth the secret connection which ties together all the activities of our mind [8]. Music theorists sometimes use mathematics to understand music. Mathematics is "the basis of sound" and sound itself "in its musical aspects... exhibits a remarkable array of number properties", simply because nature itself "is amazingly mathematical". In today’s technology, without mathematics it is difficult to imagine anything feasible. In this paper we have discussed the relation between music and mathematics. How piano keys are interrelated with mathematics, frequencies are correlated and discussed. Frequencies of musical instrument (piano) are analyzed using regression and geometric progression. Comparisons between both the methods are done in this paper. This paper will also be helpful for music seekers and mathematician to understand easily and practicing of musical instruments. Keywords: Musical notes, Regression analysis, Geometric progression. 1. Introduction Mathematics and music are interconnected topics. -
Truly 2. ED D
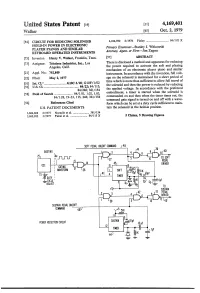
United States Patent (19) (11) 4,169,401 Walker 45) Oct. 2, 1979 54 CIRCUIT FOR REDUCING SOLENOID 4,104,950 8/1978 Finley ............................... 84/1.01 X HOLD-IN POWER IN ELECTRONIC PLAYER PANOS AND SIMILAR Primary Examiner-Stanley J. Witkowski KEYBOARD OPERATED INSTRUMENTS Attorney, Agent, or Firm-Jim Zegeer (75) Inventor: Henry V. Walker, Franklin, Tenn. 57 ABSTRACT (73) Assignee: Teledyne Industries, Inc., Los There is disclosed a method and apparatus for reducing Angeles, Calif. the power required to activate the soft and playing mechanism of an electronic player piano and similar 21 Appl. No.: 792,849 instruments. In accordance with the invention, full volt 22 Filed: May 2, 1977 age on the solenoid is maintained for a short period of 2 time which is more than sufficient to allow full travel of : s ; m G10C 3/3/4 the solenoid and then the power is reduced by reducing " " "746,36/, the applied voltage. In accordance with the preferred 58) Field of Search ...................... 84/101.102,103, embodiment, a timer is started when the solenoid is 84/1.28, 19-23, 115, 246; 361/154 commanded on and then when the timer times out, the e command gate signal is turned on and off with a wave 56) References Cited form which can be set at a duty cycle sufficient to main U.S. PATENT DOCUMENTS tain the solenoid in the held-in position. 3,864,608 2/1975 Normile et al. ...................... 361/154 3,868,882 3/1975 Fukui et al. ....................... 84/115 X 3 Claims, 5 Drawing Figures SOFT PEDAL ON/OFF COMMAND 4B 4. -

A Unified Helical Structure in 3D Pitch Space for Mapping Flat Musical Isomorphism
HEXAGONAL CYLINDRICAL LATTICES: A UNIFIED HELICAL STRUCTURE IN 3D PITCH SPACE FOR MAPPING FLAT MUSICAL ISOMORPHISM A Thesis Submitted to the Faculty of Graduate Studies and Research In Partial Fulfillment of the Requirements for the Degree of Master of Science in Computer Science University of Regina By Hanlin Hu Regina, Saskatchewan December 2015 Copytright c 2016: Hanlin Hu UNIVERSITY OF REGINA FACULTY OF GRADUATE STUDIES AND RESEARCH SUPERVISORY AND EXAMINING COMMITTEE Hanlin Hu, candidate for the degree of Master of Science in Computer Science, has presented a thesis titled, Hexagonal Cylindrical Lattices: A Unified Helical Structure in 3D Pitch Space for Mapping Flat Musical Isomorphism, in an oral examination held on December 8, 2015. The following committee members have found the thesis acceptable in form and content, and that the candidate demonstrated satisfactory knowledge of the subject material. External Examiner: Dr. Dominic Gregorio, Department of Music Supervisor: Dr. David Gerhard, Department of Computer Science Committee Member: Dr. Yiyu Yao, Department of Computer Science Committee Member: Dr. Xue-Dong Yang, Department of Computer Science Chair of Defense: Dr. Allen Herman, Department of Mathematics & Statistics Abstract An isomorphic keyboard layout is an arrangement of notes of a scale such that any musical construct has the same shape regardless of the root note. The mathematics of some specific isomorphisms have been explored since the 1700s, however, only recently has a general theory of isomorphisms been developed such that any set of musical intervals can be used to generate a valid layout. These layouts have been implemented in the design of electronic musical instruments and software applications. -

Absolute Pitch and Its Frequency Range
ARCHIVES OF ACOUSTICS DOI: 10.2478/v10168-011-0020-1 36, 2, 251–266 (2011) Absolute Pitch and Its Frequency Range Andrzej RAKOWSKI, Piotr ROGOWSKI The Fryderyk Chopin University of Music Okólnik 2, 00-368 Warszawa, Poland e-mail: [email protected] (received March 24, 2011; accepted May 4, 2011 ) This paper has two distinct parts. Section 1 includes general discussion of the phenomenon of “absolute pitch” (AP), and presentation of various concepts concern- ing definitions of “full”, “partial” and “pseudo” AP. Sections 2–4 include presentation of the experiment concerning frequency range in which absolute pitch appears, and discussion of the experimental results. The experiment was performed with partici- pation of 9 AP experts selected from the population of 250 music students as best scoring in the pitch-naming piano-tone screening tests. Each subject had to recog- nize chromas of 108 pure tones representing the chromatic musical scale of nine octaves from E0 to D#9. The series of 108 tones was presented to each subject 60 times in random order, diotically, with loudness level about 65 phon. Percentage of correct recognitions (PC) for each tone was computed. The frequency range for the existence of absolute pitch in pure tones, perceived by sensitive AP possessors stretches usually over 5 octaves from about 130.6 Hz (C3) to about 3.951 Hz (B7). However, it was noted that in a single case, the upper boundary of AP was 9.397 Hz (D9). The split-halves method was applied to estimate the reliability of the obtained results. Keywords: auditory memory, pitch, absolute pitch. -

353 383 4H 523 U.S
US006194646B1 (12) United States Patent (10) Patent N0.: US 6,194,646 B1 Kowalski (45) Date of Patent: Feb. 27, 2001 (54) MUSICAL KEYBOARDS PLAYING NEW (56) References Cited KINDS OF MUSIC U.S. PATENT DOCUMENTS (76) Inventor: Andrzej Kowalski, ul Konduktorska 1a 5,430,913 * 7/1995 Kotschy ........................... .. 84/423 R m. 43, PLOO -775 Warsaw (PL) 5,516,981 * 5/1996 Nagai 84/615 5,549,029 * 8/1996 Lepinski ............................ .. 84/4832 Notice: Subject to any disclaimer, the term of this patent is extended or adjusted under 35 FOREIGN PATENT DOCUMENTS U.S.C. 154(b) by 0 days. 8316109 * 1/1985 (AU) . (21) Appl. No.: 09/270,144 * cited by examiner Filed: Mar. 16, 1999 Primary Examiner—Robert E. Nappi (22) Assistant Examiner—Shih-yung Hsieh Related US. Application Data (74) Attorney, Agent, or Firm—Erik M. Arnhem (60) Provisional application No. 60/074,321, ?led on Feb. 11, (57) ABSTRACT 1998. A neW musical keyboard and musical scale is provided by (51) Int. Cl.7 ..................................................... .. G10C 3/12 subdividing each octave into a larger number of parts, or notes. In one case, each octave contains sixteen notes, rather (52) US. Cl. .......................... .. 84/423 R; 84/424; 84/425; than the conventional tWelve. In another case, each octave 84/427; 84/428; 84/451 contains tWenty notes. The neW musical system enables neW musical sounds and special effects to be created. (58) Field of Search ................................ .. 84/423 R, 424, 84/425, 427, 428, 451 2 Claims, 1 Drawing Sheet (_ 353 383 4H 523 U.S. Patent Feb. -

Non-Electrophonic Cyborg Instruments: Playing on Everyday Things As If the Whole World Were One Giant Musical Instrument
Non-Electrophonic Cyborg Instruments: Playing on Everyday Things as if the Whole World were One Giant Musical Instrument Steve Mann, Ryan Janzen, Raymond Lo, and James Fung Dept. of Electrical and Computer Engineering University of Toronto http://www.eyetap.org/publications/ ABSTRACT Categories and Subject Descriptors We introduce a new musical instrument in which computa- H.5.2 [Info. systems]: Info. interfaces and presentation— tion is used to modify acoustically generated sounds. The User Interfaces; I.4.9 [Computing Methodologies]: Im- acoustically generated sounds originate from real physical age Processing and Computer Vision; J.5 [Computer ap- objects in the user’s environment. These sounds are picked plications]: Arts and Humanities up by one or more microphones connected to a camera phone which filters the sounds using filters whose coefficients change in response to subject matter present in view of the camera. General Terms In one example, a row of 12 image processing zones is pre- Design, Experimentation, Human Factors, Performance sented such that sounds originating from real world objects in the first zone are mapped to the first note on a musical scale, sounds originating from the second zone are mapped Keywords to the second note of the musical scale, and so on. Thus a Fluid-user-interfaces, fluid sampling, tangible user interfaces, user can hit a cement wall or sidewalk, or the ground, and water-based immersive multimedia, hydraulophones, inter- the camera phone will transform the resulting sound (e.g. a active art, cyborg, aquaborg, waterborg, frolic, frolicious, dull “thud”) into a desired sound, such as the sound of tubu- FUNtain (TM), harmellotron, harmelody, urban beach, urbeach, lar bells, chimes, or the like.