10 Startup 1 10.1 General Startup Instructions 2
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Cape Town's Film Permit Guide
Location Filming In Cape Town a film permit guide THIS CITY WORKS FOR YOU MESSAGE FROM THE MAYOR We are exceptionally proud of this, the 1st edition of The Film Permit Guide. This book provides information to filmmakers on film permitting and filming, and also acts as an information source for communities impacted by film activities in Cape Town and the Western Cape and will supply our local and international visitors and filmmakers with vital guidelines on the film industry. Cape Town’s film industry is a perfect reflection of the South African success story. We have matured into a world class, globally competitive film environment. With its rich diversity of landscapes and architecture, sublime weather conditions, world-class crews and production houses, not to mention a very hospitable exchange rate, we give you the best of, well, all worlds. ALDERMAN NOMAINDIA MFEKETO Executive Mayor City of Cape Town MESSAGE FROM ALDERMAN SITONGA The City of Cape Town recognises the valuable contribution of filming to the economic and cultural environment of Cape Town. I am therefore, upbeat about the introduction of this Film Permit Guide and the manner in which it is presented. This guide will be a vitally important communication tool to continue the positive relationship between the film industry, the community and the City of Cape Town. Through this guide, I am looking forward to seeing the strengthening of our thriving relationship with all roleplayers in the industry. ALDERMAN CLIFFORD SITONGA Mayoral Committee Member for Economic, Social Development and Tourism City of Cape Town CONTENTS C. Page 1. -

Directions to Dulwich Road Parking Area
SSISA CONFERENCE CENTRE - DIRECTIONS TO DULWICH ROAD PARKING AREA From M3 / Cape Town Parking NEWLANDS RUGBY STADIUM SSISA SA Breweries NEWLANDS CRICKET STADIUM From Claremont Main Road Please take note: Shuttle service will be available for delegates (white VW Combi) Alternatively a ~100m leisurely walk down Boundary road past the Newlands Rugby Stadium Driving directions to Dulwich Parking from the N1 Head west on N1 Rd 9,7 km Take exit 7A to merge onto M5 toward Maitland/Muizenberg 3,7 km Take exit 9B to merge onto N2 Rd/Settlers Wy toward Cape Town 1,8 km Take exit 7 for M4/Main Road 300 m Turn left onto Main Rd/M4 3,1 km Turn left onto Boundary Rd 250 m Turn left at the traffic circle At the yield sign turn left Destination will be straight ahead Driving directions to Dulwich Parking from Cape Town International Head south 280 m Keep left at the fork 300 m Slight left toward Airport Approach Rd 150 m Turn right toward Airport Approach Rd 400 m Take the 1st left onto Airport Approach Rd 1,6 km Merge onto N2 Rd/Settlers Wy via the ramp to Cape town 10,4 km Take exit 7 for M4/Main Road 300 m Turn left onto Main Rd/M4 3,1 km Turn left onto Boundary Rd 250 m Turn left at the traffic circle At the yield sign turn left Driving directions to Dulwich Parking from Cape Town City Centre Head southeast on Eastern Blvd toward Exit 2,9 km Continue onto De Waal Dr 900 m Continue onto Rhodes Dr 2,3 km Take exit 8 for Princess Anne Avenue toward M146 230 m Merge onto Princess Anne Ave 180 m Continue onto Klipper Rd 550 m Turn right onto Main Rd 450 m Turn left onto Boundary Rd 250 m Turn left at the traffic circle At the yield sign turn left . -

Some of the Best Radio Stations to Listen to on the N1, N2 and N3 Get A
Some of the best radio stations to listen to on the N1, N2 and N3 If your job requires long distance driving, you will probably find yourself on the main highways in JHB: Kaya FM 95.9 From adult contemporary South Africa linking Johannesburg to Durban and music to smooth sounds like R&B, World Music and Cape Town, and Cape Town to Durban. These Soul and Jazz. journeys can be very long and tiring so to keep Engen Johannesburg you awake when you are on the N1, N2 or N3 routes, here are some of the best community radio Engen Kroonstad stations in South Africa to listen to, with a variety of different sounds to keep you company on the road: Engen Bloemfontein Engen Pietermaritzberg Engen Harrismith Engen Durban Engen Colesburg Harrismith: Lesedi FM 106.6 A mix of Pop, traditional African & contemporary African music. DBN: East Coast Radio 95.90 FM Multiple genres of music ranging Engen Beaufort West from Pop to Rock, Alternative and R&B. Engen Laingsburg Karoo: Gamka FM 87.6 Engen De Doorns In the heart of the central Karoo. Music genres include religious music, Jazz, Dance music, R&B, Afrikaans music, and more. Engen Worcester Eastern Cape: Algoa FM 94-97 CPT: Smile FM 90.4 Adult contemporary radio station Cape Town’s best mix broadcasting between 94-97 fm stereo. Engen Cape Town of the 80’s; 90’s and now. Engen Albertinia Engen Grabouw Don’t forget to stop off at Engen service stations across the country to refuel and refresh, they are proud partners with Avis Fleet. -

DIRECTIONS from CAPE TOWN Take the N1 Highway out of the City and Then Take the N7 Highway in the Direction of Malmesbury. Cont
DIRECTIONS FROM CAPE TOWN Take the N1 highway out of the city and then take the N7 highway in the direction of Malmesbury. Continue on the N7 for approx. 220km. Just after you start seeing the Clanwilliam Dam, look out for the off-ramp (to the left). At the T-junction you turn right to travel into the town of Clanwilliam. Stay on this road, passing two petrol stations on the left hand side. (Do NOT turn off to the right into the Main Road.) Stay on this road to travel out of the town in the direction of the mountain range. Approx 2km from the town (after a small hill), you turn left onto the road with a green signpost for Klawer. Look at your speedometer and note your kilometers. Approx 3.1 km on this road, you will see our gate & sign on the right hand side. Drive through our gate and up to the lodge. DIRECTIONS FROM THE WINELANDS There are a variety of routes depending on whether you are coming.If you are coming from Stellenbosch, take the R304 north. This road crosses over the main N2 highway and continues north to Malmesbury where the R304 merges with the R302 to continue as the R302. When you get to the town of Malmesbury, you follow signs for the N7 north towards Mooreesburg, PIketberg. Stay on the N7 for 158km and when you get to Clanwilliam, you follow the directions below…. If you are coming from Franschhoek or Paarl, travel to and through Paarl and then take the R44 north past Wellington. -

AC097 FA Cape Town City Map.Indd
MAMRE 0 1 2 3 4 5 10 km PELLA ATLANTIS WITSAND R27 PHILADELPHIA R302 R304 KOEBERG R304 I CAME FOR DUYNEFONTEIN MAP R45 BEAUTIFULR312 M19 N7 MELKBOSSTRAND R44 LANDSCAPES,PAARL M14 R304 R302 R27 M58 AND I FOUND Blaauwberg BEAUTIFULN1 PEOPLE Big Bay BLOUBERGSTRAND M48 B6 ROBBEN ISLAND PARKLANDS R302 KLAPMUTS TABLE VIEW M13 JOOSTENBERG KILLARNEY DURBANVILLE VLAKTE City Centre GARDENS KRAAIFONTEIN N1 R44 Atlantic Seaboard Northern Suburbs SONSTRAAL M5 N7 Table Bay Sunset Beach R304 Peninsula R27 BOTHASIG KENRIDGE R101 M14 PLATTEKLOOF M15 Southern Suburbs M25 EDGEMEAD TYGER VALLEY MILNERTON SCOTTSDENE M16 M23 Cape Flats M8 BRACKENFELL Milnerton Lagoon N1 Mouille Point Granger Bay M5 Helderberg GREEN POINT ACACIA M25 BELLVILLE B6 WATERFRONT PARK GOODWOOD R304 Three Anchor Bay N1 R102 CAPE TOWN M7 PAROW M23 Northern Suburbs STADIUM PAARDEN KAYAMANDI SEA POINT EILAND R102 M12 MAITLAND RAVENSMEAD Blaauwberg Bantry Bay SALT RIVER M16 M16 ELSIESRIVIER CLIFTON OBSERVATORY M17 EPPING M10 City Centre KUILS RIVER STELLENBOSCH Clifton Bay LANGA INDUSTRIA M52 Cape Town Tourism RHODES R102 CAMPS BAY MEMORIAL BONTEHEUWEL MODDERDAM Visitor Information Centres MOWBRAY N2 R300 M62 B6 CABLE WAY ATHLONE BISHOP LAVIS M12 M12 M3 STADIUM CAPE TOWN TABLE MOUNTAIN M5 M22 INTERNATIONAL Police Station TABLE RONDEBOSCH ATHLONE AIRPORT BAKOVEN MOUNTAIN NATIONAL BELGRAVIA Koeël Bay PARK B6 NEWLANDS RYLANDS Hospital M4 CLAREMONT GUGULETU DELFT KIRSTENBOSCH M54 R310 Atlantic Seaboard BLUE DOWNS JAMESTOWN B6 Cape Town’s Big 6 M24 HANOVER NYANGA Oude Kraal KENILWORTH PARK -

City of Cape Town Profile
2 PROFILE: CITY OF CAPETOWN PROFILE: CITY OF CAPETOWN 3 Contents 1. Executive Summary ........................................................................................... 4 2. Introduction: Brief Overview ............................................................................. 8 2.1 Location ................................................................................................................................. 8 2.2 Historical Perspective ............................................................................................................ 9 2.3 Spatial Status ....................................................................................................................... 11 3. Social Development Profile ............................................................................. 12 3.1 Key Social Demographics ..................................................................................................... 12 3.1.1 Population ............................................................................................................................ 12 3.1.2 Gender Age and Race ........................................................................................................... 13 3.1.3 Households ........................................................................................................................... 14 3.2 Health Profile ....................................................................................................................... 15 3.3 COVID-19 ............................................................................................................................ -
Southern Suburbs
MAITLAND N7 MAITLAND Durbanville Ave P la tte kl oo f R d PLATTEKLOOF MILNERTON EDGEMEAD TYGERVALLEY d R g r e Old Oak Rd eb o K Durban Rd N1 N1 M25 N1 Marine Dr. GOODWOOD M5 M7 Voortrekker Rd R102 PAROW N1 R102 SALT RIVER SOUTHERN M16 Eastern Blvd OBSERVATORY M7 V ic to r ia SUBURBS R The Heart of d Cape Town Museum M57 Groote Schuur PINELANDS Vincent Pallotti MAP Rhodes Memorial M52 9 LANGA Durban Rd St Peters Rd M5 University of CABLE WAY Cape Town Cape Town Tourism Mostert’s Mill MOWBRAY Visitor Information Centres Irma Stern Museum ROSEBANK Police Station M62 Woolsack Dr. Liesbeek Parkway ATHLONE Hospital Baxter Theatre Centre Red Cross Places of Interest Children’s Hospital Klipfontein Rd M3 TABLE MOUNTAIN Princess Anne Ave. Train Line RONDEBOSCH M6 CAPE TOWN NATIONAL PARK M7 N2 Transport Information Centre INTERNATIONAL Klippe Newlands Rugby Stadium +27 (0)800 656 463 r Rd BAKOVEN SA Rugby Museum NEWLANDS AIRPORT 6 8 Josephine Mill Newlands Kromboom Rd GUGULETU Newlands Cricket Ground Swimming Pool Jan Smuts Dr. 7 Milner Rd M43 RYLANDS Newlands Ave. RONDEBOSCH 1 EAST CLAREMONT Kirstenbosch National M17 DELFT M6 Main Rd Botanical Gardens Protea Rd Cavendish Square Lansdowne Rd Rhodes Ave. d Chichester Rd R BISHOPSCOURT Newlands Rd l e h c rs e H M4 M24 HANOVER PARK LANSDOWNE Kenilworth NYANGA N2 Chart Farm Race Course Rosmead Ave T ro va 4 to Link KENILWORTH Wynberg Park W Wetton Rd M9 a t Wynberg 2 Military e M63 r l o o R M3 d 10 5 YOUNGSFIELD WETTON 3 WYNBERG M28 OTTERY M63 Victoria PHILIPPI Ottery Rd Gabriel Rd M41 M5 M7 CONSTANTIA C on d PLUMSTEAD sta R 2 ntia Main Constantiaberg Groot Constantia M10 M42 DIEP RIVER Victoria Rd TOP 10 MUST-DO EXPERIENCES S t Kendal Rd r a nd f o n t De Waal Rd e i Kirstenbosch: Stroll through the Montebello Design Centre: For n 1 6 M38 Rd National Botanical Gardens and a creative morning out, visit Klein Constantia MITCHELLS BERGVLIET SOUTHFIELD Klip Rd PLAIN pay a visit to the new ‘Boomslang’ the artists’ studios, shop their Buitenverwachting Victoria Rd canopy walkway. -

Fifa 2010 World Cup
FIFA 2010 WORLD CUP Transport Technical Report Part B July 2003 Prepared by: CSIR HHO Africa Arup Contact person: Mr Richard Gordge CSIR Transportek P O Box 395 Stellenbosch South Africa 7599 Tel: +27 21 888-2611 Fax: +27 21 888-2694 Email: [email protected] Date: July 2003 PART B FIFA 2010 World Cup Contents 1. GAUTENG_________________________________________ 1 1.1 General Transport Review ___________________________________________ 1 1.2 Transport Mode Split ________________________________________________ 1 1.3 Airports_____________________________________________________________ 2 1.4 Road Network _______________________________________________________ 2 1.4.1 National Links ________________________________________________________ 2 1.4.2 Gauteng Network ______________________________________________________ 3 1.4.3 Patterns of Demand for Road Space______________________________________ 3 1.4.4 Congestion Management Strategy ________________________________________ 3 1.4.5 Road Infrastructure Upgrade Programs___________________________________ 4 1.4.6 Major Road Routes for the FIFA 2010 World Cup _______________________ 4 1.5 Public Transport ____________________________________________________ 5 1.5.1 Overview ______________________________________________________________ 5 1.5.2 Gautrain Rapid Rail___________________________________________________ 7 1.5.3 Rail Extensions and Stations ____________________________________________ 8 1.6 Key Issues relating to the Effective Hosting of the FIFA 2010 World Cup ________________________________________________________________ -

The Great Green Outdoors
R ive r S w r a r ive t r r R ivi ve e i p r e R i 01 WITZANDS AQUIFER NATURE RESERVE D Cape Town is the world’s #1 water-saving city. S p w e i a D Please keep using water wisely. r t MAMRE r i Protecting the Atlantis aquifer and the THE GREAT GREEN OUTDOORS vi e aquifer re-charge areas, it is the main r FOR MORE VISIT C APETOWN.GOV.ZA / THINKWATER water supply for the Atlantis, Mamre FOLLOW @CITYOFCT ON FACEBOOK AND TWITTER Sustaining Cape Town’s Water Supply GOUDA and Pella communities. The reserve FOR MORE VISIT C APETOWN.GOV.ZA / THINKWATER has impressive sand dunes and views of Table Mountain. Add on a visit to FOLLOW @CITYOFCT ON FACEBOOK AND TWITTER the quaint mission village of Mamre, ATLANTIS RIEBEEK VOELVLEI DAM KASTEEL Only flush when Take short, stop- Don’t leave the established in the 17th century. The Cape Town is a water-scarce city that is diversifying its sources of water, but it you really need to. start showers. tap running while original water mill has been restored brushing teeth. still gets most of its water from rain-fed dams. The catchment areas feeding our WATER WOLSELEY and is used as a museum today. dams are relatively pristine, but need to be preserved. The alien invasive plants REPORTING in the catchments suck up water before it can get to our dams, and there are HERMON Help preserve our precious water resources. D WITZANDS i e To report burst pipes, faulty p R SILWERSTROOMSTRAND AQUIFER ive programmes to remove them to increase the yield of water to the Western Cape r Use alternative water safely. -

Directions from the N1
DIRECTIONS FROM THE N1 (CAPE TOWN) • Follow the N1 north towards Paarl • Take the off ramp at Exit 39 (Stellenbosch/Klipheuwel) • At T-junction, turn right into R304 towards Stellenbosch • On entering Stellenbosch, turn left at the traffic lights into the R44 (Klapmuts) towards Paarl • At the next traffic lights, turn right into R310 (Helshoogte Rd) towards Franschoek • Continue to the next traffic light (approx 1.5 km) and turn left into Rustenberg Rd at Idas Valley • Follow Rustenberg road, over the speed bump and circle until you reach a T-junction • Turn right into Lelie road and follow the signposts towards The Hydro • You will drive past Rustenberg Estate at which the road bends to the right and climbs a hill (you are still in Lelie road) • Continue until you reach the main entrance of The Hydro • Security will welcome you at the front gate and guide you up to the guest parking area and front desk. FROM THE N2 (AIRPORT) • On leaving the Airport, take the off-ramp into N2 towards Somerset West • Take the R310 Baden-Powel Dr (Stellenbosch) off-ramp and turn left towards Stellenbosch • Keep straight along this road (through traffic lights) and you will pass “Die Wijnlanden Village” and “Spier Wine Estate” on your right • At the next T-junction turn right towards Stellenbosch (You will pass “Asara Wine Estate” and “Distell) • After passing Stellenbosch Railway Station on your left, you reach traffic lights at which you turn left into the R44 (Adam Tas Rd) ( Along this road you will pass “Bergkelder Wine Estate”, Simonsberg Cheese and a Hydro billboard) • Cross over at the Bird St traffic lights, continue up the hill and turn right at the next traffic light into the R310 (Helshoogte Rd) towards Franschoek • Continue to the next traffic light (approx. -

Cape Town, Town, South South Africa Africa Scenicmother Beauty City With– Scenic a Cosmopolitan Beauty with Beat a Cosmopolitan Beat
DestinationDestination Showcase: Showcase: CapeCape Town, Town, South South Africa Africa ScenicMother beauty city with– Scenic a cosmopolitan beauty with beat a cosmopolitan beat Telephone +27 +27 11 21 219 447 5600 4021 FacsimileFacsimile +27 +27 11 21 268 447 2010/1 4031 P170 O BoxLower 987 Main Road NorthlandsObservatory 2116 7925 JohannesburgCape Town South South Africa Africa www.greenroute.co.za www.dragonfly.co.za Innovative destination management specialists Southern Africa’s Leading Travel Group Exceeding Expectations Cape Town – South Africa Map of Cape Town N7 Robben Island N1 V&A Waterfront H1 H2 H1 Cape Grace Hotel Green Point H5 Bo-Kaap Sea Point H3 H4 H2 Table Bay Hotel Signal Hill H6 Clifton Victoria Drive H3 Mount Nelson Hotel District 6 Table DeWaal Drive Airport Mountain Rhodes H4 Westin Cape Town Camps Bay Memorial Groote Schuur Estate Rondebosch One & Only Cape Town N7 UCT H5 Kirstenbosch Gardens Bishops Claremont N2 12 Apostles Court H6 Taj Cape Town Robben Island N1 Llandudno Constantia V&A Waterfront Constantia City centre H1 Sandy BayH2 H1 Cape Grace Hotel Green Point H5 Constantia M5 Bo-Kaap Nek Sea Point H3 H4 H2 Table Bay Hotel Signal HillHout Bay Tokai H6 Harbour Clifton Victoria M3 Baden Powell Drive Drive Chapmans Peak H3 Mount Nelson Hotel District 6 Table DeWaal Drive Airport Mountain Rhodes H4 Westin Cape Town Camps Bay Memorial Groote Schuur Estate Rondebosch One & Only Cape Town UCT H5 Kirstenbosch M6 Penguin colony Gardens Bishops ClaremoOunt Kaapseweg MuizenburgN2 12 ApostlesNoordhoe Courkt H6 Taj Cape Town M64 Boyes Drive Llandudno Constantia St. James Constantia City centre Sandy Bay Sun Valley N1 Constantia M5 Kalk Bay Nek National roads Hout Bay KommetjieTokai M55 M65 Fish Hoek M3 Ocean View Baden Powell Drive Harbour Chapmans Peak Glencairn Vineyard Witsand M6 Penguin colony Noordhoek Ou Kaapseweg Muizenburg M64 Boyes Drive 12 Apostles St. -
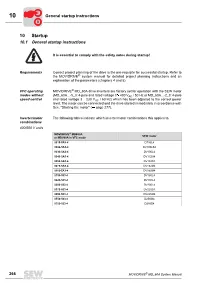
10 Startup 10.1 General Startup Instructions
I General startup instructions 0 10 Startup 10.1 General startup instructions It is essential to comply with the safety notes during startup! Requirements Correct project planning of the drive is the pre-requisite for successful startup. Refer to the MOVIDRIVE® system manual for detailed project planning instructions and an explanation of the parameters (chapters 4 and 5). VFC operating MOVIDRIVE® MD_60A drive inverters are factory set for operation with the SEW motor modes without (MD_60A...-5_3: 4-pole and rated voltage 3 400 VAC / 50 Hz or MD_60A...-2_3: 4-pole speed control and rated voltage 3 230 VAC / 60 Hz) which has been adjusted to the correct power level. The motor can be connected and the drive started immediately in accordance with Sec. "Starting the motor" ( page 277). Inverter/motor The following tables indicate which inverter/motor combinations this applies to. combinations 400/500 V units MOVIDRIVE® MDF60A SEW motor or MDV60A in VFC mode 0015-5A3-4 DT90L4 0022-5A3-4 DV100LS4 0030-5A3-4 DV100L4 0040-5A3-4 DV112M4 0055-5A3-4 DV132S4 0075-5A3-4 DV132M4 0110-5A3-4 DV160M4 0150-503-4 DV160L4 0220-503-4 DV180L4 0300-503-4 DV200L4 0370-503-4 DV225S4 0450-503-4 DV225M4 0550-503-4 D250M4 0750-503-4 D280S4 266 MOVIDRIVE® MD_60A System Manual I General startup instructions 0 230 V units MOVIDRIVE® MDF60A SEW motor or MDV60A in VFC mode 0015-2A3-4 DT90L4 0022-2A3-4 DV100LS4 0037-2A3-4 DV100L4 0055-2A3-4 DV132S4 0075-2A3-4 DV132M4 0110-203-4 DV160M4 0150-203-4 DV180M4 0220-203-4 DV180L4 0300-203-4 DV225S4 The startup functions described in this section are used for setting the inverter so it is optimally adapted to the motor which is actually connected and to the given boundary conditions.