Conceptual Design for a Supersonic Advanced Military Trainer
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Aviation Machinist's Mate 3 & 2
NONRESIDENT TRAINING COURSE Aviation Machinist’s Mate 3 & 2 NAVEDTRA 14008 DISTRIBUTION STATEMENT A: Approved for public release; distribution is unlimited. PREFACE About this course: This is a self-study course. By studying this course, you can improve your professional/military knowledge, as well as prepare for the Navywide advancement-in-rate examination. It contains subject matter about day- to-day occupational knowledge and skill requirements and includes text, tables, and illustrations to help you understand the information. An additional important feature of this course is its reference to useful information in other publications. The well-prepared Sailor will take the time to look up the additional information. History of the course: • Sep 1991: Original edition released. Prepared by ADCS(AW) Terence A. Post. • Jan 2004: Administrative update released. Technical content was not reviewed or revised. Published by NAVAL EDUCATION AND TRAINING PROFESSIONAL DEVELOPMENT AND TECHNOLOGY CENTER TABLE OF CONTENTS CHAPTER PAGE 1. Jet Engine Theory and Design ............................................................................... 1-1 2. Tools and Hardware ............................................................................................... 2-1 3. Aviation Support Equipment.................................................................................. 3-1 4. Jet Aircraft Fuel and Fuel Systems ........................................................................ 4-1 5. Jet Aircraft Engine Lubrication Systems .............................................................. -

SP2016-3124855 a Generic Thermodynamic Assessment Of
SP2016-3124855 A Generic Thermodynamic Assessment of Reusable High-Speed Vehicles V. Fernandez Villace, J. Steelant ESA-ESTEC, Section of Aerothermodynamics and Propulsion Analysis Keplerlaan 1, 2200 AG Noordwijk, The Netherlands Email: [email protected], [email protected] ABSTRACT Lifting based vehicles for either space transportation or sustained hypersonic cruise are exposed to high thermal loads during the atmospheric trajectory. The thermal protection system has therefore to efficiently manage the thermal load that penetrates the aeroshell in order to guarantee a satisfactory mission performance. In the present study, the thermal endurance of a LH2-fuelled Mach 8 hypersonic cruiser is assured by soaking the thermal load across the aeroshell into the on-board tank system. The so-produced boil-off acts as a coolant for other aircraft subsystems, like the cabin environmental control system. Further, in order to avoid over-board dumping of the vaporized fuel, a boil-off compression system is proposed to inject the fuel into the propulsion plant. The numerical approach comprised a detailed model of the airframe, where the heat transfer across the interfacing areas between the different subsystems, namely tanks, cabin, propulsion plant and the aeroshell, was resolved based on one-dimensional engineering models. This methodology allowed the evaluation of the complete mission cycle, from the apron, through taxiing and airborne phases and back to apron. 1. INTRODUCTION 2. PRELIMINARY EVALUATION The thermal management of cruising high-speed One of the purposes of the present study was to aircraft plays a very important role. These vehicles design a thermodynamic cycle able to balance the are submitted to high heat loads originating from the airframe thermal and mechanical loads. -

Taiwan's Indigenous Defense Industry: Centralized Control of Abundant
Taiwan’s Indigenous Defense Industry: Centralized Control of Abundant Suppliers David An, Matt Schrader, Ned Collins-Chase May 2018 About the Global Taiwan Institute GTI is a 501(c)(3) non-profit policy incubator dedicated to insightful, cutting-edge, and inclusive research on policy issues regarding Taiwan and the world. Our mission is to enhance the relationship between Taiwan and other countries, especially the United States, through policy research and programs that promote better public understanding about Taiwan and its people. www.globaltaiwan.org About the Authors David An is a senior research fellow at the Global Taiwan Institute. David was a political-military affairs officer covering the East Asia region at the U.S. State Department from 2009 to 2014. Mr. An received a State Department Superior Honor Award for initiating this series of political-military visits from senior Taiwan officials, and also for taking the lead on congressional notification of U.S. arms sales to Taiwan. He received his M.A. from UCSD Graduate School of Global Policy and Strategy and his B.A. from UC Berkeley. Matt Schrader is the Editor-in-Chief of the China Brief at the Jamestown Foundation, MA candidate at Georgetown University, and previously an intern at GTI. Mr. Schrader has over six years of professional work experience in China. He received his BA from the George Washington University. Ned Collins-Chase is an MA candidate at Johns Hopkins School of Advanced International Studies, and previously an intern at GTI. He has worked in China, been a Peace Corps volunteer in Mo- zambique, and was also an intern at the US State Department. -

7. Transonic Aerodynamics of Airfoils and Wings
W.H. Mason 7. Transonic Aerodynamics of Airfoils and Wings 7.1 Introduction Transonic flow occurs when there is mixed sub- and supersonic local flow in the same flowfield (typically with freestream Mach numbers from M = 0.6 or 0.7 to 1.2). Usually the supersonic region of the flow is terminated by a shock wave, allowing the flow to slow down to subsonic speeds. This complicates both computations and wind tunnel testing. It also means that there is very little analytic theory available for guidance in designing for transonic flow conditions. Importantly, not only is the outer inviscid portion of the flow governed by nonlinear flow equations, but the nonlinear flow features typically require that viscous effects be included immediately in the flowfield analysis for accurate design and analysis work. Note also that hypersonic vehicles with bow shocks necessarily have a region of subsonic flow behind the shock, so there is an element of transonic flow on those vehicles too. In the days of propeller airplanes the transonic flow limitations on the propeller mostly kept airplanes from flying fast enough to encounter transonic flow over the rest of the airplane. Here the propeller was moving much faster than the airplane, and adverse transonic aerodynamic problems appeared on the prop first, limiting the speed and thus transonic flow problems over the rest of the aircraft. However, WWII fighters could reach transonic speeds in a dive, and major problems often arose. One notable example was the Lockheed P-38 Lightning. Transonic effects prevented the airplane from readily recovering from dives, and during one flight test, Lockheed test pilot Ralph Virden had a fatal accident. -

HELP from ABOVE Air Force Close Air
HELP FROM ABOVE Air Force Close Air Support of the Army 1946–1973 John Schlight AIR FORCE HISTORY AND MUSEUMS PROGRAM Washington, D. C. 2003 i Library of Congress Cataloging-in-Publication Data Schlight, John. Help from above : Air Force close air support of the Army 1946-1973 / John Schlight. p. cm. Includes bibliographical references and index. 1. Close air support--History--20th century. 2. United States. Air Force--History--20th century. 3. United States. Army--Aviation--History--20th century. I. Title. UG703.S35 2003 358.4'142--dc22 2003020365 ii Foreword The issue of close air support by the United States Air Force in sup- port of, primarily, the United States Army has been fractious for years. Air commanders have clashed continually with ground leaders over the proper use of aircraft in the support of ground operations. This is perhaps not surprising given the very different outlooks of the two services on what constitutes prop- er air support. Often this has turned into a competition between the two serv- ices for resources to execute and control close air support operations. Although such differences extend well back to the initial use of the airplane as a military weapon, in this book the author looks at the period 1946- 1973, a period in which technological advances in the form of jet aircraft, weapons, communications, and other electronic equipment played significant roles. Doctrine, too, evolved and this very important subject is discussed in detail. Close air support remains a critical mission today and the lessons of yesterday should not be ignored. This book makes a notable contribution in seeing that it is not ignored. -

0218-DG-Defnews-Asian-Fighter
ASIA FIGHTER REVIEW Asia Fighter Review Singapore shops for new platforms as part of Air Force transformation BY MIKE YEO ly completed taking delivery of 40 Boeing F-15SG [email protected] Strike Eagle multirole fighters, which serve alongside other aircraft and helicopters such as MELBOURNE, Australia — The Republic of Sin- Lockheed Martin F-16C/D Block 52/52+ Fighting gapore Air Force celebrates its 50th anniversary Falcons and Boeing AH-64D Apache helicopter this year as it continues its transformation into gunships. a modern fighting force, with the service due to The Air Force will also start taking delivery of take delivery of new platforms this year amid a the first of six Airbus A330 Multi-Role Tanker number of ongoing procurement programs. Transports, which will replace four ex-U.S. Air The Southeast Asian island nation — which Force KC-135 Stratotankers acquired in the late measures roughly one-third the size of the U.S. 1990s along with five Lockheed Martin KC-130B/H state of Rhode Island in terms of land area and Hercules tankers/transports, which have now is strategically located at the southern end of the gone back to serve as airlifters in Singapore’s Air Straits of Malacca, through which a significant Force alongside five C-130Hs. portion of the world’s maritime trade passes — The service is also expected to receive two is a security cooperation partner of the United Lockheed Martin S-70B Seahawk anti-submarine States and operates one of the most advanced helicopters this year, bringing its fleet to eight. -

Journal of Air Power and Space Studies Vol
AIR POWER Journal of Air Power and Space Studies Vol. 14 No. 4 • Winter 2019 (October-December) Contributors Air Marshal Ramesh Rai • Air Marshal Anil Chopra • Dr Joshy M. Paul • Ms Bhavna Singh • Ms Zoya Akhter Fathima • Ms Urmi Tat • Mr Jayesh Khatu CENTRE FOR AIR POWER STUDIES, NEW DELHI AIR POWER Journal of Air Power and Space Studies Vol. 14 No. 4, Winter 2019 (October-December) CENTRE FOR AIR POWER STUDIES VISION To be an independent centre of excellence on national security contributing informed and considered research and analyses on relevant issues. MISSION To encourage independent and informed research and analyses on issues of relevance to national security and to create a pool of domain experts to provide considered inputs to decision-makers. Also, to foster informed public debate and opinion on relevant issues and to engage with other think-tanks and stakeholders within India and abroad to provide an Indian perspective. CONTENTS Editor’s Note v 1. Combining Cyber with Air Force Operations 1 Ramesh Rai 2. China’s Aviation Industry Pulling Ahead, Yet Critical Technology Challenges 19 Anil Chopra 3. China’s Active Defence Strategy: A Maritime Perspective 49 Joshy M. Paul 4. China and Russia: New Dreams or A Marriage of Convenience? 77 Bhavna Singh 5. Status of Global Nuclear Energy: A Survey 103 Zoya Akhter Fathima 6. Development as a Form of Diplomacy: Tracing its Roots and Relevance 139 Urmi Tat 7. Myanmar: Undertstanding Political and Social Dynamics 183 Jayesh Khatu EDITOr’s NOTE The year just gone by will be remembered for more reasons than one. -

The Future of the Air Forces and Air Defence Units of Poland’S Armed Forces
The future of the Air Forces and air defence units of Poland’s Armed Forces ISBN 978-83-61663-05-8 The future of the Air Forces and air defence units of Poland’s Armed Forces Pulaski for Defence of Poland Warsaw 2016 Authors: Rafał Ciastoń, Col. (Ret.) Jerzy Gruszczyński, Rafał Lipka, Col. (Ret.) dr hab. Adam Radomyski, Tomasz Smura Edition: Tomasz Smura, Rafał Lipka Consultations: Col. (Ret.) Krystian Zięć Proofreading: Reuben F. Johnson Desktop Publishing: Kamil Wiśniewski The future of the Air Forces and air defence units of Poland’s Armed Forces Copyright © Casimir Pulaski Foundation ISBN 978-83-61663-05-8 Publisher: Casimir Pulaski Foundation ul. Oleandrów 6, 00-629 Warsaw, Poland www.pulaski.pl Table of content Introduction 7 Chapter I 8 1. Security Environment of the Republic of Poland 8 Challenges faced by the Air Defence 2. Threat scenarios and missions 13 System of Poland’s Armed Forces of Air Force and Air Defense Rafał Ciastoń, Rafał Lipka, 2.1 An Armed attack on the territory of Poland and 13 Col. (Ret.) dr hab. Adam Radomyski, Tomasz Smura collective defense measures within the Article 5 context 2.2 Low-intensity conflict, including actions 26 below the threshold of war 2.3 Airspace infringement and the Renegade 30 procedure 2.4 Protection of critical 35 infrastructure and airspace while facing the threat of aviation terrorism 2.5 Out-of-area operations 43 alongside Poland’s allies Chapter II 47 1. Main challenges for the 47 development of air force capabilities in the 21st century What are the development options 2. -

F-5F Tiger II - 1993
F-5F Tiger II - 1993 Taiwan Type: Multirole (Fighter/Attack) Min Speed: 350 kt Max Speed: 920 kt Commissioned: 1993 Length: 14.4 m Wingspan: 8.0 m Height: 4.1 m Crew: 2 Empty Weight: 4392 kg Max Weight: 11214 kg Max Payload: 0 kg Propulsion: 2x J85-GE-21 Sensors / EW: - AN/APQ-153 - (F-5E) Radar, Radar, FCR, Air-to-Air, Short-Range, Max range: 29.6 km - AN/ALR-46(V)3 - (F-5E) ESM, RWR, Radar Warning Receiver, Max range: 222.2 km Weapons / Loadouts: - Mk82 500lb LDGP - (1954) Bomb. Surface Max: 1.9 km. Land Max: 1.9 km. - TC-1 [Tien Chien I] - (1994, Sky Sword I) Guided Weapon. Air Max: 18.5 km. - 275 USG Drop Tank - Drop Tank. - Mk83 1000lb LDGP - (1954) Bomb. Surface Max: 1.9 km. Land Max: 1.9 km. - HYDRA 70mm Rocket - (Mk 66 Rocket, M229 Warhead, M423/7 Fuze) Rocket. Surface Max: 3.7 km. Land Max: 3.7 km. - Mk20 Rockeye II CB [247 x Mk118 Dual Purpose Bomblets] - (1969, Mk7 Dispenser) Bomb. Surface Max: 1.9 km. Land Max: 1.9 km. - AGM-65B Maverick EO - (1976) Guided Weapon. Surface Max: 11.1 km. Land Max: 11.1 km. - AN/AVQ-27 Kit [EO + LRMTS, 12k ft] - (F-5F Only, Son of Zot Box) Sensor Pod. - GBU-12D/B Paveway II LGB [Mk82] - Guided Weapon. Surface Max: 7.4 km. Land Max: 7.4 km. OVERVIEW: The Northrop F-5A/B Freedom Fighter and the F-5E/F Tiger II are part of a family of light supersonic fighter aircraft, first designed by Northrop Corporation in the late 1950s. -
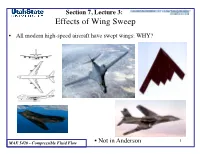
Section 7, Lecture 3: Effects of Wing Sweep
Section 7, Lecture 3: Effects of Wing Sweep • All modern high-speed aircraft have swept wings: WHY? 1 MAE 5420 - Compressible Fluid Flow • Not in Anderson Supersonic Airfoils (revisited) • Normal Shock wave formed off the front of a blunt leading g=1.1 causes significant drag Detached shock waveg=1.3 Localized normal shock wave Credit: Selkirk College Professional Aviation Program 2 MAE 5420 - Compressible Fluid Flow Supersonic Airfoils (revisited, 2) • To eliminate this leading edge drag caused by detached bow wave Supersonic wings are typically quite sharp atg=1.1 the leading edge • Design feature allows oblique wave to attachg=1.3 to the leading edge eliminating the area of high pressure ahead of the wing. • Double wedge or “diamond” Airfoil section Credit: Selkirk College Professional Aviation Program 3 MAE 5420 - Compressible Fluid Flow Wing Design 101 • Subsonic Wing in Subsonic Flow • Subsonic Wing in Supersonic Flow • Supersonic Wing in Subsonic Flow A conundrum! • Supersonic Wing in Supersonic Flow • Wings that work well sub-sonically generally don’t work well supersonically, and vice-versa à Leading edge Wing-sweep can overcome problem with poor performance of sharp leading edge wing in subsonic flight. 4 MAE 5420 - Compressible Fluid Flow Wing Design 101 (2) • Compromise High-Sweep Delta design generates lift at low speeds • Highly-Swept Delta-Wing design … by increasing the angle-of-attack, works “pretty well” in both flow regimes but also has sufficient sweepback and slenderness to perform very Supersonic Subsonic efficiently at high speeds. • On a traditional aircraft wing a trailing vortex is formed only at the wing tips. -

Naca Research Memorandum
RM No. L8A28c NACA RESEARCH MEMORANDUM EFFECTS OF SWEEP ON CONTROLS By John G. Lowry, John A. Axelson, and Harold I. Johnson Langley Memorial Aeronautical La 00 ratory Langley Field, Va. NATIONAL ADVISORY COMMITTEE FOR AERONAUTICS WASHINGTON June 3, 1948 Declassified February 10, 1956 NACA PM No. L8A28c NATIONAL ADVISORY COMMITTEE FOR AERONAUTICS RESEARCH MEMORANDUM EFFECTS OF SWEEP ON CONTROLS By John G. Lowry., John A. Axelson, and Harold I. Johnson SUMMARY An analysis of principal results of recent control-surface research pertinent to transonic flight has -been made. Available experimental data on control surfaces of both unswept and sweptback configurations at transonic speeds are used to indiäate the control-surface characteristics in the transonic speed range. A design procedure for controls on swept- back wings based on low-speed experimental data is also discussed. The results indicated, that no serious problems resulting from compressibility effects would be encountered as long as the speeds are kept below the critical speed of the wing and the trailing-edge angle is kept small. Above critical speed, however, the behavior of the' controls depended to a large extent on the wing sweep angle. The design procedures presented for controls on swept wings, although of a preliminary nature, appear to offer a method of estimating the effec- tiveness of flap-type controls on swept wings of normal aspect ratio and taper ratio. INTRODUCTION The design of controls for unswept wings that fly at low speed has been discussed in several papers (references 1 to 7). The design procedures set forth in these papers are adequate to allow for the prediction of control characteristics within small limits. -

Ac 61-107A - Operations of Aircraft at Altitudes Above 25,000 Feet Msl And/Or Mach Numbers (Mmo) Greater Than .75
AC 61-107A - OPERATIONS OF AIRCRAFT AT ALTITUDES ABOVE 25,000 FEET MSL AND/OR MACH NUMBERS (MMO) GREATER THAN .75 {New-2003-09} Department of Transportation Federal Aviation Administration 1/2/03 Initiated by: AFS-820 1. PURPOSE. This advisory circular (AC) is issued to alert pilots who are transitioning from aircraft with less performance capability to complex, high-performance aircraft that are capable of operating at high altitudes and high airspeeds, of the need to be knowledgeable about the special physiological and aerodynamic considerations involved in these kinds of operations. 2. CANCELLATION. AC 61-107, Operations of Aircraft at Altitudes Above 25,000 Feet MSL and/or Mach Numbers (Mmo) Greater Than .75, dated January 23, 1991, is cancelled. 3. DEFINITIONS. a. Aspect Ratio is the relationship between the wing chord and the wingspan. A short wingspan and wide wing chord equal a low aspect ratio. b. Aileron buzz is a very rapid oscillation of an aileron, at certain critical air speeds of some aircraft, which does not usually reach large magnitudes nor become dangerous. It is often caused by shock- induced separation of the boundary layer. c. Drag Divergence is a phenomenon that occurs when an airfoil's drag increases sharply and requires substantial increases in power (thrust) to produce further increases in speed. This is not to be confused with MACH crit. The drag increase is due to the unstable formation of shock waves that transform a large amount of energy into heat and into pressure pulses that act to consume a major portion of the available propulsive energy.