Time, Delays, and Deferred Work
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Washington, Wednesday, January 25, 1950
VOLUME 15 ■ NUMBER 16 Washington, Wednesday, January 25, 1950 TITLE 3— THE PRESIDENT in paragraph (a) last above, to the in CONTENTS vention is insufficient equitably to justify EXECUTIVE ORDER 10096 a requirement of assignment to the Gov THE PRESIDENT ernment of the entire right, title and P roviding for a U niform P atent P olicy Executive Order Pase for the G overnment W ith R espect to interest to such invention, or in any case where the Government has insufficient Inventions made by Government I nventions M ade by G overnment interest in an invention to obtain entire employees; providing, for uni E mployees and for the Administra form patent policy for Govern tion of Such P olicy right, title and interest therein (although the Government could obtain some under ment and for administration of WHEREAS inventive advances in paragraph (a), above), the Government such policy________________ 389 scientific and technological fields fre agency concerned, subject to the ap quently result from governmental ac proval of the Chairman of the Govern EXECUTIVE AGENCIES tivities carried on by Government ment Patents Board (provided for in Agriculture Department employees; and paragraph 3 of this order and herein See Commodity Credit Corpora WHEREAS the Government of the after referred to as the Chairman), shall tion ; Forest Service; Production United States is expending large sums leave title to such invention in the and Marketing Administration. of money annually for the conduct of employee, subject, however, to the reser these activities; -

HOW FAST IS RF? by RON HRANAC
Originally appeared in the September 2008 issue of Communications Technology. HOW FAST IS RF? By RON HRANAC Maybe a better question is, "What's the speed of an electromagnetic signal in a vacuum?" After all, what we call RF refers to signals in the lower frequency or longer wavelength part of the electromagnetic spectrum. Light is an electromagnetic signal, too, existing in the higher frequency or shorter wavelength part of the electromagnetic spectrum. One way to look at it is to assume that RF is nothing more than really, really low frequency light, or that light is really, really high frequency RF. As you might imagine, the numbers involved in describing RF and light can be very large or very small. For more on this, see my June 2007 CT column, "Big Numbers, Small Numbers" (www.cable360.net/ct/operations/techtalk/23783.html). According to the National Institute of Standards and Technology, the speed of light in a vacuum, c0, is 299,792,458 meters per second (http://physics.nist.gov/cgi-bin/cuu/Value?c). The designation c0 is one that NIST uses to reference the speed of light in a vacuum, while c is occasionally used to reference the speed of light in some other medium. Most of the time the subscript zero is dropped, with c being a generic designation for the speed of light. Let's put c0 in terms that may be more familiar. You probably recall from junior high or high school science class that the speed of light is 186,000 miles per second. -

Philip Gibbs EVENT-SYMMETRIC SPACE-TIME
Event-Symmetric Space-Time “The universe is made of stories, not of atoms.” Muriel Rukeyser Philip Gibbs EVENT-SYMMETRIC SPACE-TIME WEBURBIA PUBLICATION Cyberspace First published in 1998 by Weburbia Press 27 Stanley Mead Bradley Stoke Bristol BS32 0EF [email protected] http://www.weburbia.com/press/ This address is supplied for legal reasons only. Please do not send book proposals as Weburbia does not have facilities for large scale publication. © 1998 Philip Gibbs [email protected] A catalogue record for this book is available from the British Library. Distributed by Weburbia Tel 01454 617659 Electronic copies of this book are available on the world wide web at http://www.weburbia.com/press/esst.htm Philip Gibbs’s right to be identified as the author of this work has been asserted by him in accordance with the Copyright, Designs and Patents Act 1988. All rights reserved, except that permission is given that this booklet may be reproduced by photocopy or electronic duplication by individuals for personal use only, or by libraries and educational establishments for non-profit purposes only. Mass distribution of copies in any form is prohibited except with the written permission of the author. Printed copies are printed and bound in Great Britain by Weburbia. Dedicated to Alice Contents THE STORYTELLER ................................................................................... 11 Between a story and the world ............................................................. 11 Dreams of Rationalism ....................................................................... -

United States District Court Southern District Of
Case 3:11-cv-01812-JM-JMA Document 31 Filed 02/20/13 Page 1 of 10 1 2 3 4 5 6 7 8 9 UNITED STATES DISTRICT COURT 10 SOUTHERN DISTRICT OF CALIFORNIA 11 12 In re JIFFY LUBE ) Case No.: 3:11-MD-2261-JM (JMA) INTERNATIONAL, INC. TEXT ) 13 SPAM LITIGATION ) FINAL APPROVAL OF CLASS ) ACTION AND ORDER OF 14 ) DISMISSAL WITH PREJUDICE ) 15 16 Pending before the Court are Plaintiffs’ Motion for Final Approval of Class 17 Action Settlement (Dkt. 90) and Plaintiffs’ Motion for Approval of Attorneys’ Fees and 18 Expenses and Class Representative Incentive Awards (Dkt. 86) (collectively, the 19 “Motions”). The Court, having reviewed the papers filed in support of the Motions, 20 having heard argument of counsel, and finding good cause appearing therein, hereby 21 GRANTS Plaintiffs’ Motions and it is hereby ORDERED, ADJUDGED, and DECREED 22 THAT: 23 1. Terms and phrases in this Order shall have the same meaning as ascribed to 24 them in the Parties’ August 1, 2012 Class Action Settlement Agreement, as amended by 25 the First Amendment to Class Action Settlement Agreement as of September 28, 2012 26 (the “Settlement Agreement”). 27 2. This Court has jurisdiction over the subject matter of this action and over all 28 Parties to the Action, including all Settlement Class Members. 1 3:11-md-2261-JM (JMA) Case 3:11-cv-01812-JM-JMA Document 31 Filed 02/20/13 Page 2 of 10 1 3. On October 10, 2012, this Court granted Preliminary Approval of the 2 Settlement Agreement and preliminarily certified a settlement class consisting of: 3 4 All persons or entities in the United States and its Territories who in April 2011 were sent a text message from short codes 5 72345 or 41411 promoting Jiffy Lube containing language similar to the following: 6 7 JIFFY LUBE CUSTOMERS 1 TIME OFFER: REPLY Y TO JOIN OUR ECLUB FOR 45% OFF 8 A SIGNATURE SERVICE OIL CHANGE! STOP TO 9 UNSUB MSG&DATA RATES MAY APPLY T&C: JIFFYTOS.COM. -
Low Latency – How Low Can You Go?
WHITE PAPER Low Latency – How Low Can You Go? Low latency has always been an important consideration in telecom networks for voice, video, and data, but recent changes in applications within many industry sectors have brought low latency right to the forefront of the industry. The finance industry and algorithmic trading in particular, or algo-trading as it is known, is a commonly quoted example. Here latency is critical, and to quote Information Week magazine, “A 1-millisecond advantage in trading applications can be worth $100 million a year to a major brokerage firm.” This drives a huge focus on all aspects of latency, including the communications systems between the brokerage firm and the exchange. However, while the finance industry is spending a lot of money on low- latency services between key locations such as New York and Chicago or London and Frankfurt, this is actually only a small part of the wider telecom industry. Many other industries are also now driving lower and lower latency in their networks, such as for cloud computing and video services. Also, as mobile operators start to roll out 5G services, latency in the xHaul mobile transport network, especially the demanding fronthaul domain, becomes more and more important in order to reach the stringent 5G requirements required for the new class of ultra-reliable low-latency services. This white paper will address the drivers behind the recent rush to low- latency solutions and networks and will consider how network operators can remove as much latency as possible from their networks as they also race to zero latency. -

Timestamp Precision
Timestamp Precision Kevin Bross 15 April 2016 15 April 2016 IEEE 1904 Access Networks Working Group, San Jose, CA USA 1 Timestamp Packets The orderInfo field can be used as a 32-bit timestamp, down to ¼ ns granularity: 1 s 30 bits of nanoseconds 2 ¼ ms µs ns ns Two main uses of timestamp: – Indicating start or end time of flow – Indicating presentation time of packets for flows with non-constant data rates s = second ms = millisecond µs = microsecond ns = nanosecond 15 April 2016 IEEE 1904 Access Networks Working Group, San Jose, CA USA 2 Presentation Time To reduce bandwidth during idle periods, some protocols will have variable rates – Fronthaul may be variable, even if rate to radio unit itself is a constant rate Presentation times allows RoE to handle variable data rates – Data may experience jitter in network – Egress buffer compensates for network jitter – Presentation time is when the data is to exit the RoE node • Jitter cleaners ensure data comes out cleanly, and on the right bit period 15 April 2016 IEEE 1904 Access Networks Working Group, San Jose, CA USA 3 Jitter vs. Synchronization Synchronization requirements for LTE are only down to ~±65 ns accuracy – Each RoE node may be off from TAI by up to 65 ns (or more in some circumstances) – Starting and ending a stream may be off by this amount …but jitter from packet to packet must be much tighter – RoE nodes should be able to output data at precise relative times if timestamp is used for a given packet – Relative bit time within a flow is important 15 April 2016 IEEE 1904 Access -

What Happened Before the Big Bang?
Quarks and the Cosmos ICHEP Public Lecture II Seoul, Korea 10 July 2018 Michael S. Turner Kavli Institute for Cosmological Physics University of Chicago 100 years of General Relativity 90 years of Big Bang 50 years of Hot Big Bang 40 years of Quarks & Cosmos deep connections between the very big & the very small 100 years of QM & atoms 50 years of the “Standard Model” The Universe is very big (billions and billions of everything) and often beyond the reach of our minds and instruments Big ideas and powerful instruments have enabled revolutionary progress a very big idea connections between quarks & the cosmos big telescopes on the ground Hawaii Chile and in space: Hubble, Spitzer, Chandra, and Fermi at the South Pole basics of our Universe • 100 billion galaxies • each lit with the light of 100 billion stars • carried away from each other by expanding space from a • big bang beginning 14 billion yrs ago Hubble (1925): nebulae are “island Universes” Universe comprised of billions of galaxies Hubble Deep Field: one ten millionth of the sky, 10,000 galaxies 100 billion galaxies in the observable Universe Universe is expanding and had a beginning … Hubble, 1929 Signature of big bang beginning Einstein: Big Bang = explosion of space with galaxies carried along The big questions circa 1978 just two numbers: H0 and q0 Allan Sandage, Hubble’s “student” H0: expansion rate (slope age) q0: deceleration (“droopiness” destiny) … tens of astronomers working (alone) to figure it all out Microwave echo of the big bang Hot MichaelBig S Turner Bang -

15 Pecision System Clock Architecture
Pecision System Clock Architecture 15 Pecision System Clock Architecture “Time iz like money, the less we hav ov it teu spare the further we make it go.” Josh Billing Encyclopedia and Proverbial Philosophy of Wit and Humor, 1874 225 Pecision System Clock Architecture Limitations of the Art Over the almost three decades that NTP has evolved, accuracy expectations have improved from 100 ms to less than 1 ms on fast LANs with multiple segments interconnected by switches and less than a few milliseconds on most campus and corporate networks with multiple subnets interconnected by routers. Today the practical expectations with a GPS receiver, PPS signal and precision kernel support are a few microseconds. In principle the ultimate expectations are limited only by the 232-ps resolution of the NTP timestamp format or about the time light travels three inches. Improving accuracy expectations below the PPS regime is proving intricate and tricky. In this chapter we turn to the most ambitious means available to minimize errors in the face of hardware and software not designed for extraordinary timekeeping. First we examine the hardware and software components for a precision system clock and evolve an optimal design. Next we survey timestamping techniques using both hardware, driver and software methods to minimize errors due to media, device and operating system latencies. Finally, we explore the IEEE 1588 Precision Time Protocol (PTP), how it is used in a high speed LAN, and how it and NTP can sail in the same boat. The parting shots section proposes a hardware assisted design which provides performance equivalent to PTP with only minimal modifications to the Unix operating system kernel. -
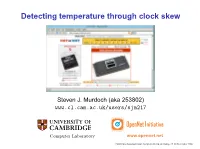
Detecting Temperature Through Clock Skew
Detecting temperature through clock skew Steven J. Murdoch (aka 253802) www.cl.cam.ac.uk/users/sjm217 OpenNet Initiative Computer Laboratory www.opennet.net 23rd Chaos Communication Congress, Berlin, Germany, 27–30 December 2006 This presentation introduces clock skew and how it can introduce security vulnerabilities 0.0 De−noised ●● 26.4 ● ● ● ● 26.3 −0.5 Non−linear offset ● ● ●●Temperature C) ° ● ● ●●● 26.2 −1.0 ●● ●●● ● ●●●●●●●● 26.1 ●●●●●●● ●●●● ● ●● ●●●● −1.5 ●● ● ●● ● ●● ●● 26.0 Temperature ( ● Clock skew, its link to temperature, and measurement ●●● ●●●●●●●●● ● ●●●●● 25.9 Non−linear offset component (ms) ●●●●●●●●●●●●●●●● −−2.0 Variable skew ● 25.8 Fri 11:00 Fri 21:00 Sat 07:00 Sat 17:00 Time Service Publication Connection Setup Data Transfer Hidden Service 1 6 * RP 7 Introduction Point (IP) IP Rendevous 2 Point (RP) Tor and hidden services 5 RP 8 Directory data Server 4 IP Client 3 Measurer Attacking Tor with clock skew Attacker Tor Network Hidden Server Other applications of clock skew Computers have multiple clocks which are constructed from hardware and software components A clock consists of an: • Oscillator, controlled by a crystal, ticks at an nominal frequency • Counter, counts the number of ticks produce by the oscillator On Linux there are several clocks available (other OS are similar): • Jiffy counter: An uncorrected clock used internally to the OS • System clock: A clock corrected by NTP (used by applications) • BIOS clock (also known as CMOS clock): runs even when PC is off and initialises the system clock Computers -

Discovery of Frequency-Sweeping Millisecond Solar Radio Bursts Near 1400 Mhz with a Small Interferometer Physics Department Senior Honors Thesis 2006 Eric R
Discovery of frequency-sweeping millisecond solar radio bursts near 1400 MHz with a small interferometer Physics Department Senior Honors Thesis 2006 Eric R. Evarts Brandeis University Abstract While testing the Small Radio Telescope Interferometer at Haystack Observatory, we noticed occasional strong fringes on the Sun. Upon closer study of this activity, I find that each significant burst corresponds to an X-ray solar flare and corresponds to data observed by RSTN. At very short integrations (512 µs), most bursts disappear in the noise, but a few still show very strong fringes. Studying these <25 events at 512 µs integration reveals 2 types of burst: one with frequency structure and one without. Bursts with frequency structure have a brightness temperature ~1013K, while bursts without frequency structure have a brightness temperature ~108K. These bursts are studied at higher frequency resolution than any previous solar study revealing a very distinct structure that is not currently understood. 1 Table of Contents Abstract ..........................................................................................................................1 Table of Contents...........................................................................................................3 Introduction ...................................................................................................................5 Interferometry Crash Course ........................................................................................5 The Small Radio Telescope -

Microsecond and Millisecond Dynamics in the Photosynthetic
Microsecond and millisecond dynamics in the photosynthetic protein LHCSR1 observed by single-molecule correlation spectroscopy Toru Kondoa,1,2, Jesse B. Gordona, Alberta Pinnolab,c, Luca Dall’Ostob, Roberto Bassib, and Gabriela S. Schlau-Cohena,1 aDepartment of Chemistry, Massachusetts Institute of Technology, Cambridge, MA 02139; bDepartment of Biotechnology, University of Verona, 37134 Verona, Italy; and cDepartment of Biology and Biotechnology, University of Pavia, 27100 Pavia, Italy Edited by Catherine J. Murphy, University of Illinois at Urbana–Champaign, Urbana, IL, and approved April 11, 2019 (received for review December 13, 2018) Biological systems are subjected to continuous environmental (5–9) or intensity correlation function analysis (10). CPF analysis fluctuations, and therefore, flexibility in the structure and func- bins the photon data, obscuring fast dynamics. In contrast, inten- tion of their protein building blocks is essential for survival. sity correlation function analysis characterizes fluctuations in the Protein dynamics are often local conformational changes, which photon arrival rate, accessing dynamics down to microseconds. allows multiple dynamical processes to occur simultaneously and However, the fluorescence lifetime is a powerful indicator of rapidly in individual proteins. Experiments often average over conformation for chromoproteins and for lifetime-based FRET these dynamics and their multiplicity, preventing identification measurements, yet it is ignored in intensity-based analyses. of the molecular origin and impact on biological function. Green 2D fluorescence lifetime correlation (2D-FLC) analysis was plants survive under high light by quenching excess energy, recently introduced as a method to both resolve fast dynam- and Light-Harvesting Complex Stress Related 1 (LHCSR1) is the ics and use fluorescence lifetime information (11, 12). -

Challenges Using Linux As a Real-Time Operating System
https://ntrs.nasa.gov/search.jsp?R=20200002390 2020-05-24T04:26:54+00:00Z View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by NASA Technical Reports Server Challenges Using Linux as a Real-Time Operating System Michael M. Madden* NASA Langley Research Center, Hampton, VA, 23681 Human-in-the-loop (HITL) simulation groups at NASA and the Air Force Research Lab have been using Linux as a real-time operating system (RTOS) for over a decade. More recently, SpaceX has revealed that it is using Linux as an RTOS for its Falcon launch vehicles and Dragon capsules. As Linux makes its way from ground facilities to flight critical systems, it is necessary to recognize that the real-time capabilities in Linux are cobbled onto a kernel architecture designed for general purpose computing. The Linux kernel contain numerous design decisions that favor throughput over determinism and latency. These decisions often require workarounds in the application or customization of the kernel to restore a high probability that Linux will achieve deadlines. I. Introduction he human-in-the-loop (HITL) simulation groups at the NASA Langley Research Center and the Air Force TResearch Lab have used Linux as a real-time operating system (RTOS) for over a decade [1, 2]. More recently, SpaceX has revealed that it is using Linux as an RTOS for its Falcon launch vehicles and Dragon capsules [3]. Reference 2 examined an early version of the Linux Kernel for real-time applications and, using black box testing of jitter, found it suitable when paired with an external hardware interval timer.