Understand the Real World of Mixing
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Glossary Physics (I-Introduction)
1 Glossary Physics (I-introduction) - Efficiency: The percent of the work put into a machine that is converted into useful work output; = work done / energy used [-]. = eta In machines: The work output of any machine cannot exceed the work input (<=100%); in an ideal machine, where no energy is transformed into heat: work(input) = work(output), =100%. Energy: The property of a system that enables it to do work. Conservation o. E.: Energy cannot be created or destroyed; it may be transformed from one form into another, but the total amount of energy never changes. Equilibrium: The state of an object when not acted upon by a net force or net torque; an object in equilibrium may be at rest or moving at uniform velocity - not accelerating. Mechanical E.: The state of an object or system of objects for which any impressed forces cancels to zero and no acceleration occurs. Dynamic E.: Object is moving without experiencing acceleration. Static E.: Object is at rest.F Force: The influence that can cause an object to be accelerated or retarded; is always in the direction of the net force, hence a vector quantity; the four elementary forces are: Electromagnetic F.: Is an attraction or repulsion G, gravit. const.6.672E-11[Nm2/kg2] between electric charges: d, distance [m] 2 2 2 2 F = 1/(40) (q1q2/d ) [(CC/m )(Nm /C )] = [N] m,M, mass [kg] Gravitational F.: Is a mutual attraction between all masses: q, charge [As] [C] 2 2 2 2 F = GmM/d [Nm /kg kg 1/m ] = [N] 0, dielectric constant Strong F.: (nuclear force) Acts within the nuclei of atoms: 8.854E-12 [C2/Nm2] [F/m] 2 2 2 2 2 F = 1/(40) (e /d ) [(CC/m )(Nm /C )] = [N] , 3.14 [-] Weak F.: Manifests itself in special reactions among elementary e, 1.60210 E-19 [As] [C] particles, such as the reaction that occur in radioactive decay. -

1 Fluid Flow Outline Fundamentals of Rheology
Fluid Flow Outline • Fundamentals and applications of rheology • Shear stress and shear rate • Viscosity and types of viscometers • Rheological classification of fluids • Apparent viscosity • Effect of temperature on viscosity • Reynolds number and types of flow • Flow in a pipe • Volumetric and mass flow rate • Friction factor (in straight pipe), friction coefficient (for fittings, expansion, contraction), pressure drop, energy loss • Pumping requirements (overcoming friction, potential energy, kinetic energy, pressure energy differences) 2 Fundamentals of Rheology • Rheology is the science of deformation and flow – The forces involved could be tensile, compressive, shear or bulk (uniform external pressure) • Food rheology is the material science of food – This can involve fluid or semi-solid foods • A rheometer is used to determine rheological properties (how a material flows under different conditions) – Viscometers are a sub-set of rheometers 3 1 Applications of Rheology • Process engineering calculations – Pumping requirements, extrusion, mixing, heat transfer, homogenization, spray coating • Determination of ingredient functionality – Consistency, stickiness etc. • Quality control of ingredients or final product – By measurement of viscosity, compressive strength etc. • Determination of shelf life – By determining changes in texture • Correlations to sensory tests – Mouthfeel 4 Stress and Strain • Stress: Force per unit area (Units: N/m2 or Pa) • Strain: (Change in dimension)/(Original dimension) (Units: None) • Strain rate: Rate -

Introduction to the CFD Module
INTRODUCTION TO CFD Module Introduction to the CFD Module © 1998–2018 COMSOL Protected by patents listed on www.comsol.com/patents, and U.S. Patents 7,519,518; 7,596,474; 7,623,991; 8,457,932; 8,954,302; 9,098,106; 9,146,652; 9,323,503; 9,372,673; and 9,454,625. Patents pending. This Documentation and the Programs described herein are furnished under the COMSOL Software License Agreement (www.comsol.com/comsol-license-agreement) and may be used or copied only under the terms of the license agreement. COMSOL, the COMSOL logo, COMSOL Multiphysics, COMSOL Desktop, COMSOL Server, and LiveLink are either registered trademarks or trademarks of COMSOL AB. All other trademarks are the property of their respective owners, and COMSOL AB and its subsidiaries and products are not affiliated with, endorsed by, sponsored by, or supported by those trademark owners. For a list of such trademark owners, see www.comsol.com/trademarks. Version: COMSOL 5.4 Contact Information Visit the Contact COMSOL page at www.comsol.com/contact to submit general inquiries, contact Technical Support, or search for an address and phone number. You can also visit the Worldwide Sales Offices page at www.comsol.com/contact/offices for address and contact information. If you need to contact Support, an online request form is located at the COMSOL Access page at www.comsol.com/support/case. Other useful links include: • Support Center: www.comsol.com/support • Product Download: www.comsol.com/product-download • Product Updates: www.comsol.com/support/updates •COMSOL Blog: www.comsol.com/blogs • Discussion Forum: www.comsol.com/community •Events: www.comsol.com/events • COMSOL Video Gallery: www.comsol.com/video • Support Knowledge Base: www.comsol.com/support/knowledgebase Part number: CM021302 Contents Introduction . -

Hydraulics Manual Glossary G - 3
Glossary G - 1 GLOSSARY OF HIGHWAY-RELATED DRAINAGE TERMS (Reprinted from the 1999 edition of the American Association of State Highway and Transportation Officials Model Drainage Manual) G.1 Introduction This Glossary is divided into three parts: · Introduction, · Glossary, and · References. It is not intended that all the terms in this Glossary be rigorously accurate or complete. Realistically, this is impossible. Depending on the circumstance, a particular term may have several meanings; this can never change. The primary purpose of this Glossary is to define the terms found in the Highway Drainage Guidelines and Model Drainage Manual in a manner that makes them easier to interpret and understand. A lesser purpose is to provide a compendium of terms that will be useful for both the novice as well as the more experienced hydraulics engineer. This Glossary may also help those who are unfamiliar with highway drainage design to become more understanding and appreciative of this complex science as well as facilitate communication between the highway hydraulics engineer and others. Where readily available, the source of a definition has been referenced. For clarity or format purposes, cited definitions may have some additional verbiage contained in double brackets [ ]. Conversely, three “dots” (...) are used to indicate where some parts of a cited definition were eliminated. Also, as might be expected, different sources were found to use different hyphenation and terminology practices for the same words. Insignificant changes in this regard were made to some cited references and elsewhere to gain uniformity for the terms contained in this Glossary: as an example, “groundwater” vice “ground-water” or “ground water,” and “cross section area” vice “cross-sectional area.” Cited definitions were taken primarily from two sources: W.B. -
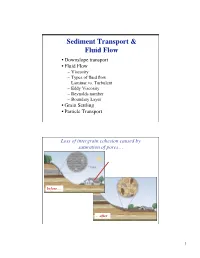
Sediment Transport & Fluid Flow
Sediment Transport & Fluid Flow • Downslope transport • Fluid Flow – Viscosity – Types of fluid flow – Laminar vs. Turbulent – Eddy Viscosity – Reynolds number – Boundary Layer • Grain Settling • Particle Transport Loss of intergrain cohesion caused by saturation of pores… before… …after 1 Different kinds of mass movements, variable velocity (and other factors) From weathering to deposition: sorting and modification of clastic particles 2 Effects of transport on rounding, sorting How are particles transported by fluids? What are the key parameters? 3 Flow regimes in a stream Fluid Flow • Fundamental Physical Properties of Fluids – Density (ρ) – Viscosity (µ) Control the ability of a fluid to erode & transport particles • Viscosity - resistance to flow, or deform under shear stress. – Air - low – Water - low – Ice- high ∆µ with ∆ T, or by mixing other materials 4 Shear Deformation Shear stress (τ) is the shearing force per unit area • generated at the boundary between two moving fluids • function of the extent to which the slower moving fluid retards motion of the faster moving fluid (i.e., viscosity) Fluid Viscosity and Flow • Dynamic viscosity(µ) - the resistance of a substance (water) to ∆ shape during flow (shear stress) ! µ = du/dy where, dy τ = shear stress (dynes/cm2) du/dy = velocity gradient (rate of deformation) • Kinematic viscosity(v) =µ/ρ 5 Behaviour of Fluids Viscous Increased fluidity Types of Fluids Water - flow properties function of sediment concentrations • Newtonian Fluids - no strength, no ∆ in viscosity as shear rate ∆’s (e.g., -

Introduction
VERIFYING CONSISTENCY OF EFFECTIVE-VISCOSITY AND PRESSURE- LOSS DATA FOR DESIGNING FOAM PROPORTIONING SYSTEMS Bogdan Z. Dlugogorski1, Ted H. Schaefer1,2 and Eric M. Kennedy1 1Process Safety and Environment Protection Research Group School of Engineering The University of Newcastle Callaghan, NSW 2308, AUSTRALIA Phone: +61 2 4921 6176, Fax: +61 2 4921 6920 Email: [email protected] 23M Specialty Materials Laboratory Dunheved Circuit, St Marys, NSW 2760, AUSTRALIA ABSTRACT Aspirating and compressed-air foam systems often incorporate proportioners designed to draw sufficient rate of foam concentrate into the flowing stream of water. The selection of proportioner’s piping follows from the engineering correlations linking the pressure loss with the flow rate of a concentrate, for specified temperature (usually 20 oC) and pipe size. Unfortunately, reports exist that such correlations may be inaccurate, resulting in the design of underperforming suppression systems. To illustrate the problem, we introduce two correlations, sourced from industry and developed for the same foam concentrate, that describe effective viscosity (μeff) and pressure loss as functions of flow rate and pipe diameter. We then present a methodology to verify the internal consistency of each data set. This methodology includes replotting the curves of the effective viscosity vs the nominal shear rate at the wall (32Q/(πD3)) and also replotting the pressure loss in terms of the stress rate at the wall (τw) vs the nominal shear rate at the wall. In the laminar regime, for time-independent fluids with no slip at the wall (which is the behaviour displayed by foam concentrates), consistent data sets are 3 3 characterised by a single curve of μeff vs 32Q/(πD ), and a single curve of τw vs 32Q/(πD ) in the laminar regime. -
CALCULUS for the UTTERLY CONFUSED Has Proven to Be a Wonderful Review Enabling Me to Move Forward in Application of Calculus and Advanced Topics in Mathematics
TLFeBOOK WHAT READERS ARE SAYIN6 "I wish I had had this book when I needed it most, which was during my pre-med classes. It could have also been a great tool for me in a few medical school courses." Or. Kellie Aosley8 Recent Hedical school &a&ate "CALCULUS FOR THE UTTERLY CONFUSED has proven to be a wonderful review enabling me to move forward in application of calculus and advanced topics in mathematics. I found it easy to use and great as a reference for those darker aspects of calculus. I' Aaron Ladeville, Ekyiheeriky Student 'I1 am so thankful for CALCULUS FOR THE UTTERLY CONFUSED! I started out Clueless but ended with an All' Erika Dickstein8 0usihess school Student "As a non-traditional student one thing I have learned is the importance of material supplementary to texts. Especially in calculus it helps to have a second source, especially one as lucid and fun to read as CALCULUS FOR THE UTTERtY CONFUSED. Anyone, whether you are a math weenie or not, will get something out of this book. With this book, your chances of survival in the calculus jungle are greatly increased.'I Brad &3~ker,Physics Student Other books in the Utterly Conhrsed Series include: Financial Planning for the Utterly Confrcsed, Fifth Edition Job Hunting for the Utterly Confrcred Physics for the Utterly Confrred CALCULUS FOR THE UTTERLY CONFUSED Robert M. Oman Daniel M. Oman McGraw -Hill New York San Francisco Washington, D.C. Auckland Bogoth Caracas Lisbon London Madrid Mexico City Milan Montreal New Delhi San Juan Singapore Sydney Tokyo Toronto Library of Congress Cataloging-in-Publication Data Oman, Robert M. -

Impeller Power Draw Across the Full Reynolds Number
IMPELLER POWER DRAW ACROSS THE FULL REYNOLDS NUMBER SPECTRUM Thesis Submitted to The School of Engineering of the UNIVERSITY OF DAYTON In Partial Fulfillment of the Requirements for The Degree of Master of Science in Chemical Engineering By Zheng Ma Dayton, OH August, 2014 IMPELLER POWER DRAW ACROSS THE FULL REYNOLDS NUMBER SPECTRUM Name: Ma, Zheng APPROVED BY: ______________________ ________________________ Kevin J. Myers, D.Sc., P.E. Eric E. Janz, P.E. Advisory Committee Chairman Research Advisor Research Advisor & Professor Chemineer Research & Chemical & Materials Engineering Development Manager NOV-Process & Flow Technologies ________________________ Robert J. Wilkens, Ph.D., P.E. Committee Member & Professor Chemical & Materials Engineering _______________________ ___________________________ John G. Weber, Ph.D. Eddy M. Rojas, Ph.D., M.A., P.E. Associate Dean Dean, School of Engineering School of Engineering ii ABSTRACT IMPELLER POWER DRAW ACROSS THE FULL REYNOLDS NUMBER SPECTRUM Name: Ma, Zheng University of Dayton Research Advisors: Dr. Kevin J. Myers Eric E. Janz The objective of this work is to gain information that could be used to design full scale mixing systems, and also could develop a design guide that can provide a reliable prediction of the power draw of different types of impellers. To achieve this goal, the power number behavior,including three operation regimes, the limits of the operation regimes, and the effect of baffling on power number,was compared across the full Reynolds number spectrum for Newtonian fluids in a laboratory-scale agitator. Six industrially significant impellers were tested, including three radial flow impellers: D-6, CD-6, and S-4, and also three axial flow impellers: P-4, SC-3, and HE-3. -

Dimensional Analysis and Modeling
cen72367_ch07.qxd 10/29/04 2:27 PM Page 269 CHAPTER DIMENSIONAL ANALYSIS 7 AND MODELING n this chapter, we first review the concepts of dimensions and units. We then review the fundamental principle of dimensional homogeneity, and OBJECTIVES Ishow how it is applied to equations in order to nondimensionalize them When you finish reading this chapter, you and to identify dimensionless groups. We discuss the concept of similarity should be able to between a model and a prototype. We also describe a powerful tool for engi- I Develop a better understanding neers and scientists called dimensional analysis, in which the combination of dimensions, units, and of dimensional variables, nondimensional variables, and dimensional con- dimensional homogeneity of equations stants into nondimensional parameters reduces the number of necessary I Understand the numerous independent parameters in a problem. We present a step-by-step method for benefits of dimensional analysis obtaining these nondimensional parameters, called the method of repeating I Know how to use the method of variables, which is based solely on the dimensions of the variables and con- repeating variables to identify stants. Finally, we apply this technique to several practical problems to illus- nondimensional parameters trate both its utility and its limitations. I Understand the concept of dynamic similarity and how to apply it to experimental modeling 269 cen72367_ch07.qxd 10/29/04 2:27 PM Page 270 270 FLUID MECHANICS Length 7–1 I DIMENSIONS AND UNITS 3.2 cm A dimension is a measure of a physical quantity (without numerical val- ues), while a unit is a way to assign a number to that dimension. -

Birds and Frogs Equation
Notices of the American Mathematical Society ISSN 0002-9920 ABCD springer.com New and Noteworthy from Springer Quadratic Diophantine Multiscale Principles of Equations Finite Harmonic of the American Mathematical Society T. Andreescu, University of Texas at Element Analysis February 2009 Volume 56, Number 2 Dallas, Richardson, TX, USA; D. Andrica, Methods A. Deitmar, University Cluj-Napoca, Romania Theory and University of This text treats the classical theory of Applications Tübingen, quadratic diophantine equations and Germany; guides readers through the last two Y. Efendiev, Texas S. Echterhoff, decades of computational techniques A & M University, University of and progress in the area. The presenta- College Station, Texas, USA; T. Y. Hou, Münster, Germany California Institute of Technology, tion features two basic methods to This gently-paced book includes a full Pasadena, CA, USA investigate and motivate the study of proof of Pontryagin Duality and the quadratic diophantine equations: the This text on the main concepts and Plancherel Theorem. The authors theories of continued fractions and recent advances in multiscale finite emphasize Banach algebras as the quadratic fields. It also discusses Pell’s element methods is written for a broad cleanest way to get many fundamental Birds and Frogs equation. audience. Each chapter contains a results in harmonic analysis. simple introduction, a description of page 212 2009. Approx. 250 p. 20 illus. (Springer proposed methods, and numerical 2009. Approx. 345 p. (Universitext) Monographs in Mathematics) Softcover examples of those methods. Softcover ISBN 978-0-387-35156-8 ISBN 978-0-387-85468-7 $49.95 approx. $59.95 2009. X, 234 p. (Surveys and Tutorials in The Strong Free Will the Applied Mathematical Sciences) Solving Softcover Theorem Introduction to Siegel the Pell Modular Forms and ISBN: 978-0-387-09495-3 $44.95 Equation page 226 Dirichlet Series Intro- M. -

Tubular Flow with Laminar Flow (CHE 512) M.P. Dudukovic Chemical Reaction Engineering Laboratory (CREL), Washington University, St
Tubular Flow with Laminar Flow (CHE 512) M.P. Dudukovic Chemical Reaction Engineering Laboratory (CREL), Washington University, St. Louis, MO 4. TUBULAR REACTORS WITH LAMINAR FLOW Tubular reactors in which homogeneous reactions are conducted can be empty or packed conduits of various cross-sectional shape. Pipes, i.e tubular vessels of cylindrical shape, dominate. The flow can be turbulent or laminar. The questions arise as to how to interpret the performance of tubular reactors and how to measure their departure from plug flow behavior. We will start by considering a cylindrical pipe with fully developed laminar flow. For a Newtonian fluid the velocity profile is given by r 2 u = 2u 1 (1) R u where u = max is the mean velocity. By making a balance on species A, which may be a 2 reactant or a tracer, we arrive at the following equation: 2C C D C C D A u A + r A r = A (2) z2 z r r r A t For an exercise this equation should be derived by making a balance on an annular cylindrical region of length z , inner radius r and outer radius r. We should render this equation dimensionless by defining: z r t C = ; = ; = ;c = A L R t C Ao where L is the pipe length of interest, R is the pipe radius, t = L/u is the mean residence time, C is some reference concentration. Let us assume an n-th order rate form. Ao The above equation (2) now reads: 2 D c c D L 1 c n1 c 212 + kC t c n = (2a) 2 () A0 u L u R R We define: u L L2 / D characteristic diffusion time() axial Pe = = = (3) a D L / u process time() characteristic convection time = axial Peclet number. -

7. Laminar and Turbulent Flow
CREST Foundation Studies Fundamentals of Fluid Mechanics 7. Laminar and turbulent flow [This material relates predominantly to module ELP035] 7.1 Real fluids 7.2 Examples of Laminar and turbulent flow 7.1 Real Fluids The flow of real fluids exhibits viscous effect, that is they tend to “stick” to solid surfaces and have stresses within their body. You might remember from earlier in the course Newtons law of viscosity: du τ ∝ dy This tells us that the shear stress, τ, in a fluid is proportional to the velocity gradient - the rate of change of velocity across the fluid path. For a “Newtonian” fluid we can write: du τµ= dy where the constant of proportionality, µ, is known as the coefficient of viscosity (or simply viscosity). We saw that for some fluids - sometimes known as exotic fluids - the value of µ changes with stress or velocity gradient. We shall only deal with Newtonian fluids. In this Unit we shall look at how the forces due to momentum changes on the fluid and viscous forces compare and what changes take place. 7.2 Examples of Laminar and turbulent flow If we were to take a pipe of free flowing water and inject a dye into the middle of the stream, what would we expect to happen? Would it be this.... 1 CREST Foundation Studies Fundamentals of Fluid Mechanics this.... or this? Actually all would happen - but for different flow rates. The top occurs when the fluid is flowing fast and the lower when it is flowing slowly. The top situation is known as laminar flow and the lower as turbulent flow.