A Brief History of Automatic Control
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Russian/Soviet 'Iranology' and Russo-Iranian
Oriental Studies and Foreign Policy: Russian/Soviet ‘Iranology’ and Russo-Iranian relations in late Imperial Russia and the early USSR A thesis submitted to the University of Manchester for the Degree of Doctor of Philosophy in the Faculty of Humanities 2014 Denis V. Volkov School of Arts, Languages and Cultures Table of Contents List of Contents.....................................................................................................................2 Alphabetical List of Abbreviations and Acronyms...........................................................5 List of Archives used for research (Russia and Georgia).................................................9 Abstract...............................................................................................................................10 Declaration……………………………………………….……………………………….11 Copyright Statement…………………………………………………………………….11 A Note on Transliteration……………………………………………………………….12 Acknowledgements……………………………………………………………………..13 About the Author………………………………………………………………………14 Introduction........................................................................................................................15 Research context and rationale...................................................................................15 Statement of method...................................................................................................20 Chapter One Theoretical framework: Foucauldian notions and their applicability to the Russian Case………………..……………………………… 26 Introduction………………………..…………….……….………………..………26 -

Control: a Perspective ?
Control: A Perspective ? K. J. Astr¨om˚ aand P. R. Kumar b aDepartment of Automatic Control, Lund University, Lund, Sweden bDepartment of Electrical & Computer Engineering, Texas A&M University, College Station, USA Abstract Feedback is an ancient idea, but feedback control is a young field. Nature long ago discovered feedback since it is essential for homeostasis and life. It was the key for harnessing power in the industrial revolution and is today found everywhere around us. Its development as a field involved contributions from engineers, mathematicians, economists and physicists. It is the first systems discipline; it represented a paradigm shift because it cut across the traditional engineering disciplines of aeronautical, chemical, civil, electrical and mechanical engineering, as well as economics and operations research. The scope of control makes it the quintessential multidisciplinary field. Its complex story of evolution is fascinating, and a perspective on its growth is presented in this paper. The interplay of industry, applications, technology, theory and research is discussed. Key words: Feedback, control, computing, communication, theory, applications. 1 Introduction dividual components like sensors and actuators in large systems. Today control is ubiquitous in our homes, cars Nature discovered feedback long ago. It created mech- and infrastructure. In the modern post-genomic era, a anisms for and exploits feedback at all levels, which is key goal of researchers in systems biology is to under- central to homeostasis and life. As a technology, control stand how to disrupt the feedback of harmful biological dates back at least two millennia. There are many exam- pathways that cause disease. Theory and applications of ples of control from ancient times [460]. -

Harvard Ukrainian Studies PL A
HARVARD UKRAINIAN STUDIES Volume XVI Number 3/4 December 1992 Ukrainian Research Institute Harvard University Cambridge, Massachusetts Publication of this issue has been made possible by the Dr. Eugene Omelsky Publication Fund in Ukrainian Studies, Harvard University. The editors assume no responsibility for statements of fact or opinion made by contributors. Copyright 1994, by the President and Fellows of Harvard College All rights reserved ISSN 0363-5570 Published by the Ukrainian Research Institute of Harvard University, Cambridge, Massachusetts, U.S.A. Printed by BookCrafters, Fredericksburg, Virginia. Articles appearing in this journal are abstracted and indexed in Historical Abstracts and America: History and Life. CONTENTS ARTICLES Fluctuations in Islamic Trade with Eastern Europe during the Viking Age 237 THOMAS S. NOONAN A Hungarian-Galician Marriage at the Beginning of the Fourteenth Century? 261 STANISŁAW SROKA Archbishop Gennadii and the Heresy of the "Judaizers" 269 ANDREI PLIGUZOV The First Old Believers in Ukraine: Observations about Their Social Profile and Behavior 289 GEORG MICHELS Baudouin de Courtenay and the Ukrainian Question 315 ROBERT A. ROTHSTEIN Planning of the Capital in Kharkiv 325 TITUS D. HEWRYK DOCUMENT Stalin's Meeting with a Delegation of Ukrainian Writers on 12 February 1929 361 LEONID MAXIMENKOV ESSAY Ukraine between East and West: Some Reflections on Professor Sevcenko's Essay 433 WŁADYSŁAW A. SERCZYK REVIEW ARTICLE On Teaching the History of Russian 441 HORACE G. LUNT REVIEWS Gerhard Simon, Nationalism and Policy toward the Nationalities in the Soviet Union: From Totalitarian Dictatorship to Post-Stalinist Society (James Critchlow) 449 Roman Szporluk, Communism and Nationalism. Karl Marx Versus Friedrich List (Taras Hryshchenko) 451 Evgenii V. -

Control: a Perspective✩
Automatica 50 (2014) 3–43 Contents lists available at ScienceDirect Automatica journal homepage: www.elsevier.com/locate/automatica Survey Paper Control: A perspectiveI Karl J. Åström a,1, P.R. Kumar b a Department of Automatic Control, Lund University, Lund, Sweden b Department of Electrical & Computer Engineering, Texas A&M University, College Station, USA article info a b s t r a c t Article history: Feedback is an ancient idea, but feedback control is a young field. Nature long ago discovered feedback Received 25 July 2013 since it is essential for homeostasis and life. It was the key for harnessing power in the industrial revolution Received in revised form and is today found everywhere around us. Its development as a field involved contributions from 10 October 2013 engineers, mathematicians, economists and physicists. It is the first systems discipline; it represented a Accepted 17 October 2013 paradigm shift because it cut across the traditional engineering disciplines of aeronautical, chemical, civil, Available online 28 December 2013 electrical and mechanical engineering, as well as economics and operations research. The scope of control makes it the quintessential multidisciplinary field. Its complex story of evolution is fascinating, and a Keywords: Feedback perspective on its growth is presented in this paper. The interplay of industry, applications, technology, Control theory and research is discussed. Computing ' 2013 Elsevier Ltd. All rights reserved. Communication Theory Applications 1. Introduction In the modern post-genomic era, a key goal of researchers in systems biology is to understand how to disrupt the feedback Nature discovered feedback long ago. It created feedback of harmful biological pathways that cause disease. -

Åström, Karl Johan
Projects in History of Automatic Control Johansson, Karl Henrik; Åström, Karl Johan 1997 Document Version: Publisher's PDF, also known as Version of record Link to publication Citation for published version (APA): Johansson, K. H., & Åström, K. J. (Eds.) (1997). Projects in History of Automatic Control. (Technical Reports TFRT-7561). Department of Automatic Control, Lund Institute of Technology (LTH). Total number of authors: 2 General rights Unless other specific re-use rights are stated the following general rights apply: Copyright and moral rights for the publications made accessible in the public portal are retained by the authors and/or other copyright owners and it is a condition of accessing publications that users recognise and abide by the legal requirements associated with these rights. • Users may download and print one copy of any publication from the public portal for the purpose of private study or research. • You may not further distribute the material or use it for any profit-making activity or commercial gain • You may freely distribute the URL identifying the publication in the public portal Read more about Creative commons licenses: https://creativecommons.org/licenses/ Take down policy If you believe that this document breaches copyright please contact us providing details, and we will remove access to the work immediately and investigate your claim. LUND UNIVERSITY PO Box 117 221 00 Lund +46 46-222 00 00 lr ISSN 0280-53L6 rsRN LUTFD2/TFRT- -756 1- -SE '1 Projects in History of Automatic Control Karl Henrik Johansson -
Origin of Stability Analysis: “On Governors” by J.C
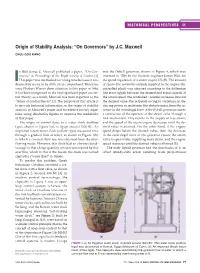
HISTORICAL PERSPECTIVES « Origin of Stability Analysis: “On Governors” by J.C. Maxwell CHUL-GOO Kang n 1868, James C. Maxwell published a paper, “On Gov- was the flyball governor, shown in Figure 4, which was ernors,” in Proceedings of the Royal Society of London [1]. invented in 1788 by the Scottish engineer James Watt for IThis paper was overlooked for a long time because it was the speed regulation of a steam engine [7]–[9]. The amount deemed by many to be difficult to comprehend. However, of steam (the controller output) supplied to the engine (the since Norbert Wiener drew attention to this paper in 1948, controlled plant) was adjusted according to the difference it has been recognized as the first significant paper on con- (the error signal) between the desired and actual speeds. If trol theory; as a result, Maxwell has been regarded as the the actual speed (the controlled variable) increases beyond “father of control theory” [2]. The purpose of this article is the desired value (the setpoint) owing to variations in the to provide historical information on the origin of stability driving power or resistance (the disturbances), then the in- analysis in Maxwell’s paper and to rederive his key equa- crease in the centrifugal force of the flyball governor causes tions using illustrative figures to improve the readability a contraction of the aperture of the steam valve through a of that paper. link mechanism. This results in the supply of less steam, The origin of control dates to a water clock (outflow and the speed of the steam engine decreases until the de- type), shown in Figure 1(a), in Egypt around 1500 BC. -

Pre-Modern Travelers in Central Eurasia Were Numerous, Those Who
Pre-print “Travel and Travelers in Medieval Eurasia” This is an unedited manuscript version of an essay written under a tight deadline for a Historical Atlas of Central Eurasia in 2006. The book is supposed to be published by Cynthia Parzych Publishing. Each essay is to introduce several maps drawn specially for the atlas. Since the maps have not yet been drawn, none are included here; since it is not at all clear that the book will ever see the light of day, I decided it would make sense to post this essay as a “pre-print.” No effort has been made to update it. Daniel Waugh September 2010 The essay is Copyright © 2010 Daniel C. Waugh. Permission to publish it in print or electronic form or distribute it for any for-profit purpose must be obtained in advance from the author. 2 Travel and Travelers in Medieval Eurasia Pre-modern travelers in Central Eurasia were numerous, but few left a record of where they went and what they saw. The purposes of travel—economic, political, or religious— were eminently practical and might not require that the results be documented in the way we expect of modern exploration. Of necessity, our focus here is what we can learn from written accounts which open but a narrow window into the larger world of Eurasian travel. When should we begin our narrative? The archaeological record attests to active exchange across Eurasia going back several millennia. Lacking written materials we can only hypothesize about patterns of exchange possibly involving long-distance travel but more likely a series of linked interactions over shorter distances.