Ray Casting Architectures for Volume Visualization
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Rendering of Feature-Rich Dynamically Changing Volumetric Datasets on GPU
Procedia Computer Science Volume 29, 2014, Pages 648–658 ICCS 2014. 14th International Conference on Computational Science Rendering of Feature-Rich Dynamically Changing Volumetric Datasets on GPU Martin Schreiber, Atanas Atanasov, Philipp Neumann, and Hans-Joachim Bungartz Technische Universit¨at M¨unchen, Munich, Germany [email protected],[email protected],[email protected],[email protected] Abstract Interactive photo-realistic representation of dynamic liquid volumes is a challenging task for today’s GPUs and state-of-the-art visualization algorithms. Methods of the last two decades consider either static volumetric datasets applying several optimizations for volume casting, or dynamic volumetric datasets with rough approximations to realistic rendering. Nevertheless, accurate real-time visualization of dynamic datasets is crucial in areas of scientific visualization as well as areas demanding for accurate rendering of feature-rich datasets. An accurate and thus realistic visualization of such datasets leads to new challenges: due to restrictions given by computational performance, the datasets may be relatively small compared to the screen resolution, and thus each voxel has to be rendered highly oversampled. With our volumetric datasets based on a real-time lattice Boltzmann fluid simulation creating dynamic cavities and small droplets, existing real-time implementations are not applicable for a realistic surface extraction. This work presents a volume tracing algorithm capable of producing multiple refractions which is also robust to small droplets and cavities. Furthermore we show advantages of our volume tracing algorithm compared to other implementations. Keywords: 1 Introduction The photo-realistic real-time rendering of dynamic liquids, represented by free surface flows and volumetric datasets, has been studied in numerous works [13, 9, 10, 14, 18]. -

Opengl 4.0 Shading Language Cookbook
OpenGL 4.0 Shading Language Cookbook Over 60 highly focused, practical recipes to maximize your use of the OpenGL Shading Language David Wolff BIRMINGHAM - MUMBAI OpenGL 4.0 Shading Language Cookbook Copyright © 2011 Packt Publishing All rights reserved. No part of this book may be reproduced, stored in a retrieval system, or transmitted in any form or by any means, without the prior written permission of the publisher, except in the case of brief quotations embedded in critical articles or reviews. Every effort has been made in the preparation of this book to ensure the accuracy of the information presented. However, the information contained in this book is sold without warranty, either express or implied. Neither the author, nor Packt Publishing, and its dealers and distributors will be held liable for any damages caused or alleged to be caused directly or indirectly by this book. Packt Publishing has endeavored to provide trademark information about all of the companies and products mentioned in this book by the appropriate use of capitals. However, Packt Publishing cannot guarantee the accuracy of this information. First published: July 2011 Production Reference: 1180711 Published by Packt Publishing Ltd. 32 Lincoln Road Olton Birmingham, B27 6PA, UK. ISBN 978-1-849514-76-7 www.packtpub.com Cover Image by Fillipo ([email protected]) Credits Author Project Coordinator David Wolff Srimoyee Ghoshal Reviewers Proofreader Martin Christen Bernadette Watkins Nicolas Delalondre Indexer Markus Pabst Hemangini Bari Brandon Whitley Graphics Acquisition Editor Nilesh Mohite Usha Iyer Valentina J. D’silva Development Editor Production Coordinators Chris Rodrigues Kruthika Bangera Technical Editors Adline Swetha Jesuthas Kavita Iyer Cover Work Azharuddin Sheikh Kruthika Bangera Copy Editor Neha Shetty About the Author David Wolff is an associate professor in the Computer Science and Computer Engineering Department at Pacific Lutheran University (PLU). -
Ray Casting Architectures for Volume Visualization
Ray Casting Architectures for Volume Visualization The Harvard community has made this article openly available. Please share how this access benefits you. Your story matters Citation Ray, Harvey, Hanspeter Pfister, Deborah Silver, and Todd A. Cook. 1999. Ray casting architectures for volume visualization. IEEE Transactions on Visualization and Computer Graphics 5(3): 210-223. Published Version doi:10.1109/2945.795213 Citable link http://nrs.harvard.edu/urn-3:HUL.InstRepos:4138553 Terms of Use This article was downloaded from Harvard University’s DASH repository, and is made available under the terms and conditions applicable to Other Posted Material, as set forth at http:// nrs.harvard.edu/urn-3:HUL.InstRepos:dash.current.terms-of- use#LAA Ray Casting Architectures for Volume Visualization Harvey Ray, Hansp eter P ster , Deb orah Silver , Todd A. Co ok Abstract | Real-time visualization of large volume datasets demands high p erformance computation, pushing the stor- age, pro cessing, and data communication requirements to the limits of current technology. General purp ose paral- lel pro cessors have b een used to visualize mo derate size datasets at interactive frame rates; however, the cost and size of these sup ercomputers inhibits the widespread use for real-time visualization. This pap er surveys several sp e- cial purp ose architectures that seek to render volumes at interactive rates. These sp ecialized visualization accelera- tors have cost, p erformance, and size advantages over par- allel pro cessors. All architectures implement ray casting using parallel and pip elined hardware. Weintro duce a new metric that normalizes p erformance to compare these ar- Fig. -
Phong Shading
Computer Graphics Shading Based on slides by Dianna Xu, Bryn Mawr College Image Synthesis and Shading Perception of 3D Objects • Displays almost always 2 dimensional. • Depth cues needed to restore the third dimension. • Need to portray planar, curved, textured, translucent, etc. surfaces. • Model light and shadow. Depth Cues Eliminate hidden parts (lines or surfaces) Front? “Wire-frame” Back? Convex? “Opaque Object” Concave? Why we need shading • Suppose we build a model of a sphere using many polygons and color it with glColor. We get something like • But we want Shading implies Curvature Shading Motivation • Originated in trying to give polygonal models the appearance of smooth curvature. • Numerous shading models – Quick and dirty – Physics-based – Specific techniques for particular effects – Non-photorealistic techniques (pen and ink, brushes, etching) Shading • Why does the image of a real sphere look like • Light-material interactions cause each point to have a different color or shade • Need to consider – Light sources – Material properties – Location of viewer – Surface orientation Wireframe: Color, no Substance Substance but no Surfaces Why the Surface Normal is Important Scattering • Light strikes A – Some scattered – Some absorbed • Some of scattered light strikes B – Some scattered – Some absorbed • Some of this scattered light strikes A and so on Rendering Equation • The infinite scattering and absorption of light can be described by the rendering equation – Cannot be solved in general – Ray tracing is a special case for -
CS488/688 Glossary
CS488/688 Glossary University of Waterloo Department of Computer Science Computer Graphics Lab August 31, 2017 This glossary defines terms in the context which they will be used throughout CS488/688. 1 A 1.1 affine combination: Let P1 and P2 be two points in an affine space. The point Q = tP1 + (1 − t)P2 with t real is an affine combination of P1 and P2. In general, given n points fPig and n real values fλig such that P P i λi = 1, then R = i λiPi is an affine combination of the Pi. 1.2 affine space: A geometric space composed of points and vectors along with all transformations that preserve affine combinations. 1.3 aliasing: If a signal is sampled at a rate less than twice its highest frequency (in the Fourier transform sense) then aliasing, the mapping of high frequencies to lower frequencies, can occur. This can cause objectionable visual artifacts to appear in the image. 1.4 alpha blending: See compositing. 1.5 ambient reflection: A constant term in the Phong lighting model to account for light which has been scattered so many times that its directionality can not be determined. This is a rather poor approximation to the complex issue of global lighting. 1 1.6CS488/688 antialiasing: Glossary Introduction to Computer Graphics 2 Aliasing artifacts can be alleviated if the signal is filtered before sampling. Antialiasing involves evaluating a possibly weighted integral of the (geometric) image over the area surrounding each pixel. This can be done either numerically (based on multiple point samples) or analytically. -

FAKE PHONG SHADING by Daniel Vlasic Submitted to the Department
FAKE PHONG SHADING by Daniel Vlasic Submitted to the Department of Electrical Engineering and Computer Science in Partial Fulfillment of the Requirements for the Degrees of Bachelor of Science in Computer Science and Engineering and Master of Engineering in Electrical Engineering and Computer Science at the Massachusetts Institute of Technology May 17, 2002 Copyright 2002 M.I.T. All Rights Reserved. Author ________________________________________________________ Department of Electrical Engineering and Computer Science May 17, 2002 Approved by ___________________________________________________ Leonard McMillan Thesis Supervisor Accepted by ____________________________________________________ Arthur C. Smith Chairman, Department Committee on Graduate Theses FAKE PHONG SHADING by Daniel Vlasic Submitted to the Department of Electrical Engineering and Computer Science May 17, 2002 In Partial Fulfillment of the Requirements for the Degrees of Bachelor of Science in Computer Science and Engineering And Master of Engineering in Electrical Engineering and Computer Science ABSTRACT In the real-time 3D graphics pipeline framework, rendering quality greatly depends on illumination and shading models. The highest-quality shading method in this framework is Phong shading. However, due to the computational complexity of Phong shading, current graphics hardware implementations use a simpler Gouraud shading. Today, programmable hardware shaders are becoming available, and, although real-time Phong shading is still not possible, there is no reason not to improve on Gouraud shading. This thesis analyzes four different methods for approximating Phong shading: quadratic shading, environment map, Blinn map, and quadratic Blinn map. Quadratic shading uses quadratic interpolation of color. Environment and Blinn maps use texture mapping. Finally, quadratic Blinn map combines both approaches, and quadratically interpolates texture coordinates. All four methods adequately render higher-resolution methods. -

Ray Tracing Height Fields
Ray Tracing Height Fields £ £ £ Huamin Qu£ Feng Qiu Nan Zhang Arie Kaufman Ming Wan † £ Center for Visual Computing (CVC) and Department of Computer Science State University of New York at Stony Brook, Stony Brook, NY 11794-4400 †The Boeing Company, P.O. Box 3707, M/C 7L-40, Seattle, WA 98124-2207 Abstract bility, make the ray tracing approach a promising alterna- tive for rasterization approach when the size of the terrain We present a novel surface reconstruction algorithm is very large [13]. More importantly, ray tracing provides which can directly reconstruct surfaces with different levels more flexibility than hardware rendering. For example, ray of smoothness in one framework from height fields using 3D tracing allows us to operate directly on the image/Z-buffer discrete grid ray tracing. Our algorithm exploits the 2.5D to render special effects such as terrain with underground nature of the elevation data and the regularity of the rect- bunkers, terrain with shadows, and flythrough with a fish- angular grid from which the height field surface is sampled. eye view. In addition, it is easy to incorporate clouds, haze, Based on this reconstruction method, we also develop a hy- flames, and other amorphous phenomena into the scene by brid rendering method which has the features of both ras- ray tracing. Ray tracing can also be used to fill in holes in terization and ray tracing. This hybrid method is designed image-based rendering. to take advantage of GPUs newly available flexibility and processing power. Most ray tracing height field papers [2, 4, 8, 10] focused on fast ray traversal algorithms and antialiasing methods. -

Interactive Refractive Rendering for Gemstones
Interactive Refractive Rendering for Gemstones LEE Hoi Chi Angie A Thesis Submitted in Partial Fulfillment of the Requirements for the Degree of Master of Philosophy in Automation and Computer-Aided Engineering ©The Chinese University of Hong Kong Jan, 2004 The Chinese University of Hong Kong holds the copyright of this thesis. Any person(s) intending to use a part of whole of the materials in the thesis in a proposed publication must seek copyright release from the Dean of the Graduate School. 统系绍¥圖\& 卿 15 )ij UNIVERSITY —肩j N^Xlibrary SYSTEM/-^ Abstract Customization plays an important role in today's jewelry design industry. There is a demand on the interactive gemstone rendering which is essential for illustrating design layout to the designer and customer interactively. Although traditional rendering techniques can be used for generating photorealistic image, they require long processing time for image generation so that interactivity cannot be attained. The technique proposed in this thesis is to render gemstone interactively using refractive rendering technique. As realism always conflicts with interactivity in the context of rendering, the refractive rendering algorithm need to strike a balance between them. In the proposed technique, the refractive rendering algorithm is performed in two stages, namely the pre-computation stage and the shading stage. In the pre-computation stage, ray-traced information, such as directions and positions of rays, are generated by ray tracing and stored in a database. During the shading stage, the corresponding data are retrieved from the database for the run-time shading calculation of gemstone. In the system, photorealistic image of gemstone with various cutting, properties, lighting and background can be rendered interactively. -
Ray Casting and Rendering
MIT EECS 6.837 Computer Graphics Part 2 – Rendering Today: Intro to Rendering, Ray Casting © NVIDIA Inc. All rights reserved. This content is excluded from our Creative Commons license. For more information, see http://ocw.mit.edu/help/faq-fair-use/. NVIDIA MIT EECS 6.837 – Matusik 1 Cool Artifacts from Assignment 1 © source unknown. All rights reserved. This content is excluded from our Creative Commons license. For more information, see http://ocw.mit.edu/help/faq-fair-use/. 2 Cool Artifacts from Assignment 1 © source unknown. All rights reserved. This content is excluded from our Creative Commons license. For more information, see http://ocw.mit.edu/help/faq-fair-use/. 3 The Story So Far • Modeling – splines, hierarchies, transformations, meshes, etc. • Animation – skinning, ODEs, masses and springs • Now we’ll to see how to generate an image given a scene description! 4 The Remainder of the Term • Ray Casting and Ray Tracing • Intro to Global Illumination – Monte Carlo techniques, photon mapping, etc. • Shading, texture mapping – What makes materials look like they do? • Image-based Rendering • Sampling and antialiasing • Rasterization, z-buffering • Shadow techniques • Graphics Hardware © ACM. All rights reserved. This content is excluded from our Creative Commons [Lehtinen et al. 2008] license. For more information, see http://ocw.mit.edu/help/faq-fair-use/. 5 Today • What does rendering mean? • Basics of ray casting 6 © source unknown. All rights reserved. This content is excluded from our Creative Commons license. For more information, see http://ocw.mit.edu/help/faq-fair-use/. © Oscar Meruvia-Pastor, Daniel Rypl. All rights reserved. -

Flat Shading
Shading Reading: Angel Ch.6 What is “Shading”? So far we have built 3D models with polygons and rendered them so that each polygon has a uniform colour: - results in a ‘flat’ 2D appearance rather than 3D - implicitly assumed that the surface is lit such that to the viewer it appears uniform ‘Shading’ gives the surface its 3D appearance - under natural illumination surfaces give a variation in colour ‘shading’ across the surface - the amount of reflected light varies depends on: • the angle between the surface and the viewer • angle between the illumination source and surface • surface material properties (colour/roughness…) Shading is essential to generate realistic images of 3D scenes Realistic Shading The goal is to render scenes that appear as realistic as photographs of real scenes This requires simulation of the physical processes of image formation - accurate modeling of physics results in highly realistic images - accurate modeling is computationally expensive (not real-time) - to achieve a real-time graphics pipeline performance we must compromise between physical accuracy and computational cost To model shading requires: (1) Model of light source (2) Model of surface reflection Physically accurate modelling of shading requires a global analysis of the scene and illumination to account for surface reflection between surfaces/shadowing/ transparency etc. Fast shading calculation considers only local analysis based on: - material properties/surface geometry/light source position & properties Physics of Image Formation Consider the -
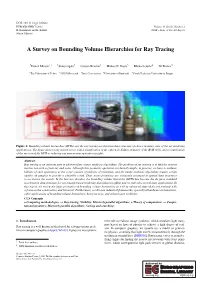
A Survey on Bounding Volume Hierarchies for Ray Tracing
DOI: 10.1111/cgf.142662 EUROGRAPHICS 2021 Volume 40 (2021), Number 2 H. Rushmeier and K. Bühler STAR – State of The Art Report (Guest Editors) A Survey on Bounding Volume Hierarchies for Ray Tracing yDaniel Meister1z yShinji Ogaki2 Carsten Benthin3 Michael J. Doyle3 Michael Guthe4 Jiríˇ Bittner5 1The University of Tokyo 2ZOZO Research 3Intel Corporation 4University of Bayreuth 5Czech Technical University in Prague Figure 1: Bounding volume hierarchies (BVHs) are the ray tracing acceleration data structure of choice in many state of the art rendering applications. The figure shows a ray-traced scene, with a visualization of the otherwise hidden structure of the BVH (left), and a visualization of the success of the BVH in reducing ray intersection operations (right). Abstract Ray tracing is an inherent part of photorealistic image synthesis algorithms. The problem of ray tracing is to find the nearest intersection with a given ray and scene. Although this geometric operation is relatively simple, in practice, we have to evaluate billions of such operations as the scene consists of millions of primitives, and the image synthesis algorithms require a high number of samples to provide a plausible result. Thus, scene primitives are commonly arranged in spatial data structures to accelerate the search. In the last two decades, the bounding volume hierarchy (BVH) has become the de facto standard acceleration data structure for ray tracing-based rendering algorithms in offline and recently also in real-time applications. In this report, we review the basic principles of bounding volume hierarchies as well as advanced state of the art methods with a focus on the construction and traversal. -
Shading and Rendering
Chapter 7 - Shading and Rendering • Local Illumination Models: Shading • Global Illumination: Ray Tracing • Global Illumination: Radiosity • Non-Photorealistic Rendering Literature: H.-J. Bungartz, M. Griebel, C. Zenger: Einführung in die Computergraphik, 2. Auflage, Vieweg 2002 LMU München – Medieninformatik – Andreas Butz – Computergrafik 1 – SS2015 – Kapitel 7 1 ! The 3D rendering pipeline (our version for this class) 3D models in 3D models in world 2D Polygons in Pixels in image model coordinates coordinates camera coordinates coordinates Scene graph Camera Rasterization Animation, Lights Interaction LMU München – Medieninformatik – Andreas Butz – Computergrafik 1 – SS2015 – Kapitel 7 2 ! Local Illumination: Shading • Local illumination: – Light calculations are done locally without the global scene – No cast shadows (since those would be from other objects, hence global) – Object shadows are OK, only depend on the surface normal ! • Simple idea: Loop over all polygons • For each polygon: – Determine the pixels it occupies on the screen and their color – Draw using e.g., Z-buffer algorithm to get occlusion right ! • Each polygon only considered once • Some pixels considered multiple times • More efficient: Scan-line algorithms LMU München – Medieninformatik – Andreas Butz – Computergrafik 1 – SS2015 – Kapitel 7 3 ! Scan-Line Algorithms in More Detail • Polygon Table (PT): – List of all polygons with plane equation parameters, color information and inside/outside flag (see rasterizaton) ! • Edge Table (ET): – List of all non-horizontal