Machine Vision for Ripeness Estimation in Viticulture Automation
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Xylella Fastidiosa HOST: GRAPEVINE
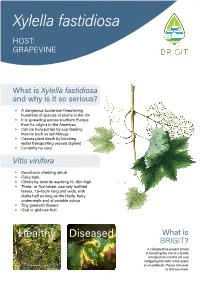
Xylella fastidiosa HOST: GRAPEVINE What is Xylella fastidiosa and why is it so serious? ◆ A dangerous bacterium threatening hundreds of species of plants in the UK ◆ It is spreading across southern Europe from its origins in the Americas ◆ Can be transported by sap-feeding insects such as spittlebugs ◆ Causes plant death by blocking water transporting vessels (xylem) ◆ Currently no cure Vitis vinifera ◆ Deciduous climbing shrub ◆ Flaky bark ◆ Climbs by tendrils reaching 15–18m high ◆ Three- or five-lobed, coarsely toothed leaves, 7.5–15cm long and wide, with stalks half as long as the blade, hairy underneath and of variable colour ◆ Tiny greenish flowers ◆ Oval or globose fruit Healthy Diseased What is BRIGIT? A collaborative project aimed at reducing the risk of a Xylella introduction into the UK and mitigating the risks in the event of an outbreak. Please turn over to find out more. What to look 1 out for 2 ◆ Marginal leaf scorch 1 ◆ Leaf chlorosis 2 ◆ Premature loss of leaves 3 ◆ Matchstick petioles 3 ◆ Irregular cane maturation (green islands in stems) 4 ◆ Fruit drying and wilting 5 ◆ Stunting of new shoots 5 ◆ Death of plant in 1–5 years Where is the plant from? 3 ◆ Plants sourced from infected countries are at a much higher risk of carrying the disease-causing bacterium Do not panic! 4 How long There are other reasons for disease symptoms to appear. Consider California. of University Montpellier; watercolour, RHS Lindley Collections; “healthy”, RHS / Tim Sandall; “diseased”, J. Clark, California 3 J. Clark & A.H. Purcell, University of California 4 J. Clark, University of California 5 ENSA, Images © 1 M. -

So You Want to Grow Grapes in Tennessee
Agricultural Extension Service The University of Tennessee PB 1689 So You Want to Grow Grapes in Tennessee 1 conditions. American grapes are So You Want to Grow versatile. They may be used for fresh consumption (table grapes) or processed into wine, juice, jellies or Grapes in Tennessee some baked products. Seedless David W. Lockwood, Professor grapes are used mostly for fresh Plant Sciences and Landscape Systems consumption, with very little demand for them in wines. Yields of seedless varieties do not match ennessee has a long history of grape production. Most recently, those of seeded varieties. They are T passage of the Farm Winery Act in 1978 stimuated an upsurge of also more susceptible to certain interest in grape production. If you are considering growing grapes, the diseases than the seeded American following information may be useful to you. varieties. French-American hybrids are crosses between American bunch 1. Have you ever grown winery, the time you spend visiting and V. vinifera grapes. Their grapes before? others will be a good investment. primary use is for wine. uccessful grape production Vitis vinifera varieties are used S requires a substantial commit- 3. What to grow for wine. Winter injury and disease ment of time and money. It is a American problems seriously curtail their marriage of science and art, with a - seeded growth in Tennessee. good bit of labor thrown in. While - seedless Muscadines are used for fresh our knowledge of how to grow a French-American hybrid consumption, wine, juice and jelly. crop of grapes continues to expand, Vitis vinifera Vines and fruits are not very we always need to remember that muscadine susceptible to most insects and some crucial factors over which we Of the five main types of grapes diseases. -

CHABLIS LES CLOS GRAND CRU 2017 100% Chardonnay Although I’Ve Said It Before, It’S Worth Repeating: Drouhin Is One of the Top Producers in Chablis
CHABLIS LES CLOS GRAND CRU 2017 100% Chardonnay Although I’ve said it before, it’s worth repeating: Drouhin is one of the top producers in Chablis. - WineReviewOnline.com The vineyard site is the largest and probably most famous Grand Cru, located between Valmur on the left and Blanchot on the right. The exposure is responsible for its generous and powerful character. It is the cradle of Chablis, already recognized by the medieval monks as a superb location for planting a vineyard. The term “Les Clos” (enclosure, in French) probably refers to the surrounding wall that they built to fence off the parcel. This wall is no longer in existence. At the end of the 19th Century the vineyard was devastated by the phylloxera disease. In the 1960’s, Robert Drouhin was one of the first Beaune propriétaires to bring it back to life. Vineyard site: • Soil: the Kimmeridgian limestone contains millions of tiny marine fossils embedded in a kind of whitish mortar which may have been once the bottom of the sea...hundreds of million years ago. • This marine origin gives the wines of Chablis their unique flavour. • Drouhin estate: 1.3 ha. (3.212 acres). Average age of the vines: 37 years. Viticulture: • Plantation density: 8,000 to 10,000 stocks/ha. • Pruning: double Guyot “Vallée de la Marne” (for its resistance to frost). • Yield: we aim for a lower yield in order to extract all possible nuances from the terroir. • Average yield at the Domaine: 43.2hl/ha (authorized for the appellation is now 54hl/ha). Ageing • Type: in oak barrel (0% new wood). -

Wines of Alentejo Varieties by Season Sustainability Program (WASP) 18 23 24
Alentejo History Alentejo The 8 sub-regions of DOC the 'Alentejo' PDO 2 6 8 'Alentejano' Grape Red Grape PGI Varieties Varieties 10 13 14 The Alentejo White Grape Viticulture Season Wines of Alentejo Varieties by Season Sustainability Program (WASP) 18 23 24 Wine Tourism Alentejo Wine Grapes used in Gastronomy Wines of Alentejo blends 26 28 30 Facts and Guarantee Figures of Origin 33 36 WINES OF ALENTEJO UNIQUE BY NATURE CVRA - COMISSÃO VITIVINÍCOLA REGIONAL ALENTEJANA Copy: Rui Falcão Photographic credits: Nuno Luis, Tiago Caravana, Pedro Moreira and Fabrice Demoulin Graphic design: Duas Folhas With thanks to Essência do Vinho The AlentejoWINE REGION There is something profoundly invigorating and liberating about the Alentejo landscape: its endlessly open countryside, gently undulating plains, wide blue skies and distant horizons. The landscape mingles with the vines and cereal crops – an ever-changing canvas of colour: intensely green towards the end of winter, the colour of straw at the end of spring, and deep ochre during the final months of summer. 1 All over the Alentejo there are archaeological markers suggesting that wine has Historybeen an important part of life up to the present day. Whilst it is not known exactly when wine and viticulture was introduced to the Alentejo, there is plenty of evidence that they were already part of the day-to-day life in the Alentejo by the time the Romans arrived in the south of Portugal. It is thought that the Tartessians, an ancient civilisation based in the south of the Iberian Peninsula and heirs of the Andalusian Megalithic culture, were the first to domesticate vineyards and introduce winemaking principles in the Alentejo. -

Growing Grapes in Missouri
MS-29 June 2003 GrowingGrowing GrapesGrapes inin MissouriMissouri State Fruit Experiment Station Missouri State University-Mountain Grove Growing Grapes in Missouri Editors: Patrick Byers, et al. State Fruit Experiment Station Missouri State University Department of Fruit Science 9740 Red Spring Road Mountain Grove, Missouri 65711-2999 http://mtngrv.missouristate.edu/ The Authors John D. Avery Patrick L. Byers Susanne F. Howard Martin L. Kaps Laszlo G. Kovacs James F. Moore, Jr. Marilyn B. Odneal Wenping Qiu José L. Saenz Suzanne R. Teghtmeyer Howard G. Townsend Daniel E. Waldstein Manuscript Preparation and Layout Pamela A. Mayer The authors thank Sonny McMurtrey and Katie Gill, Missouri grape growers, for their critical reading of the manuscript. Cover photograph cv. Norton by Patrick Byers. The viticulture advisory program at the Missouri State University, Mid-America Viticulture and Enology Center offers a wide range of services to Missouri grape growers. For further informa- tion or to arrange a consultation, contact the Viticulture Advisor at the Mid-America Viticulture and Enology Center, 9740 Red Spring Road, Mountain Grove, Missouri 65711- 2999; telephone 417.547.7508; or email the Mid-America Viticulture and Enology Center at [email protected]. Information is also available at the website http://www.mvec-usa.org Table of Contents Chapter 1 Introduction.................................................................................................. 1 Chapter 2 Considerations in Planning a Vineyard ........................................................ -

Oregon Wine Research Institute Viticulture & Enology Technical Newsletter Spring 2019
OREGON WINE RESEARCH INSTITUTE VITICULTURE & ENOLOGY TECHNICAL NEWSLETTER SPRING 2019 Welcome to the Spring 2019 Newsletter This edition contains research updates and a comprehensive list of In this issue: publications summarizing research conducted by faculty of the Oregon • Cluster thinning research: Wine Research Institute at Oregon State University. Dr. Patty Skinkis, OSU What are the limits? Viticulture Extension Specialist and Professor, opens the newsletter with • Effective microbial an article on canopy yield management. Dr. James Osborne, OSU Enology monitoring is key to Extension Specialist and Associate Professor, discusses the importance of preventing microbial spoilage effective microbial monitoring in preventing microbial spoilage. Lastly, Sarah • Fits like a glove: Improving Lowder, OSU Graduate Research Assistant, along with Dr. Walt Mahaffee, sampling techniques to Research Plant Pathologist, USDA-ARS, provide an article on techniques to monitor Qol fungicide monitor Qol fungicide resistant grape powdery mildew. resistant grape powdery This issue is posted online at the OWRI website https://owri.oregonstate. mildew edu/owri/extension-resources/owri-newsletters. Learn more about our • Research Publications research and engage with the core faculty here. Cheers, The OWRI Team Editorial Team Crop thinning research: What are the limits? Denise L. Dewey Dr. Patty Skinkis, Viticulture Extension Specialist and Professor, OSU Lead Editor Oregon Wine Research Institute [email protected] The yield-quality paradigm has long driven vineyard management decision- making, with growers focusing on the level of cluster thinning needed to Dr. Patty Skinkis reach target yields. The general thought is that reducing yield will improve Viticulture Editor ripeness and quality, allowing the remaining fruit to accumulate desirable Oregon Wine Research Institute [email protected] aroma, flavor, and color compounds. -

Lodi. Not Just Zinfandel When Many People Think About Lodi, the Rst Thing That Comes to Mind Is Zinfandel and Quite O En, Other Lower Price Bulk Produced Wines
Lodi. Not just Zinfandel When many people think about Lodi, the rst thing that comes to mind is Zinfandel and quite oen, other lower price bulk produced wines. But nothing could be further from the truth and today Lodi is considered by many as one of California's most innovative grow- ing areas. Even though wine grapes have ourished in Lodi since the later part of the 19th Century, it is oen thought of as a "new up-and-coming discovery" in California wines. Old Vine Zinfandel (and they are really old with some vines dating to the 1880s) represents the largest portion of vineyard land in the AVA. But more than 100 varietals are planted in Lodi's 100,000+ vineyard acres - most with Old World ancestry from France, Spain, Italy, Portugal etc. ere are countless soil types and microclimates throughout the area that encourage extensive exploration and experimentation on the part of progressive and courageous growers. Lodi was also the rst California AVA to establish very strict 3rd-party certied rules (the Lodi Rules Sustainable Winegrowing Program) governing sustainable growing methods as well as the industry's impact on the environment and the local economy. Lodi is more than just Zinfandel and hopefully, today's column will introduce you to some if its hidden splendor. I hope you enjoy reading my thoughts and as always I invite you to share your comments and questions with other readers. Napa Valley Register APRIL 18, 2019 e Wine Exchange | Allen R. Balik Lodi. Not just Zinfandel e Lodi American Viticultural Area (AVA) is nestled between San Francisco and the Sierra Nevada Mountains in the northernmost part of California's Central Valley. -
Understanding South African Chenin Blanc Wine by Using Data Mining Techniques Applied to Published Sensory Data
Understanding South African Chenin Blanc wine by using data mining techniques applied to published sensory data by Carlo Cesar Valente Thesis presented in partial fulfilment of the requirements for the degree of Master of Science at Stellenbosch University Institute of Wine Biotechnology, Faculty of AgriSciences Supervisor: Dr Helene Nieuwoudt Co-supervisor: Professor Florian Bauer March 2016 Stellenbosch University https://scholar.sun.ac.za Declaration By submitting this thesis electronically, I declare that the entirety of the work contained therein is my own, original work, that I am the sole author thereof (save to the extent explicitly otherwise stated), that reproduction and publication thereof by Stellenbosch University will not infringe any third party rights and that I have not previously in its entirety or in part submitted it for obtaining any qualification. Date: March 2016 Copyright © 2016 Stellenbosch University All rights reserved Stellenbosch University https://scholar.sun.ac.za Summary South African Chenin Blanc is the most planted grape cultivar in South Africa (SA) and is known for its versatility in wine sensory profiles. However, according to the South African wine industry, consumers are confused as to the different styles that make up Chenin Blanc wine. Currently, there are six different style classifications for South African Chenin Blanc wine that was proposed as a guideline by the Chenin Blanc Association (CBA). Previous research conducted at the University of Stellenbosch was aimed at evaluating these style classifications. Previous results showed that, when using a small sample set of commercial Chenin Blanc, only two clear style categories could be identified – Fresh and Fruity and Rich and Ripe Wooded. -

Dual RNA Sequencing of Vitis Vinifera During Lasiodiplodia Theobromae Infection Unveils Host–Pathogen Interactions
International Journal of Molecular Sciences Article Dual RNA Sequencing of Vitis vinifera during Lasiodiplodia theobromae Infection Unveils Host–Pathogen Interactions Micael F. M. Gonçalves 1 , Rui B. Nunes 1, Laurentijn Tilleman 2 , Yves Van de Peer 3,4,5 , Dieter Deforce 2, Filip Van Nieuwerburgh 2, Ana C. Esteves 6 and Artur Alves 1,* 1 Department of Biology, CESAM, University of Aveiro, 3810-193 Aveiro, Portugal; [email protected] (M.F.M.G.); [email protected] (R.B.N.) 2 Laboratory of Pharmaceutical Biotechnology, Campus Heymans, Ottergemsesteenweg 460, B-9000 Ghent, Belgium; [email protected] (L.T.); [email protected] (D.D.); [email protected] (F.V.N.) 3 Department of Plant Biotechnology and Bioinformatics, Ghent University, 9052 Ghent, Belgium; [email protected] 4 Center for Plant Systems Biology, VIB, 9052 Ghent, Belgium 5 Department of Biochemistry, Genetics and Microbiology, University of Pretoria, Pretoria 0028, South Africa 6 Faculty of Dental Medicine, Center for Interdisciplinary Research in Health (CIIS), Universidade Católica Portuguesa, Estrada da Circunvalação, 3504-505 Viseu, Portugal; [email protected] * Correspondence: [email protected]; Tel.: +351-234-370-766 Received: 28 October 2019; Accepted: 29 November 2019; Published: 3 December 2019 Abstract: Lasiodiplodia theobromae is one of the most aggressive agents of the grapevine trunk disease Botryosphaeria dieback. Through a dual RNA-sequencing approach, this study aimed to give a broader perspective on the infection strategy deployed by L. theobromae, while understanding grapevine response. Approximately 0.05% and 90% of the reads were mapped to the genomes of L. -
Grapevine Leaf Blade Sampling
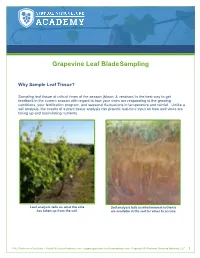
Grapevine Leaf Blade Sampling Why Sample Leaf Tissue? Sampling leaf tissue at critical times of the season (bloom & veraison) is the best way to get feedback in the current season with regard to how your vines are responding to the growing conditions, your fertilization program, and seasonal fluctuations in temperature and rainfall. Unlike a soil analysis, the results of a plant tissue analysis can provide real-time input on how well vines are taking up and assimilating nutrients. Leaf analysis tells us what the vine Soil analysis tells us what mineral nutrients has taken up from the soil. are available in the soil for vines to access. Fritz Westover–Viticulturist • VirtualViticultureAcademy.com • [email protected] • Copyright © Westover Vineyard Advising, LLC 1 Leaf Blade Sampling at Bloom Sampling at bloom gives you the chance to optimize vine nutrition to improve cluster growth and berry ripening. Bloom or full bloom 50-75% Beginning of flowering or trace caps fallen Bloom or full bloom bloom 0-30% caps fallen 50-75% caps fallen Flower Cap Fritz Westover–Viticulturist • VirtualViticultureAcademy.com • [email protected] • Copyright © Westover Vineyard Advising, LLC 2 Flower cluster in various stages of bloom and fruit set. Sample time range is from 1 week before to 1 week after bloom. Quick Tip: The optimal time for bloom nutrient sampling is when your earliest variety is at 25-50% bloom. Sample leaves with petioles attached from a location adjacent to flowers. Be consistent – if sampling adjacent to 2nd cluster, repeat for all samples in block. Fritz Westover–Viticulturist • VirtualViticultureAcademy.com • [email protected] • Copyright © Westover Vineyard Advising, LLC 3 Leaf Blade Sampling at Veraison Sampling at veraison allows you to see how effective your fertilization program was for the current season and what nutrients your vines need before bloom of the next season. -

An Economic Survey of the Wine and Winegrape Industry in the United States and Canada
An Economic Survey of the Wine and Winegrape Industry in the United States and Canada Daniel A. Sumner, Helene Bombrun, Julian M. Alston, and Dale Heien University of California, Davis Revised draft December 2, 2001 The wine industry in the United States and Canada is new by Old World standards but old by New World standards. The industry has had several rebirths, so specifying its age may depend on the purpose of the investigation. In the colonial and post-colonial period up through the middle of the 19th Century, it was a relatively tiny industry with imports accounting for almost all of the still meager consumption of quality wine in the region (Winkler, et al.). There was gradual development in the latter half of the 19th century, but wine production in the United States and Canada only began to develop significantly with the expansion of the California industry early in the 20th century (Carosso; Hutchinson). Then the industry needed to be recreated after the prohibition era from 1920 to 1932. More recently, in a sense, the industry was reborn again thirty or so years ago with an aggressive movement towards higher quality. The geography of the industry is relatively simple. Despite some wine and winegrape production in Canada and most states in the United States, California is the location of more than 90 percent of grape crush and about 85 percent of the wine production in North America (Wine Institute). Therefore, most of the discussion of grape and wine production in this chapter focuses on California. The discussion of demand and policy issues, of course, covers all of the United States and Canada. -

Marquette and Frontenac: Ten Viticulture Tips John Thull and Jim Luby University of Minnesota
Marquette and Frontenac: Ten Viticulture Tips John Thull and Jim Luby University of Minnesota Photo by Dave Hansen Photo by Nicholas Howard Univ. of Minnesota Marquette • Introduced in 2006 by UMN • MN1094 x Ravat 262 Photo by Steve Zeller, Parley Lake Winery Marquette Site Selection and Vineyard Establishment • Hardiness will be compromised on wet, fertile sites. – Always avoid low spots for planting. Photo by David L. Hansen, University of Minnesota Marquette Site Selection and Vineyard Establishment • Primary shoots are invigorated on VSP trellises. – Can be favorable on less fertile sites. – Yields will suffer if planted to VSP on very fertile ground. • High Cordon training generally recommended for higher yields. Photo by David L. Hansen, University of Minnesota Marquette Training and Pruning • Heavier average cluster weights from longer spurs and even 10-12 bud canes than from short spurs. • 6 to 8 buds per trellis foot can give good yields for vines spaced 6 feet apart. Photo by David L. Hansen, University of Minnesota Marquette Training and Pruning • Early Bud Break – some growers double prune or use dormancy inducing spray on Marquette. – Strong tendrils can slow down the pruning process. Photo by David L. Hansen, University of Minnesota Marquette Training and Pruning • Lateral shoot development is substantial. – Summer lateral shoots coming from the leaf axils should be removed around the fruit zone. Photo by David L. Hansen, University of Minnesota Marquette Disease and Pest Management • Black Rot, Anthracnose, and Powdery Mildew infections can become severe if not treated timely. – Very good resistance to Downy Mildew Photo by David L. Hansen, University of Minnesota Marquette Harvest Considerations • Fruit sugar levels can surpass 26 Brix.