High Frequency Subsurface Lagrangian Measurements in the California Current with RAFOS Floats
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Ebb and Flow Tides and Life on Our Once and Future Planet
This article has This been published in or collective redistirbution of any portion of this article by photocopy machine, reposting, or other means is permitted only with the approval of The approval portionthe ofwith any permitted articleonly photocopy by is machine, of this reposting, means or collective or other redistirbution BOOK REVIEWS Ebb and Flow Oceanography Tides and Life on Our Once and Future Planet , V By Tom Koppel, The Dundurn Group, which is the loss of much of the fleet of olume 21, Number 2, a quarterly journal of journal The olume 21, Number 2, a quarterly 2007, 296 pages, ISBN 9781550027266, Alexander the Great due to a tidal bore), Paperback, $26.99 US coastal ecosystems, modern analysis, and extracting energy from tides. Chapter 1 REVIEWED BY JOHN L. LuiCK contains an account of the ancient tidal dockyards at Lothal, India—surely a can- Ebb and Flow: Tides and Life on Our didate for “Engineering Wonders of the Once and Future Planet is well titled. It Ancient World.” The most ambitious and O tells the story of tides, why they matter, original chapter is the final one, whose ceanography Society. Society. ceanography what causes them, and how they have three subheadings are Sea Level Change changed over time. The author, Tom Causes Intertidal Zones to Migrate; Giant all sorts of ammonia and phosphoric Koppel, is not an analyst or theoretician Ancient Tides and Earth’s Rotation; and salts.” Again, tides are shown to play a C of tides but a man of inquisitive mind The Origin, Evolution, and Future of Life crucial role in both the origin and the opyright 2008 by The 2008 by opyright and substantial beachcombing and on Earth. -

The Evolution and Demise of North Brazil Current Rings*
VOLUME 36 JOURNAL OF PHYSICAL OCEANOGRAPHY JULY 2006 The Evolution and Demise of North Brazil Current Rings* DAVID M. FRATANTONI Department of Physical Oceanography, Woods Hole Oceanographic Institution, Woods Hole, Massachusetts PHILIP L. RICHARDSON Department of Physical Oceanography, Woods Hole Oceeanographic Institution, and Associated Scientists at Woods Hole, Woods Hole, Massachusetts (Manuscript received 27 May 2004, in final form 26 October 2005) ABSTRACT Subsurface float and surface drifter observations illustrate the structure, evolution, and eventual demise of 10 North Brazil Current (NBC) rings as they approached and collided with the Lesser Antilles in the western tropical Atlantic Ocean. Upon encountering the shoaling topography east of the Lesser Antilles, most of the rings were deflected abruptly northward and several were observed to completely engulf the island of Barbados. The near-surface and subthermocline layers of two rings were observed to cleave or separate upon encountering shoaling bathymetry between Tobago and Barbados, with the resulting por- tions each retaining an independent and coherent ringlike vortical circulation. Surface drifters and shallow (250 m) subsurface floats that looped within NBC rings were more likely to enter the Caribbean through the passages of the Lesser Antilles than were deeper (500 or 900 m) floats, indicating that the regional bathymetry preferentially inhibits transport of intermediate-depth ring components. No evidence was found for the wholesale passage of rings through the island chain. 1. Introduction ration from the NBC, anticyclonic rings with azimuthal speeds approaching 100 cm sϪ1 move northwestward a. Background toward the Caribbean Sea on a course parallel to the The North Brazil Current (NBC) is an intense west- South American coastline (Johns et al. -

Lagrangian Measurement of Subsurface Poleward Flow Between 38 Degrees N and 43 Degrees N Along the West Coast of the United States During Summer, 1993
CORE Metadata, citation and similar papers at core.ac.uk Provided by Calhoun, Institutional Archive of the Naval Postgraduate School Calhoun: The NPS Institutional Archive Faculty and Researcher Publications Faculty and Researcher Publications 1996-09-01 Lagrangian Measurement of subsurface poleward Flow between 38 degrees N and 43 degrees N along the West Coast of the United States during Summer, 1993 Collins, Curtis A. Geophysical Research Letters, Vol. 23, No. 18, pp. 2461-2464, September 1, 1996 http://hdl.handle.net/10945/45730 GEOPHYSICAL RESEARCH LETTERS, VOL. 23, NO. 18, PAGES 2461-2464, SEPTEMBER 1, 1996 Lagrangian Measurement of subsurface poleward Flow between 38øN and 43øN along the West Coast of the United States during Summer, 1993 CurtisA. Collins,Newell Garfield, Robert G. Paquette,and Everett Carter 1 Departmentof Oceanography,Naval Postgraduate School, Monterey, California Abstract. SubsurfaceLagrangian measurementsat about Undercurrentalong the coastsof California and Oregon. We 140 m showedthat the pathof the CaliforniaUndercurrent lay are using quasi-isobaric(float depth controlled primarily by next to the continentalslope betweenSan Francisco(37.80N) the pressureeffect on density)RAFOS floats (Rossby et al., and St. GeorgeReef (41.8øN) duringmid-summer 1993. The 1986) to make these measurements. A RAFOS float consists meanspeed along this 500 km pathwas 8 cms-1. Theflow at of a hydrophonemounted in a glasstube that is about2 meters this depth was not disturbedby upwelling centersat Point long. These hydrophonesreceive signals from three sound Reyesor CapeMendocino. Restfits also demonstratethe abil- sources that were moored 400 km offshore between 34.3øN and ity to acousticallytrack floats located well above the sound 40.4øN.The sound sources emit 15 W, 80 s signalsa•t 260 Hz channelaxis along the California coast. -

Particle Pathways in the Gulf Stream
Particle Pathways and P-T Shaw2 in the Gulf Stream Abstract East of Cape Hatteras, the Gulf Stream front separates two water masses: Sargasso Sea water to the south and the An experiment is under way to study the kinematics, dynamics, and cold slope waters to its north. The sharpness of the water mass path evolution of the Gulf Stream front between Cape Hatteras and boundary along the current's cyclonic edge and its coincidence 60°W. The Rafos float, which can track the true motion of water with the stream suggests that the front is impermeable to parcels along density surfaces which slope steeply across the Gulf Stream, has recently been developed for this study. These instruments cross-stream exchange of water. (It should be noted that this are launched in the center of the Gulf Stream every 5-15 days for a distinction of separate water masses loses validity below the 30-day mission. Each float provides a trajectory and a continuous midthermocline, where increasing uniformity of water prop- record of temperature and pressure along the trajectory. Our results erties suggests greater cross-stream exchange.) The Gulf so far show that: a) cross-stream motion has a significant vertical -1 Stream is not so isolated from the Sargasso Sea, however. Be- component (ranging to some 0.1 cm • s ) compared to vertical veloc- ities in midocean; b) floats systematically shoal (upwell) as they ap- tween the Florida Straits and Cape Hatteras the transport of proach anticyclonic meanders and deepen (downwell) as they ap- water more than doubles, with nearly all the new water coming proach cyclonic meanders; c) more than half of the floats launched from the Sargasso Sea. -

Characteristics of Intermediate Water Flow in the Benguela Current As
Deep-Sea Research II 50 (2003) 87–118 Characteristics of intermediate water flow in the Benguela current as measured with RAFOS floats P.L. Richardsona,*, S.L. Garzolib a Department of Physical Oceanography, Woods Hole Oceanographic Institution, 360 Woods Hole Road, Woods Hole, MA 02543, 3 Water Street, P.O. Box 721, USA b Atlantic Oceanographic and Meteorological Laboratory, NOAA, 4301 Rickenbacker Causeway, Miami, FL 33149, USA Received 28 September 2001; accepted 26 July 2002 Abstract Seven floats (not launched in rings) crossed over the mid-Atlantic Ridge in the Benguela extension with a mean westward velocity of around 2 cm=s between 22S and 35S. Two Agulhas rings crossed over the mid-Atlantic Ridge with a mean velocity of 5:7cm=s toward 2851: This implies they translated at around 3:8cm=s through the background velocity field near 750 m: The boundaries of the Benguela Current extension were clearly defined from the observations. At 750 m the Benguela extension was bounded on the south by 35S and the north by an eastward current located between 18S and 21S. Other recent float measurements suggest that this eastward current originates near the Trindade Ridge close to the western boundary and extends across most of the South Atlantic, limiting the Benguela extension from flowing north of around 20S. The westward transport of the Benguela extension was estimated to be 15 Sv by integrating the mean westward velocities from 22S to 35S and multiplying by the 500 m estimated thickness of intermediate water. Roughly 1.5 Sv of this are transported by the B3 Agulhas rings that cross the mid-Atlantic Ridge each year (as observed with altimetry). -

Spatial and Interannual Variability in Mesoscale Circulation in the Northern California Current System Julie E
JOURNAL OF GEOPHYSICAL RESEARCH, VOL. 113, C04015, doi:10.1029/2007JC004256, 2008 Click Here for Full Article Spatial and interannual variability in mesoscale circulation in the northern California Current System Julie E. Keister1 and P. Ted Strub1 Received 31 March 2007; revised 16 October 2007; accepted 5 December 2007; published 12 April 2008. [1] We used wavelet analyses of sea surface height (SSH) from >13 years of satellite altimeter data to characterize the variability in mesoscale circulation in the northern California Current (35°N–49°N) and explore the mechanisms of variability. We defined ‘‘mesoscale’’ circulation as features, such as eddies and filaments, which have 50- to 300-km length scales and 4- to 18-week temporal scales. Fluctuations in SSH caused by such features were reflected in wavelet analyses as power (energy). Spatial and interannual variation in mesoscale energy was high. Energy was highest at 38°N, decreasing to the north and south. Between 43°N and 48°N, energy was low. Zonally, mesoscale energy was highest between 125°W and 129°W at latitudes south of 44°N; very little power occurred in the deep ocean west of 130°W. Energy peaked during summer/fall in most years. The primary climate signals were suppressed energy during La Nin˜a and cold years and increased energy during El Nin˜o events. Energy was not strongly linked to upwelling winds, but did correspond to climate indices, indicating that basin-scale processes play a role in controlling mesoscale circulation. We hypothesize that climate affects mesoscale energy through changes in both potential and kinetic energy in the form of density gradients and coastal upwelling winds. -

Deep Eddies in the Gulf of Mexico Observed with Floats
NOVEMBER 2018 F U R E Y E T A L . 2703 Deep Eddies in the Gulf of Mexico Observed with Floats HEATHER FUREY AND AMY BOWER Department of Physical Oceanography, Woods Hole Oceanographic Institution, Woods Hole, Massachusetts PAULA PEREZ-BRUNIUS Department of Physical Oceanography, Ensenada Center for Scientific Research and Higher Education (CISESE), Ensenada, Mexico PETER HAMILTON North Carolina State University, Raleigh, North Carolina ROBERT LEBEN Colorado Center for Astrodynamics Research, University of Colorado Boulder, Boulder, Colorado (Manuscript received 20 November 2017, in final form 9 August 2018) ABSTRACT A new set of deep float trajectory data collected in the Gulf of Mexico from 2011 to 2015 at 1500- and 2500-m depths is analyzed to describe mesoscale processes, with particular attention paid to the western Gulf. Wavelet analysis is used to identify coherent eddies in the float trajectories, leading to a census of the basinwide coherent eddy population and statistics of the eddies’ kinematic properties. The eddy census reveals a new formation region for anticyclones off the Campeche Escarpment, located northwest of the Yucatan Peninsula. These eddies appear to form locally, with no apparent direct connection to the upper layer. Once formed, the eddies drift westward along the northern edge of the Sigsbee Abyssal Gyre, located in the southwestern Gulf of Mexico over the abyssal plain. The formation mechanism and upstream sources for the Campeche Escarpment eddies are explored: the observational data suggest that eddy formation may be linked to the collision of a Loop Current eddy with the western boundary of the Gulf. Specifically, the disintegration of a deep dipole traveling under the Loop Current eddy Kraken, caused by the interaction with the northwestern continental slope, may lead to the acceleration of the abyssal gyre and the boundary current in the Bay of Campeche region. -

Feasibility of Disposal of High-Level Radioactive Waste Into the Seabed
FEASIBILITY OF DISPOSAL OF HIGH-LEVEL RADIOACTIVE WASTE INTO THE SEABED VOLUME5 DISPERSAL OF RADIONUCLIDES IN THE OCEANS : MODELS, DATA SETS AND REGIONAL DESCRIPTIONS IT 11.0. MABŒTTA AMD mfSDOIOlB NUCLEAR ENERGY AGENCY ORGANISATION FOR ECONOMIC CO-OPERATION AND DEVELOPMENT ORDER FORM SPECIAL 30 % DISCOUNT Use this order form to receive a 30 % discount when you purchase the entire set of the 8 volume series "Feasibility of Disposal of High-Level Radioactive Waste into the Seabed", published by the OECD Nuclear Energy Agency. Please enter my order for ....set(s) at the special 30 % discounted price of FF994 £116.00 US$219 DM427 The volumes may also be purchased individually copy(ies) Volume 1 - OVERVIEW OF RESEARCH AND CONCLUSIONS (66 88 09 1) ISBN 92-64-13164-7 FF90 US$20.00 111.00 DM39 copy(ies) Volume 2 - RADIOLOGICAL ASSESSMENT (66 88 10 1) ISBN 92-64-13165-5 FF220 US$48.50 tn .00 DM95 copy(ies) Volume 3 - GEOSCIENCE CHARACTERIZATION STUDIES (66 88 11 1) ISBN 92-64-13166-3 FF220 US$48.50 £26.00 DM95 .... copy(ies) Volume 4 - ENGINEERING (66 88 12 1) ISBN 92-64-13167-1 FF170 US$37.50 £20.00 DM74 .... copy(ies) Volume 5 - DISPERSAL OF RADIONUCLIDES IN THE OCEANS: MODELS, DATA SETS AND REGIONAL DESCRIPTIONS (66 88 13 1) ISBN 92-64-13168-X ' FF280 US$62 00 £33.00 DM121 .... copy(ies) Volume 6 - DEEP-SEA BIOLOGY, RADIOLOGICAL PROCESSES AND RADIOBIOLOGY (66 88 14 1) ISBN 92-64-13169-8 FF150 US$33.00 £18.00 DM65 copy(ies) Volume 7 - REVIEW OF LABORATORY INVESTIGATIONS OF RADIONUCLIDES MIGRATION THROUGH DEEP-SEA SEDIMENTS (66 88 15 1) ISBN 92-64-13170-1 FF190 US$42.00 £22.50 DM82 ... -

Understanding and Predicting the Gulf of Mexico Loop Current Critical Gaps and Recommendations
THE NATIONAL ACADEMIES PRESS This PDF is available at http://nap.edu/24823 SHARE Understanding and Predicting the Gulf of Mexico Loop Current Critical Gaps and Recommendations DETAILS 110 pages | 7 x 10 | PAPERBACK ISBN 978-0-309-46220-4 | DOI 10.17226/24823 CONTRIBUTORS GET THIS BOOK Committee on Advancing Understanding of Gulf of Mexico Loop Current Dynamics; Gulf Research Program; National Academies of Sciences, Engineering, and Medicine FIND RELATED TITLES Visit the National Academies Press at NAP.edu and login or register to get: – Access to free PDF downloads of thousands of scientific reports – 10% off the price of print titles – Email or social media notifications of new titles related to your interests – Special offers and discounts Distribution, posting, or copying of this PDF is strictly prohibited without written permission of the National Academies Press. (Request Permission) Unless otherwise indicated, all materials in this PDF are copyrighted by the National Academy of Sciences. Copyright © National Academy of Sciences. All rights reserved. Understanding and Predicting the Gulf of Mexico Loop Current Critical Gaps and Recommendations Understanding and Predicting the Gulf of Mexico Loop Current: Critical Gaps and Recommendations Committee on Advancing Understanding of Gulf of Mexico Loop Current Dynamics Gulf Research Program A Consensus Study Report of PREPUBLICATION COPY – Uncorrected Proofs Copyright National Academy of Sciences. All rights reserved. Understanding and Predicting the Gulf of Mexico Loop Current Critical Gaps and Recommendations THE NATIONAL ACADEMIES PRESS 500 Fifth Street, NW Washington, DC 20001 This activity was supported by the Gulf Research Program Fund. Any opinions, findings, conclusions, or recommendations expressed in this publication do not necessarily reflect the views of any organization or agency that provided support for the project. -

The Evolution and Demise of North Brazil Current Rings*
VOLUME 36 JOURNAL OF PHYSICAL OCEANOGRAPHY JULY 2006 The Evolution and Demise of North Brazil Current Rings* DAVID M. FRATANTONI Department of Physical Oceanography, Woods Hole Oceanographic Institution, Woods Hole, Massachusetts PHILIP L. RICHARDSON Department of Physical Oceanography, Woods Hole Oceeanographic Institution, and Associated Scientists at Woods Hole, Woods Hole, Massachusetts (Manuscript received 27 May 2004, in final form 26 October 2005) ABSTRACT Subsurface float and surface drifter observations illustrate the structure, evolution, and eventual demise of 10 North Brazil Current (NBC) rings as they approached and collided with the Lesser Antilles in the western tropical Atlantic Ocean. Upon encountering the shoaling topography east of the Lesser Antilles, most of the rings were deflected abruptly northward and several were observed to completely engulf the island of Barbados. The near-surface and subthermocline layers of two rings were observed to cleave or separate upon encountering shoaling bathymetry between Tobago and Barbados, with the resulting por- tions each retaining an independent and coherent ringlike vortical circulation. Surface drifters and shallow (250 m) subsurface floats that looped within NBC rings were more likely to enter the Caribbean through the passages of the Lesser Antilles than were deeper (500 or 900 m) floats, indicating that the regional bathymetry preferentially inhibits transport of intermediate-depth ring components. No evidence was found for the wholesale passage of rings through the island chain. 1. Introduction ration from the NBC, anticyclonic rings with azimuthal speeds approaching 100 cm sϪ1 move northwestward a. Background toward the Caribbean Sea on a course parallel to the The North Brazil Current (NBC) is an intense west- South American coastline (Johns et al. -

Chapter 2: Ocean Station Data (Osd), Low-Resolution Ctd, Low-Resolution Expendable Xctd, and Plankton
NOAA Atlas NESDIS 72 WORLD OCEAN DATABASE 2013 Timothy P. Boyer, John I. Antonov, Olga K. Baranova, Carla Coleman, Hernan E. Garcia, Alexandra Grodsky, Daphne R. Johnson, Ricardo A. Locarnini, Alexey V. Mishonov, Todd D. O'Brien, Christopher R. Paver, James R. Reagan, Dan Seidov, Igor V. Smolyar, Melissa M. Zweng Editor: Sydney Levitus Technical Editor: Alexey Mishonov National Oceanographic Data Center Ocean Climate Laboratory Silver Spring, MD September 2013 U.S. DEPARTMENT OF COMMERCE Penny S. Pritzker, Secretary National Oceanic and Atmospheric Administration Kathryn D. Sullivan, Acting Under Secretary of Commerce for Oceans and Atmosphere National Environmental Satellite, Data, and Information Service Mary E. Kicza, Assistant Administrator Additional copies of this publication, as well as information about NODC data holdings and services, are available upon request directly from NODC. National Oceanographic Data Center User Services Team NOAA/NESDIS E/OC1 SSMC-3, 4th Floor 1315 East-West Highway Silver Spring, MD 20910-3282 Telephone: (301) 713-3277 Fax: (301) 713-3302 E-mail: [email protected] NODC home page: http://www.nodc.noaa.gov/ For updates on the data, documentation and additional information about WOD13 please refer to: http://www.nodc.noaa.gov/OC5/indprod.html This publication should be cited as: Boyer, T.P., J.I. Antonov, O.K. Baranova, C. Coleman, H.E. Garcia, A. Grodsky, D.R. Johnson, R.A. Locarnini, A.V. Mishonov, T.D. O'Brien, C.R. Paver, J.R. Reagan, D. Seidov, I.V. Smolyar, M.M. Zweng, 2013, World Ocean Database 2013. Sydney Levitus, Ed.; Alexey Mishonov, Technical Ed.; NOAA Atlas NESDIS 72, 209 pp. -
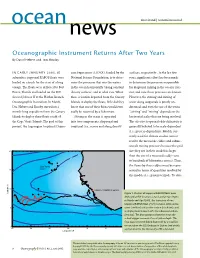
Oceanographic Instrument Returns After Two Years by David Hebert and Tom Rossby
oceannews float found | tsunami measured Oceanographic Instrument Returns After Two Years By David Hebert and Tom Rossby IN EarLY JanUary 2003, 92 sion Experiment (LIDEX), funded by the surfaces, respectively). In the last few subsurface isopycnal RAFOS floats were National Science Foundation, is to deter- years, significant effort has been made loaded on a truck for the start of a long mine the processes that mix the waters to determine the processes responsible voyage. The floats were delivered to Fort in the ocean horizontally (along constant for diapycnal mixing in the ocean’s inte- Pierce, Florida and loaded on the R/V density surfaces) and at what rate. When rior, and now these processes are known. Seward Johnson II at the Harbor Branch these scientists departed from the Canary However, the stirring and mixing of Oceanographic Institution. In March, Islands to deploy the floats, little did they water along isopycnals is poorly un- Drs. Hebert and Rossby started on a know that one of their floats would even- derstood, and even the use of the terms month-long expedition from the Canary tually be returned by a fisherman. “stirring” and “mixing” depends on the Islands to deploy these floats south of Mixing in the ocean is separated horizontal scales that are being resolved. the Cape Verde Islands. The goal of this into two components: diapycnal and The effective isopycnal eddy diffusivity is project, the Lagrangian Isopycnal Disper- isopycnal (i.e., across and along density generally believed to be scale-dependent (i.e., process-dependent). Models cur- rently used for climate studies cannot resolve the mesoscale eddies and subme- soscale mixing processes because the grid size they use in their models is larger than the size of a mesoscale eddy (tens to hundreds of kilometers across).