Sliding Mode Output Regulation for a Boost Power Converter †
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

A Buck-Boost Transformerless DC–DC Converter Based on IGBT Modules for Fast Charge of Electric Vehicles
electronics Article A Buck-Boost Transformerless DC–DC Converter Based on IGBT Modules for Fast Charge of Electric Vehicles Borislav Dimitrov 1,* , Khaled Hayatleh 1, Steve Barker 1, Gordana Collier 1, Suleiman Sharkh 2 and Andrew Cruden 2 1 School of Engineering, Computing and Mathematics, Oxford Brookes University, Wheatley campus, Oxford OX33 1HX, UK; [email protected] (K.H.); [email protected] (S.B.); [email protected] (G.C.) 2 Faculty of Engineering and the Environment, University of Southampton, University Road, Southampton SO17 1BJ, UK; [email protected] (S.S.); [email protected] (A.C.) * Correspondence: [email protected]; Tel.: +44-(0)1865-482962 Received: 9 January 2020; Accepted: 25 February 2020; Published: 28 February 2020 Abstract: A transformer-less Buck-Boost direct current–direct current (DC–DC) converter in use for the fast charge of electric vehicles, based on powerful high-voltage isolated gate bipolar transistor (IGBT) modules is analyzed, designed and experimentally verified. The main advantages of this topology are: simple structure on the converter’s power stage; a wide range of the output voltage, capable of supporting contemporary vehicles’ on-board battery packs; efficiency; and power density accepted to be high enough for such a class of hard-switched converters. A precise estimation of the loss, dissipated in the converter’s basic modes of operation Buck, Boost, and Buck-Boost is presented. The analysis shows an approach of loss minimization, based on switching frequency reduction during the Buck-Boost operation mode. Such a technique guarantees stable thermal characteristics during the entire operation, i.e., battery charge cycle. -

Single Stage Ac-Dc Step up Converter Using Boost and Buck- Boost Converters
ISSN (Print) : 2320 – 3765 ISSN (Online): 2278 – 8875 International Journal of Advanced Research in Electrical, Electronics and Instrumentation Engineering (An ISO 3297: 2007 Certified Organization) Vol. 2, Issue 9, September 2013 SINGLE STAGE AC-DC STEP UP CONVERTER USING BOOST AND BUCK- BOOST CONVERTERS Kumar K1, S.V. Sivanagaraju2, Rajasekharachari k3 PG Student, Department Of EEE, Sri Venkateswara College Of Engg.& Technology, Chittoor, A.P, India1 Associate Professor , Department Of EEE, Sri Venkateswara College Of Engg.& Technology , Chittoor, A.P, India2 PG Student, Department Of EEE, Sri Venkateswara College Of Engg.& Technology, Chittoor, A.P, India3 ABSTRACT: This paper presents a single stage AC-DC step up power converter that avoids the bridge rectification and directly converts the low AC input voltage to the required high DC Output voltage at a higher efficiency. In order to convert AC-DC we need a bridge rectifier and boost converter for step up the DC output voltage to meet the load demand. This two- stage conversion process increases the converter cost and reduces the efficiency of converter due to presence of more no. of semi conductor devices. The proposed converter consists of a boost converter in parallel with a buck–boost converter. Boost converter operated in the positive half cycle and buck-boost converter in the negative half cycle. As a result we obtain a high DC output voltage from a low AC input voltage in single stage conversion. The proposed converter has been designed by using MATLAB. Keywords: AC-DC converter, boost converter, buck-boost converter. I. INTRODUCTION Power electronics may be defined as the subject of applications of solid state power semiconductor devices (Thyristors) for the control and conversion of electric power. -

How to Select a Proper Inductor for Low Power Boost Converter
Application Report SLVA797–June 2016 How to Select a Proper Inductor for Low Power Boost Converter Jasper Li ............................................................................................. Boost Converter Solution / ALPS 1 Introduction Traditionally, the inductor value of a boost converter is selected through the inductor current ripple. The average input current IL(DC_MAX) of the inductor is calculated using Equation 1. Then the inductance can be [1-2] calculated using Equation 2. It is suggested that the ∆IL(P-P) should be 20%~40% of IL(DC_MAX) . V x I = OUT OUT(MAX) IL(DC_MAX) VIN(TYP) x η (1) Where: • VOUT: output voltage of the boost converter. • IOUT(MAX): the maximum output current. • VIN(TYP): typical input voltage. • ƞ: the efficiency of the boost converter. V x() V+ V - V L = IN OUT D IN ΔIL(PP)- xf SW x() V OUT+ V D (2) Where: • ƒSW: the switching frequency of the boost converter. • VD: Forward voltage of the rectify diode or the synchronous MOSFET in on-state. However, the suggestion of the 20%~40% current ripple ratio does not take in account the package size of inductor. At the small output current condition, following the suggestion may result in large inductor that is not applicable in a real circuit. Actually, the suggestion is only the start-point or reference for an inductor selection. It is not the only factor, or even not an important factor to determine the inductance in the low power application of a boost converter. Taking TPS61046 as an example, this application note proposes a process to select an inductor in the low power application. -

Ultra-Efficient Cascaded Buck-Boost Converter
University of Central Florida STARS Electronic Theses and Dissertations, 2004-2019 2017 Ultra-Efficient Cascaded Buck-Boost Converter Anirudh Ashok Pise University of Central Florida Part of the Electrical and Computer Engineering Commons Find similar works at: https://stars.library.ucf.edu/etd University of Central Florida Libraries http://library.ucf.edu This Masters Thesis (Open Access) is brought to you for free and open access by STARS. It has been accepted for inclusion in Electronic Theses and Dissertations, 2004-2019 by an authorized administrator of STARS. For more information, please contact [email protected]. STARS Citation Ashok Pise, Anirudh, "Ultra-Efficient Cascaded Buck-Boost Converter" (2017). Electronic Theses and Dissertations, 2004-2019. 6064. https://stars.library.ucf.edu/etd/6064 ULTRA-EFFICIENT CASCADED BUCK-BOOST CONVERTER by ANIRUDH ASHOK PISE B.E. Nitte Meenakshi Institute of Technology, 2013 A thesis submitted in partial fulfillment of the requirements for the degree of Master of Science in the Department of Electrical and Computer Engineering in the College of Engineering and Computer Science at the University of Central Florida Orlando, Florida Fall Term 2017 Major Professor: Issa Batarseh © 2017 ANIRUDH ASHOK PISE ii ABSTRACT This thesis presents various techniques to achieve ultra-high-efficiency for Cascaded- Buck-Boost converter. A rigorous loss model with component nonlinearities is developed and validated experimentally. An adaptive-switching-frequency control is discussed to optimize weighted efficiency. Some soft-switching techniques are discussed. A low-profile planar-nanocrystalline inductor is developed and various design aspects of core and copper design are discussed. Finite-element-method is used to examine and visualize the inductor design. -
Designing Boost Converter TPS61372 in Low Power Application Report
Application Report SLVAE31–October 2018 Designing Boost Converter TPS61372 in Low Power Application Jasper Li ABSTRACT The application report introduces how to design a small power, small solution size boost converter using the TPS61372 device. The external components of the converter are calculated and selected based on the designed target. The stable and transient performances are measured at different conditions to show the behavior of the converter. Contents 1 Introduction ................................................................................................................... 2 2 External Component Design ............................................................................................... 2 3 Bench Test Result ........................................................................................................... 3 4 Summary...................................................................................................................... 5 5 References ................................................................................................................... 5 List of Figures 1 Operating Mode at Different Load Conditions ........................................................................... 2 2 Output Voltage Ripple at No Load Condition ............................................................................ 3 3 Output Voltage Ripple at 50-mA Load condition ........................................................................ 3 4 Output Ripple at 5-V Output and no load condition .................................................................... -
LECTURE 9 A. Buck-Boost Converter Design 1. Volt-Sec Balance: F(D)
LECTURE 9 A. Buck-Boost Converter Design 1. Volt-Sec Balance: f(D), steady- state transfer function 2. DC Operating Point via Charge Balance: I(D) in steady-state 3. Ripple Voltage / “C” Spec 4. Ripple Current / “L” Spec 5. Peak Switch Currents and Blocking Voltages / Worst Case Transistor Specs B. Practical Issues for L and C Components 1. Inductor:L = f(I)? L= f(fsw)? a. Cost of Cores b. Inductor Core Materials Unique to Each fsw Choice c. Core Saturation above i(crit) B > Bsat, L = f(i) B < Bsat, L ¹ f(i) 2. Capacitor: C(fsw, ic, vc) a. Costs b. Dielectric Materials (1) e(fsw) (2) E(breakdown) C. Appendix 2 A. Buck-boost Converter Design 1.Volt-Sec Balance: f(D), steady-state transfer function We can implement the double pole double throw switch by one actively controlled transistor and one passive diode controlled by the circuit currents so that when Q1 is on D1 is off and when Q1 is off D1 is on. General form Q1-D1 Switch Implementation Q1 D1 1 2 + + Vg v v C R Vg C R i(t) i(t) L - - Two switch cases occur, resulting in two separate circuit topologies. Case 1: SW 1 on, SW 2 off; Transistor Q1 is on Knowing Vout is negative means diode D1 is off and load is not connected to input. This is a unique circuit topology as given below. Only Q1 is active turned on/off by control signals. Input Circuit Topology: Q1 is on; Von small (2V) compared to Vg. -
Measuring and Understanding the Output Voltage Ripple of a Boost Converter
www.ti.com Table of Contents Application Report Measuring and Understanding the Output Voltage Ripple of a Boost Converter Jasper Li ABSTRACT The output ripple waveform of a boost converter is normally larger than the calculation result because of the voltage spike. Such behavior is related to the measurement method, the operating principle and the non-ideal characteristics of the boost circuit. The application note analyzes the root cause of the spike in the output ripple and proposes a simple solutions to solve the problem. Table of Contents 1 Introduction.............................................................................................................................................................................2 2 Observation in Bench Test.....................................................................................................................................................3 3 Root Cause Analysis.............................................................................................................................................................. 5 4 A Simple Solution................................................................................................................................................................... 8 5 Summary............................................................................................................................................................................... 10 List of Figures Figure 1-1. Simplified Schematic of TPS61022.......................................................................................................................... -
DC/DC Converter Output Capacitor Benchmark
DC/DC Converter Output Capacitor Benchmark R. Šponar, R. Faltus, M. Jáně, Z. Flegr, T. Zedníček AVX Czech Republic s.r.o., Dvorakova 328, 563 01 Lanskroun, Czech Republic email: [email protected] Abstract Switched-mode power supplies (SMPS) are commonly found in many electronic systems. Important SMPS requirements are a stable output voltage with load current, good temperature stability, low ripple voltage and high overall efficiency. If the electronic system in question is to be portable, small size and light weight are also important considerations. A key component in switching power systems is the output capacitor – used to store the charge and for smoothing - therefore its careful selection plays a vital role in determining the overall parameters of the power supply. Different capacitor technologies – tantalum, ceramic MLCC, niobium oxide (NbO) and aluminium - are suitable to meet different electrical requirements. This paper presents the results of an output capacitor benchmark study used in a step-down DC/DC converter design, based on a well-used control IC (Maxim’s MAX 1537 – Ref.1) with a 6-24V input voltage range and two separate voltage outputs of 3.3 and 5V. The behaviour of different output capacitor technologies was evaluated by measuring the output ripple voltage. Defined fixed load and fixed switching frequency settings were used for all measurements. Introduction The selection of a suitable output capacitor plays an important part in the design of switching voltage converters. “Some 99 percent of so-called ‘design’ problems associated with linear and switching regulators can be traced directly to the improper use of capacitors”, states the National Semiconductor IC Power Handbook (Ref.2). -

A New Three-Level Flying-Capacitor Boost Converter with an Integrated LC2D Output Network for Fuel-Cell Vehicles: Analysis and Design
Article A New Three-Level Flying-Capacitor Boost Converter with an Integrated LC2D Output Network for Fuel-Cell Vehicles: Analysis and Design Nour Elsayad *, Hadi Moradisizkoohi and Osama Mohammed Energy Systems Research Laboratory, Department of Electrical & Computer Engineering, Florida International University, Miami, FL 33174, USA; [email protected] (H.M.); [email protected] (O.M.) * Correspondence: [email protected]; Tel.: +1-786-328-8450 Received: 21 July 2018; Accepted: 22 August 2018; Published: 28 August 2018 Abstract: In this paper, a new three-level boost converter with continuous input current, common ground, reduced voltage stress on the power switches, and wide voltage gain range is proposed. The proposed converter is composed of a three-level flying-capacitor switching cell and an integrated LC2D output network. The LC2D output network enhances the voltage gain of the converter and reduces the voltage stress on the power switches. The proposed converter is a good candidate to interface fuel cells to the dc-link bus of the three-phase inverter of an electric vehicle (EV). A full steady-state analysis of the proposed converter in the continuous conduction mode (CCM) is given in this paper. A 1.2 kW scaled-down laboratory setup was built using gallium nitride (GaN) transistors and silicon carbide (SiC) diodes to verify the feasibility of the proposed converter. Keywords: boost converter; multilevel; wide-bandgap; GaN; SiC; canonical switching cell; flying capacitor; renewable energy; fuel cells; electric vehicles 1. Introduction There is a growing global interest in reducing greenhouse gases by developing new clean energy technologies that address the challenges associated with the increasing penetration of renewable energy systems and the need to reduce fossil fuel consumption. -
Design of the Boost Converter
© 2017 solidThinking, Inc. Proprietary and Confidential. All rights reserved. An Altair Company BOOST CONVERTER • ACTIVATE solidThinking © 2017 solidThinking, Inc. Proprietary and Confidential. All rights reserved. An Altair Company Description of Boost Converter In a boost converter, the output voltage is greater than the input voltage, hence the name “boost”. The function of boost converter can be divided into two modes, Mode 1 and Mode 2. Mode 1 begins when Switch “ S ” is ON at time t=0. The input current rises and flows through inductor L and Switch. Mode 2 begins when Switch “ S ” is OFF at time t = t1. The input current now flows through L, C, load, and diode . The inductor current falls until the next cycle. The energy stored in inductor L flows through the load. By the proper design of the inductor and the capacitor values and the duty cycle of the triggering pulse with the suitable switching frequency, gives the output from the converter. • ACTIVATE solidThinking © 2017 solidThinking, Inc. Proprietary and Confidential. All rights reserved. An Altair Company Circuit Topology • ACTIVATE solidThinking © 2017 solidThinking, Inc. Proprietary and Confidential. All rights reserved. An Altair Company Inductor & Capacitor Parameters With the Given parameters in the system obtaining the nearest practical calculated values and Simulating the file. The Voltage and the current waveforms of the simulated Boost converter are given below. • ACTIVATE solidThinking © 2017 solidThinking, Inc. Proprietary and Confidential. All rights reserved. An Altair Company Voltage Waveform V o l t a g e Time • ACTIVATE solidThinking © 2017 solidThinking, Inc. Proprietary and Confidential. All rights reserved. An Altair Company Current Waveform C u r r e n t Time • ACTIVATE solidThinking © 2017 solidThinking, Inc. -

(Boost) Converter Covered in Chapter 7 of Mohan, Undeland and Robbins
DC/DC Converters: The Step up (Boost) Converter Covered in Chapter 7 of Mohan, Undeland and Robbins Topics xCircuit and Basic Operation xContinuous Mode Analysis o Voltage Transfer Ratio o Inductor Ripple Current o Input Current o Output Current and Voltage Ripple o Capacitor Ripple Current xDiscontinuous Mode Analysis o Boundary Condition o Duty cycle as a function of current (Constant Vo) Circuit Continuous Mode Boost Converter Waveforms D.Ts (1-D).Ts Switch On Off T s time vL Vd Vo time Vd-Vo iL 'IL IL time IDiode 'IL Average = Io time Continuous Mode Boost Converter Relationships (You must be able to derive) V Voltage Transfer Ratio: V d o (1 D) V .D.T Inductor Peak to Peak Ripple Current: ' I d s L L I Input Current I I o d L (1 D) ' I I Diode Current: Peak to Peak Ripple = I L | I | o L 2 L (1 D) I .esr Peak to Peak Output Voltage Ripple (approximation) = o (1 D) Ripple Current Rating of the Output Capacitor Electrolytic capacitors have a maximum ripple current rating and the output capacitor of the boost converter is exposed to high ripple. The easiest way to determine the required ripple rating of the output capacitor is to use the following relationships, which hold for any waveform: T s I 2 (t).dt ³0 I rms Ts T s I (t).dt ³0 I dc Ts 2 2 2 2 I rms I dc I ac I dc I rms I ac Use the general formula for rms to calculate the rms of the diode current waveform and assume that the ac component of this goes into the capacitor while the dc component flows into the load. -
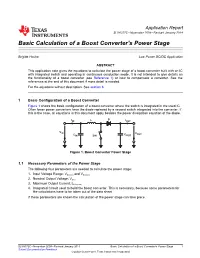
Basic Calculation of a Boost Converter's Power Stage
Application Report SLVA372C–November 2009–Revised January 2014 Basic Calculation of a Boost Converter's Power Stage Brigitte Hauke ......................................................................................... Low Power DC/DC Application ABSTRACT This application note gives the equations to calculate the power stage of a boost converter built with an IC with integrated switch and operating in continuous conduction mode. It is not intended to give details on the functionality of a boost converter (see Reference 1) or how to compensate a converter. See the references at the end of this document if more detail is needed. For the equations without description, See section 8. 1 Basic Configuration of a Boost Converter Figure 1 shows the basic configuration of a boost converter where the switch is integrated in the used IC. Often lower power converters have the diode replaced by a second switch integrated into the converter. If this is the case, all equations in this document apply besides the power dissipation equation of the diode. D IIN L IOUT V IN C VOUT CIN SW OUT Figure 1. Boost Converter Power Stage 1.1 Necessary Parameters of the Power Stage The following four parameters are needed to calculate the power stage: 1. Input Voltage Range: VIN(min) and VIN(max) 2. Nominal Output Voltage: VOUT 3. Maximum Output Current: IOUT(max) 4. Integrated Circuit used to build the boost converter. This is necessary, because some parameters for the calculations have to be taken out of the data sheet. If these parameters are known the calculation of the power stage can take place. SLVA372C–November 2009–Revised January 2014 Basic Calculation of a Boost Converter's Power Stage 1 Submit Documentation Feedback Copyright © 2009–2014, Texas Instruments Incorporated Calculate the Maximum Switch Current www.ti.com 2 Calculate the Maximum Switch Current The first step to calculate the switch current is to determine the duty cycle, D, for the minimum input voltage.