PROJECT ORI'on a Design Study of a System for Detecting Extrasolar Planets
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

FY08 Technical Papers by GSMTPO Staff
AURA/NOAO ANNUAL REPORT FY 2008 Submitted to the National Science Foundation July 23, 2008 Revised as Complete and Submitted December 23, 2008 NGC 660, ~13 Mpc from the Earth, is a peculiar, polar ring galaxy that resulted from two galaxies colliding. It consists of a nearly edge-on disk and a strongly warped outer disk. Image Credit: T.A. Rector/University of Alaska, Anchorage NATIONAL OPTICAL ASTRONOMY OBSERVATORY NOAO ANNUAL REPORT FY 2008 Submitted to the National Science Foundation December 23, 2008 TABLE OF CONTENTS EXECUTIVE SUMMARY ............................................................................................................................. 1 1 SCIENTIFIC ACTIVITIES AND FINDINGS ..................................................................................... 2 1.1 Cerro Tololo Inter-American Observatory...................................................................................... 2 The Once and Future Supernova η Carinae...................................................................................................... 2 A Stellar Merger and a Missing White Dwarf.................................................................................................. 3 Imaging the COSMOS...................................................................................................................................... 3 The Hubble Constant from a Gravitational Lens.............................................................................................. 4 A New Dwarf Nova in the Period Gap............................................................................................................ -

BRAS Newsletter August 2013
www.brastro.org August 2013 Next meeting Aug 12th 7:00PM at the HRPO Dark Site Observing Dates: Primary on Aug. 3rd, Secondary on Aug. 10th Photo credit: Saturn taken on 20” OGS + Orion Starshoot - Ben Toman 1 What's in this issue: PRESIDENT'S MESSAGE....................................................................................................................3 NOTES FROM THE VICE PRESIDENT ............................................................................................4 MESSAGE FROM THE HRPO …....................................................................................................5 MONTHLY OBSERVING NOTES ....................................................................................................6 OUTREACH CHAIRPERSON’S NOTES .........................................................................................13 MEMBERSHIP APPLICATION .......................................................................................................14 2 PRESIDENT'S MESSAGE Hi Everyone, I hope you’ve been having a great Summer so far and had luck beating the heat as much as possible. The weather sure hasn’t been cooperative for observing, though! First I have a pretty cool announcement. Thanks to the efforts of club member Walt Cooney, there are 5 newly named asteroids in the sky. (53256) Sinitiere - Named for former BRAS Treasurer Bob Sinitiere (74439) Brenden - Named for founding member Craig Brenden (85878) Guzik - Named for LSU professor T. Greg Guzik (101722) Pursell - Named for founding member Wally Pursell -

Interstellar Extinction in Orion. Variation of the Strength of the UV
MNRAS 000, 1–9 (2017) Preprint 9 July 2018 Compiled using MNRAS LATEX style file v3.0 Interstellar extinction in Orion. Variation of the strength of the UV bump across the complex. Leire Beitia-Antero,1⋆ Ana I. G´omez de Castro,1† 1AEGORA Research Group, Universidad Complutense de Madrid, Facultad de CC. Matem´aticas, Plaza de Ciencias 3, E-28040 Madrid Accepted XXX. Received YYY; in original form ZZZ ABSTRACT There is growing observational evidence of dust coagulation in the dense filaments within molecular clouds. Infrared observations show that the dust grains size distri- bution gets shallower and the relative fraction of small to large dust grains decreases as the local density increases. Ultraviolet (UV) observations show that the strength of the 2175 A˚ feature, the so-called UV bump, also decreases with cloud density. In this work, we apply the technique developed for the Taurus study to the Orion molecular cloud and confirm that the UV bump decreases over the densest cores of the cloud as well as in the heavily UV irradiated λ Orionis shell. The study has been extended to the Rosette cloud with uncertain results given the distance (1.3 kpc). Key words: ISM: dust, extinction 1 INTRODUCTION feature of the extinction curve, the so-called UV bump. The UV bump is, by far, the strongest spectral feature in the ex- The Interstellar Medium (ISM) is a complex ensemble of tinction curve but its source remains uncertain (see e.g. the gas, large molecules and dust coupled through the action of review by Draine (2003)). -

Cassiopeia a January2008
CASSIOPEIA A JANUARY2008 Cassiopeia A is the youngest (about 300 years old) known supernova Su Mo Tu We Th Fr Sa remnant in the Milky Way. Astronomers have used Chandra’s long ob - 01 02 03 04 05 servations of this remnant to make a map of the acceleration of elec - trons in this supernova remnant. The analysis shows that the electrons 06 07 08 09 10 11 12 are being accelerated to almost the maximum theoretical limit in some 13 14 15 16 17 18 19 parts of Cassiopeia A (Cas A) in what can be thought of as a “relativistic pinball machine.” Protons and ions, which make up the bulk of cosmic 20 21 22 23 24 25 26 rays, are expected to be accelerated in a similar way to the electrons. The Cas A observations thus provide strong evidence that supernova 27 28 29 30 31 remnants are key sites for energizing cosmic rays. 3C442A FEBRUARY2008 X -ray data from NASA’s Chandra X -ray Observatory and radio obser - Su Mo Tu We Th Fr Sa vations from the NSF’s Very Large Array show that a role reversal is 01 02 taking place in the middle of 3C442A - a system with two merging gal - 03 04 05 06 07 08 09 axies in the center. Chandra detects hot gas (blue) that has been push - ing aside the radio -bright gas (orange). This is the opposite of what 10 11 12 13 14 15 16 is typically found in these systems when jets from the supermassive black hole in the center create cavities in the hot gas surrounding the 17 18 19 20 21 22 23 galaxy. -

Multiple Star Systems Observed with Corot and Kepler
Multiple star systems observed with CoRoT and Kepler John Southworth Astrophysics Group, Keele University, Staffordshire, ST5 5BG, UK Abstract. The CoRoT and Kepler satellites were the first space platforms designed to perform high-precision photometry for a large number of stars. Multiple systems dis- play a wide variety of photometric variability, making them natural benefactors of these missions. I review the work arising from CoRoT and Kepler observations of multiple sys- tems, with particular emphasis on eclipsing binaries containing giant stars, pulsators, triple eclipses and/or low-mass stars. Many more results remain untapped in the data archives of these missions, and the future holds the promise of K2, TESS and PLATO. 1 Introduction The CoRoT and Kepler satellites represent the first generation of astronomical space missions capable of large-scale photometric surveys. The large quantity – and exquisite quality – of the data they pro- vided is in the process of revolutionising stellar and planetary astrophysics. In this review I highlight the immense variety of the scientific results from these concurrent missions, as well as the context provided by their precursors and implications for their successors. CoRoT was led by CNES and ESA, launched on 2006/12/27,and retired in June 2013 after an irre- trievable computer failure in November 2012. It performed 24 observing runs, each lasting between 21 and 152days, with a field of viewof 2×1.3◦ ×1.3◦, obtaining light curves of 163000 stars [42]. Kepler was a NASA mission, launched on 2009/03/07and suffering a critical pointing failure on 2013/05/11. It observed the same 105deg2 sky area for its full mission duration, obtaining high-precision light curves of approximately 191000 stars. -

Theoretical Limits of Star Sensor Accuracy †
sensors Article Theoretical Limits of Star Sensor Accuracy † Marcio A. A. Fialho 1,* and Daniele Mortari 2 1 Divisão de Eletrônica Aeroespacial (DIDEA), National Institute for Space Research (INPE), Av. dos Astronautas, 1758, São José dos Campos, SP 12227, Brazil 2 Aerospace Engineering, Texas A&M University, College Station, TX 77843, USA; [email protected] * Correspondence: marcio.fi[email protected]; Tel.: +55-12-3208-6145 † This paper is a revised and extended version of a work previously published as a doctoral thesis chapter. Received: 17 October 2019; Accepted: 25 November 2019; Published: 5 December 2019 Abstract: To achieve mass, power and cost reduction, there is a trend to reduce the volume of many instruments aboard spacecraft, especially for small spacecraft (cubesats or nanosats) with very limited mass, volume and power budgets. With the current trend of miniaturizing spacecraft instruments one could naturally ask if is there a physical limit to this process for star sensors. This paper shows that there is a fundamental limit on star sensor accuracy, which depends on stellar distribution, star sensor dimensions and exposure time. An estimate of this limit is given for our location in the galaxy. Keywords: star sensors; stellar distribution; photometry; astrometry; star catalogs; fundamental limits 1. Introduction Much progress in a variety of fields in science and technology could be accomplished thanks to the miniaturization obtained in microelectronics in the recent decades. One of the most remarkable examples is the prediction by Gordon Moore that the computational power would increase exponentially, an empirical observation that became known as Moore’s law [1–4]. -

An October 2003 Amateur Observation of HD 209458B
Tsunami 3-2004 A Shadow over Oxie Anders Nyholm A shadow over Oxie – An October 2003 amateur observation of HD 209458b Anders Nyholm Rymdgymnasiet Kiruna, Sweden April 2004 Tsunami 3-2004 A Shadow over Oxie Anders Nyholm Abstract This paper describes a photometry observation by an amateur astronomer of a transit of the extrasolar planet HD 209458b across its star on the 26th of October 2003. A description of the telescope, CCD imager, software and method used is provided. The preparations leading to the transit observation are described, along with a chronology. The results of the observation (in the form of a time-magnitude diagram) is reproduced, investigated and discussed. It is concluded that the HD 209458b transit most probably was observed. A number of less successful attempts at observing HD 209458b transits in August and October 2003 are also described. A general introduction describes the development in astronomy leading to observations of extrasolar planets in general and amateur observations of extrasolar planets in particular. Tsunami 3-2004 A Shadow over Oxie Anders Nyholm Contents 1. Introduction 3 2. Background 3 2.1 Transit pre-history: Mercury and Venus 3 2.2 Extrasolar planets: a brief history 4 2.3 Early photometry proposals 6 2.4 HD 209458b: discovery and study 6 2.5 Stellar characteristics of HD 209458 6 2.6 Characteristics of HD 209458b 7 3. Observations 7 3.1 Observatory, equipment and software 7 3.2 Test observation of SAO 42275 on the 14th of April 2003 7 3.3 Selection of candidate transits 7 3.4 Test observation and transit observation attempts in August 2003 8 3.5 Transit observation attempt on the 12th of October 2003 8 3.6 Transit observation attempt on the 26th of October 2003 8 4. -
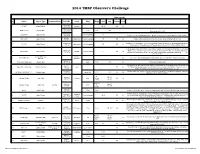
2014 Observers Challenge List
2014 TMSP Observer's Challenge Atlas page #s # Object Object Type Common Name RA, DEC Const Mag Mag.2 Size Sep. U2000 PSA 18h31m25s 1 IC 1287 Bright Nebula Scutum 20'.0 295 67 -10°47'45" 18h31m25s SAO 161569 Double Star 5.77 9.31 12.3” -10°47'45" Near center of IC 1287 18h33m28s NGC 6649 Open Cluster 8.9m Integrated 5' -10°24'10" Can be seen in 3/4d FOV with above. Brightest star is 13.2m. Approx 50 stars visible in Binos 18h28m 2 NGC 6633 Open Cluster Ophiuchus 4.6m integrated 27' 205 65 Visible in Binos and is about the size of a full Moon, brightest star is 7.6m +06°34' 17h46m18s 2x diameter of a full Moon. Try to view this cluster with your naked eye, binos, and a small scope. 3 IC 4665 Open Cluster Ophiuchus 4.2m Integrated 60' 203 65 +05º 43' Also check out “Tweedle-dee and Tweedle-dum to the east (IC 4756 and NGC 6633) A loose open cluster with a faint concentration of stars in a rich field, contains about 15-20 stars. 19h53m27s Brightest star is 9.8m, 5 stars 9-11m, remainder about 12-13m. This is a challenge obJect to 4 Harvard 20 Open Cluster Sagitta 7.7m integrated 6' 162 64 +18°19'12" improve your observation skills. Can you locate the miniature coathanger close by at 19h 37m 27s +19d? Constellation star Corona 5 Corona Borealis 55 Trace the 7 stars making up this constellation, observe and list the colors of each star asterism Borealis 15H 32' 55” Theta Corona Borealis Double Star 4.2m 6.6m .97” 55 Theta requires about 200x +31° 21' 32” The direction our Sun travels in our galaxy. -

Coronal Activity Cycles in 61 Cygni
A&A 460, 261–267 (2006) Astronomy DOI: 10.1051/0004-6361:20065459 & c ESO 2006 Astrophysics Coronal activity cycles in 61 Cygni A. Hempelmann1, J. Robrade1,J.H.M.M.Schmitt1,F.Favata2,S.L.Baliunas3, and J. C. Hall4 1 Universität Hamburg, Hamburger Sternwarte, Gojenbergsweg 112, 21029 Hamburg, Germany e-mail: [email protected] 2 Astrophysics Division – Research and Science Support Department of ESA, ESTEC, Postbus 299, 2200 AG Noordwijk, The Netherlands 3 Harvard-Smithsonian Center for Astrophysics, Cambridge, MA, USA 4 Lowell Observatory, 1400 West Mars Hill Road, Flagstaff, AZ 86001, USA Received 19 April 2006 / Accepted 25 July 2006 ABSTRACT Context. While the existence of stellar analogues of the 11 years solar activity cycle is proven for dozens of stars from optical observations of chromospheric activity, the observation of clearly cyclical coronal activity is still in its infancy. Aims. In this paper, long-term X-ray monitoring of the binary 61 Cygni is used to investigate possible coronal activity cycles in moderately active stars. Methods. We are monitoring both stellar components, a K5V (A) and a K7V (B) star, of 61 Cyg with XMM-Newton. The first four years of these observations are combined with ROSAT HRI observations of an earlier monitoring campaign. The X-ray light curves are compared with the long-term monitoring of chromospheric activity, as measured by the Mt.Wilson CaII H+K S -index. Results. Besides the observation of variability on short time scales, long-term variations of the X-ray activity are clearly present. For 61 Cyg A we find a coronal cycle which clearly reflects the well-known and distinct chromospheric activity cycle. -

Milan Dimitrijevic Avgust.Qxd
1. M. Platiša, M. Popović, M. Dimitrijević, N. Konjević: 1975, Z. Fur Natur- forsch. 30a, 212 [A 1].* 1. Griem, H. R.: 1975, Stark Broadening, Adv. Atom. Molec. Phys. 11, 331. 2. Platiša, M., Popović, M. V., Konjević, N.: 1975, Stark broadening of O II and O III lines, Astron. Astrophys. 45, 325. 3. Konjević, N., Wiese, W. L.: 1976, Experimental Stark widths and shifts for non-hydrogenic spectral lines of ionized atoms, J. Phys. Chem. Ref. Data 5, 259. 4. Hey, J. D.: 1977, On the Stark broadening of isolated lines of F (II) and Cl (III) by plasmas, JQSRT 18, 649. 5. Hey, J. D.: 1977, Estimates of Stark broadening of some Ar III and Ar IV lines, JQSRT 17, 729. 6. Hey, J. D.: Breger, P.: 1980, Stark broadening of isolated lines emitted by singly - ionized tin, JQSRT 23, 311. 7. Hey, J. D.: Breger, P.: 1981, Stark broadening of isolated ion lines by plas- mas: Application of theory, in Spectral Line Shapes I, ed. B. Wende, W. de Gruyter, 201. 8. Сыркин, М. И.: 1981, Расчеты электронного уширения спектральных линий в теории оптических свойств плазмы, Опт. Спектроск. 51, 778. 9. Wiese, W. L., Konjević, N.: 1982, Regularities and similarities in plasma broadened spectral line widths (Stark widths), JQSRT 28, 185. 10. Konjević, N., Pittman, T. P.: 1986, Stark broadening of spectral lines of ho- mologous, doubly ionized inert gases, JQSRT 35, 473. 11. Konjević, N., Pittman, T. P.: 1987, Stark broadening of spectral lines of ho- mologous, doubly - ionized inert gases, JQSRT 37, 311. 12. Бабин, С. -

The HR Diagram
Name_______________________ Class_______________________ Date_______________________ Assignment #10 – The H-R Diagram A star is a delicately balanced ball of gas, fighting between two impulses: gravity, which wants to squeeze the gas all down to a single point, and radiation pressure, which wants to blast all the gas out to infinity. These two opposite forces balance out in a process called Hydrostatic Equilibrium, and keep the gas at a stable, fairly constant size. The radiation itself is due to the fusion of protons in the star's core – a process that produces huge amounts of energy. In class we've examined the most important properties of stars: their temperatures, colors and brightnesses. Now let's see if we can find some relationships between these stellar properties. We know that hotter stars are brighter, as described by the Stefan-Boltzmann Law, and we know that the hotter stars are also bluer, as described by Wien's Law. The H-R diagram is a way of displaying an important relationship between a star's Absolute Magnitude (or Luminosity), and its Spectral Type (or temperature). Remember, Absolute Magnitude is how bright a star would appear to be, if it were 10 parsecs away. Luminosity is how much total energy a star gives off per second. As we studied in a previous exercise, Spectral Type is a system of classifying stars by temperature, from hottest (type O) to coldest (type M). Each letter in the Spectral Type list (O, B, A, F, G, K, and M) is further subdivided into 10 steps, numbered 0 through 9, to make finer distinctions between stars. -

Open Access Proceedings Journal of Physics: Conference Series
Journal of Physics: Conference Series PAPER • OPEN ACCESS Related content - Fabrication of Diamond-Glass Composite Micro-gravity measurements during the total solar under Micro-Gravity Tatsuo Noma and Akira Sawaoka eclipse of 9 March 2016 in Indonesia - Magnetic compensation of the gravity by using superconducting axisymmetric coils: spherical harmonics method To cite this article: Agus Laesanpura et al 2016 J. Phys.: Conf. Ser. 771 012003 C Lorin and A Mailfert - Groundwater storage change detection using micro-gravimetric technology Mohammed El-Diasty View the article online for updates and enhancements. This content was downloaded from IP address 167.205.22.105 on 18/01/2018 at 01:59 International Symposium on Sun, Earth, and Life (ISSEL) IOP Publishing Journal of Physics: Conference Series 771 (2016) 012003 doi:10.1088/1742-6596/771/1/012003 Micro-gravity measurements during the total solar eclipse of 9 March 2016 in Indonesia Agus Laesanpura1, Taufiq Hidayat 2, Dady Abdurachman1, Putra Mahasena2, Premana W. Premadi 2, Hesti Wulandari2, Yudi Suharyadi3, Achmad Sjarmidi4 1Geophysic Engineering Study Program, ITB 2Bosscha Observatory and Astronomy Research Division, FMIPA, ITB 3Analysis Research Division, FMIPA, ITB 4School of Life Sciences and Technology, ITB E-mail: [email protected] Abstract. Since 1950s, several authors have reported the so-called anomalous gravity during the total solar eclipses through various experiments. To address this issue, in the moment of the total solar eclipse of 9 March 2016 passing most regions in Indonesia, we undertook microgravity measurements using two precise gravimeters. The measurements were made at two locations: (1) Poso (central Sulawesi), a location close to the centre passage of the total eclipse and (2) Lembang (West Java), the site of Bosscha Observatory, where the partial solar eclipse occurred.