Introduction to Nonlinear Geometric Pdes
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Universität Regensburg Mathematik
UniversitÄatRegensburg Mathematik Parametric Approximation of Surface Clusters driven by Isotropic and Anisotropic Surface Energies J.W. Barrett, H. Garcke, R. NÄurnberg Preprint Nr. 04/2009 Parametric Approximation of Surface Clusters driven by Isotropic and Anisotropic Surface Energies John W. Barrett† Harald Garcke‡ Robert N¨urnberg† Abstract We present a variational formulation for the evolution of surface clusters in R3 by mean curvature flow, surface diffusion and their anisotropic variants. We intro- duce the triple junction line conditions that are induced by the considered gradient flows, and present weak formulations of these flows. In addition, we consider the case where a subset of the boundaries of these clusters are constrained to lie on an external boundary. These formulations lead to unconditionally stable, fully dis- crete, parametric finite element approximations. The resulting schemes have very good properties with respect to the distribution of mesh points and, if applicable, volume conservation. This is demonstrated by several numerical experiments, in- cluding isotropic double, triple and quadruple bubbles, as well as clusters evolving under anisotropic mean curvature flow and anisotropic surface diffusion, including for regularized crystalline surface energy densities. Key words. surface clusters, mean curvature flow, surface diffusion, soap bubbles, triple junction lines, parametric finite elements, anisotropy, tangential movement AMS subject classifications. 65M60, 65M12, 35K55, 53C44, 74E10, 74E15 1 Introduction Equilibrium soap bubble clusters are stationary solutions of the variational problem in which one seeks a least area way to enclose and separate a number of regions with pre- scribed volumes. The relevant energy in this case is given as the sum of the total surface area. -
Cannonballs and Honeycombs, Volume 47, Number 4
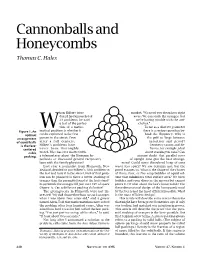
fea-hales.qxp 2/11/00 11:35 AM Page 440 Cannonballs and Honeycombs Thomas C. Hales hen Hilbert intro- market. “We need you down here right duced his famous list of away. We can stack the oranges, but 23 problems, he said we’re having trouble with the arti- a test of the perfec- chokes.” Wtion of a mathe- To me as a discrete geometer Figure 1. An matical problem is whether it there is a serious question be- optimal can be explained to the first hind the flippancy. Why is arrangement person in the street. Even the gulf so large between of equal balls after a full century, intuition and proof? is the face- Hilbert’s problems have Geometry taunts and de- centered never been thoroughly fies us. For example, what cubic tested. Who has ever chatted with about stacking tin cans? Can packing. a telemarketer about the Riemann hy- anyone doubt that parallel rows pothesis or discussed general reciprocity of upright cans give the best arrange- laws with the family physician? ment? Could some disordered heap of cans Last year a journalist from Plymouth, New waste less space? We say certainly not, but the Zealand, decided to put Hilbert’s 18th problem to proof escapes us. What is the shape of the cluster the test and took it to the street. Part of that prob- of three, four, or five soap bubbles of equal vol- lem can be phrased: Is there a better stacking of ume that minimizes total surface area? We blow oranges than the pyramids found at the fruit stand? bubbles and soon discover the answer but cannot In pyramids the oranges fill just over 74% of space prove it. -

1875–2012 Dr. Jan E. Wynn
HISTORY OF THE DEPARTMENT OF MATHEMATICS BRIGHAM YOUNG UNIVERSITY 1875–2012 DR. LYNN E. GARNER DR. GURCHARAN S. GILL DR. JAN E. WYNN Copyright © 2013, Department of Mathematics, Brigham Young University All rights reserved 2 Foreword In August 2012, the leadership of the Department of Mathematics of Brigham Young University requested the authors to compose a history of the department. The history that we had all heard was that the department had come into being in 1954, formed from the Physics Department, and with a physicist as the first chairman. This turned out to be partially true, in that the Department of Mathematics had been chaired by physicists until 1958, but it was referred to in the University Catalog as a department as early as 1904 and the first chairman was appointed in 1906. The authors were also part of the history of the department as professors of mathematics: Gurcharan S. Gill 1960–1999 Lynn E. Garner 1963–2007 Jan E. Wynn 1966–2000 Dr. Gill (1956–1958) and Dr. Garner (1960–1962) were also students in the department and hold B. S. degrees in Mathematics from BYU. We decided to address the history of the department by dividing it into three eras of quite different characteristics. The first era (1875–1978): Early development of the department as an entity, focusing on rapid growth during the administration of Kenneth L. Hillam as chairman. The second era (1978–1990): Efforts to bring the department in line with national standards in the mathematics community and to establish research capabilities, during the administration of Peter L. -

THE GEOMETRY of BUBBLES and FOAMS University of Illinois Department of Mathematics Urbana, IL, USA 61801-2975 Abstract. We Consi
THE GEOMETRY OF BUBBLES AND FOAMS JOHN M. SULLIVAN University of Illinois Department of Mathematics Urbana, IL, USA 61801-2975 Abstract. We consider mathematical models of bubbles, foams and froths, as collections of surfaces which minimize area under volume constraints. The resulting surfaces have constant mean curvature and an invariant notion of equilibrium forces. The possible singularities are described by Plateau's rules; this means that combinatorially a foam is dual to some triangulation of space. We examine certain restrictions on the combina- torics of triangulations and some useful ways to construct triangulations. Finally, we examine particular structures, like the family of tetrahedrally close-packed structures. These include the one used by Weaire and Phelan in their counterexample to the Kelvin conjecture, and they all seem useful for generating good equal-volume foams. 1. Introduction This survey records, and expands on, the material presented in the author's series of two lectures on \The Mathematics of Soap Films" at the NATO School on Foams (Cargese, May 1997). The first lecture discussed the dif- ferential geometry of constant mean curvature surfaces, while the second covered the combinatorics of foams. Soap films, bubble clusters, and foams and froths can be modeled math- ematically as collections of surfaces which minimize their surface area sub- ject to volume constraints. Each surface in such a solution has constant mean curvature, and is thus called a cmc surface. In Section 2 we examine a more general class of variational problems for surfaces, and then concen- trate on cmc surfaces. Section 3 describes the balancing of forces within a cmc surface. -
Kepler's Conjecture
KEPLER’S CONJECTURE How Some of the Greatest Minds in History Helped Solve One of the Oldest Math Problems in the World George G. Szpiro John Wiley & Sons, Inc. KEPLER’S CONJECTURE How Some of the Greatest Minds in History Helped Solve One of the Oldest Math Problems in the World George G. Szpiro John Wiley & Sons, Inc. This book is printed on acid-free paper.●∞ Copyright © 2003 by George G. Szpiro. All rights reserved Published by John Wiley & Sons, Inc., Hoboken, New Jersey Published simultaneously in Canada Illustrations on pp. 4, 5, 8, 9, 23, 25, 31, 32, 34, 45, 47, 50, 56, 60, 61, 62, 66, 68, 69, 73, 74, 75, 81, 85, 86, 109, 121, 122, 127, 130, 133, 135, 138, 143, 146, 147, 153, 160, 164, 165, 168, 171, 172, 173, 187, 188, 218, 220, 222, 225, 226, 228, 230, 235, 236, 238, 239, 244, 245, 246, 247, 249, 250, 251, 253, 258, 259, 261, 264, 266, 268, 269, 274, copyright © 2003 by Itay Almog. All rights reserved Photos pp. 12, 37, 54, 77, 100, 115 © Nidersächsische Staats- und Universitätsbib- liothek, Göttingen; p. 52 © Department of Mathematics, University of Oslo; p. 92 © AT&T Labs; p. 224 © Denis Weaire No part of this publication may be reproduced, stored in a retrieval system, or trans- mitted in any form or by any means, electronic, mechanical, photocopying, record- ing, scanning, or otherwise, except as permitted under Section 107 or 108 of the 1976 United States Copyright Act, without either the prior written permission of the Publisher, or authorization through payment of the appropriate per-copy fee to the Copyright Clearance Center, 222 Rosewood Drive, Danvers, MA 01923, (978) 750-8400, fax (978) 750-4470, or on the web at www.copyright.com. -

Full Text (PDF Format)
EXISTENCE AND UNIQUENESS OF STANDARD BUBBLE CLUSTERS OF GIVEN VOLUMES IN E^* A. MONTESINOS AMILIBIAt Abstract. We prove the existence of a unique standard fc-bubble in Mn, k < n +1, that encloses fixed volumes. 1. Introduction. A conjecture of much recent interest [SM, Prob. 2] says that a standard soap bubble cluster consisting of spherical surfaces meeting in threes at 120 degrees provides the least-perimeter way to enclose and separate k regions of prescribed volume in Rn for k < n + 1. Here we provide proofs of the existence and uniqueness of such a standard soap bubble. FIG. 1. Standard 3-bubble in ] Progress on the conjecture. As for the conjecture itself, the case k = 1 is the classical theorem that the round sphere provides the least-perimeter way to enclose given volumes in Mn. The case k = 2 is the Double Bubble Conjecture, proved in M2 in 1990 by a group of undergraduates [F2] and in M3 in 1995 for the case of equal volumes with the help of a computer by Hass, Hutchings, and Schlafly [HHS]. See [Ml]. The case k = 3, the Triple Bubble Conjecture, was proved for connected regions in E2 in 1992 by another group of undergraduates (including Hutchings) [C]. General results on the existence and regularity of minimizers are due to Almgren and Taylor ([A], [T], [AT]), Morgan [M2], and Hutchings [H, 2.6, 2.9, 5.1]. * Received June 19, 1999; accepted for publication August 31, 1999. "•"Departamento de Geometria y Topologfa, Universidad de Valencia, Dr. Moliner 50, 46100 Bur- jasot (Valencia), Spain ([email protected]). -

Least Perimeter Partition of the Disc Into N Bubbles of Two Different Areas
Eur. Phys. J. E (2019) 42:92 THE EUROPEAN DOI 10.1140/epje/i2019-11857-0 PHYSICAL JOURNAL E Regular Article Least perimeter partition of the disc into N bubbles of two different areas Francis Headley and Simon Coxa Department of Mathematics, Aberystwyth University, Aberystwyth, SY23 3BZ, UK Received 4 April 2019 and Received in final form 11 June 2019 Published online: 19 July 2019 c The Author(s) 2019. This article is published with open access at Springerlink.com Abstract. We present conjectured candidates for the least perimeter partition of a disc into N ≤ 10 connected regions which take one of two possible areas. We assume that the optimal partition is connected and enumerate all three-connected simple cubic graphs for each N. Candidate structures are obtained by assigning different areas to the regions: for even N there are N/2 bubbles of one area and N/2 bubbles of the other, and for odd N we consider both cases, i.e. in which the extra bubble takes either the larger or the smaller area. The perimeter of each candidate structure is found numerically for a few representative area ratios, and then the data is interpolated to give the conjectured least perimeter candidate for all possible area ratios. For each N we determine the ranges of area ratio for which each least perimeter candidate is optimal; at larger N these ranges are smaller, and there are more transitions from one optimal structure to another as the area ratio is varied. When the area ratio is significantly far from one, the least perimeter partitions tend to have a “mixed” configuration, in which bubbles of the same area are not adjacent to each other. -
![Arxiv:1805.10203V3 [Math.FA] 9 Jul 2021 Likely to Change Due to Independent, Uniformly Random Changes to the Votes](https://docslib.b-cdn.net/cover/5502/arxiv-1805-10203v3-math-fa-9-jul-2021-likely-to-change-due-to-independent-uniformly-random-changes-to-the-votes-4855502.webp)
Arxiv:1805.10203V3 [Math.FA] 9 Jul 2021 Likely to Change Due to Independent, Uniformly Random Changes to the Votes
THE STRUCTURE OF GAUSSIAN MINIMAL BUBBLES STEVEN HEILMAN Abstract. It is shown that m disjoint sets with fixed Gaussian volumes that partition Rn with minimum Gaussian surface area must be (m − 1)-dimensional. This follows from a second variation argument using infinitesimal translations. The special case m = 3 proves the Double Bubble problem for the Gaussian measure, with an extra technical assumption. That is, when m = 3, the three minimal sets are adjacent 120 degree sectors. The technical assumption is that the triple junction points of the minimizing sets have polynomial volume growth. Assuming again the technical assumption, we prove the m = 4 Triple Bubble Conjecture for the Gaussian measure. Our methods combine the Colding-Minicozzi theory of Gaussian minimal surfaces with some arguments used in the Hutchings-Morgan-Ritor´e- Ros proof of the Euclidean Double Bubble Conjecture. 1. Introduction Classical isoperimetric theory asks for the minimum total Euclidean surface area of m disjoint volumes in Rn+1. The case m = 1 results in the Euclidean ball. That is, a Euclidean ball has the smallest Euclidean surface area among all (measurable) sets of fixed Lebesgue measure. The case m = 2 is the Double Bubble Problem, solved in [HMRR02, Rei08]. The case m ≥ 3 is still open, except for the special case m = 3; n + 1 = 2 [Wic04]. As Hutchings writes on his website1 concerning the m = 3; n + 1 = 3 case, \The triple bubble problem in R3 currently seems hopeless without some brilliant new idea." Recent results in theoretical computer science, such as sharp hardness for the MAX-m- CUT problem [KKMO07, IM12] motivate the above isoperimetric problem with Lebesgue measure replaced with the Gaussian measure [IM12]. -
Proof of the Double Bubble Conjecture in R^ N
PROOF OF THE DOUBLE BUBBLE CONJECTURE IN Rn BEN W. REICHARDT Abstract. The least-area hypersurface enclosing and separating two given volumes in Rn is the standard double bubble. 1. Introduction 1.1. The Double Bubble Conjecture. We extend the proof of the double bubble theorem [HMRR02] from R3 to Rn. Theorem 1.1 (Double Bubble Conjecture). The least-area hypersurface enclos- ing and separating two given volumes in Rn is the standard double soap bubble of Figure 1, consisting of three (n − 1)-dimensional spherical caps intersecting at 120 degree angles. (For the case of equal volumes, the middle cap is a flat disk.) In 1990, Foisy, Alfaro, Brock, Hodges and Zimba [FAB+93] proved the Double Bubble Conjecture in R2. In 1995, Hass, Hutchings and Schlafly [HHS95, HS00] used a computer to prove the conjecture for the case of equal volumes in R3. Arguments since have relied on the Hutchings structure theorem (Theorem 3.1), stating roughly that the only possible nonstandard minimal double bubbles are ro- tationally symmetric about an axis and consist of “trees” of annular bands wrapped around each other [Hut97]. Figures 2 and 3 show examples of “4+4” bubbles, in which the region for each volume is divided into four connected components. In 2000, Hutchings, Morgan, Ritor´eand Ros [HMRR02] used stability arguments to prove the conjecture for all cases in R3. For R3, component bounds after Hutch- ings [Hut97] guarantee that the region enclosing the larger volume is connected and the region enclosing the smaller volume has at most two components. (For equal volumes, both regions need be connected.) Eliminating “1 + 2” and “1 + 1” non- standard bubbles proved the conjecture in R3. -

Standard Simplices and Pluralities Are Not the Most Noise Stable
STANDARD SIMPLICES AND PLURALITIES ARE NOT THE MOST NOISE STABLE STEVEN HEILMAN, ELCHANAN MOSSEL, AND JOE NEEMAN Abstract. The Standard Simplex Conjecture and the Plurality is Stablest Conjecture are two conjectures stating that certain partitions are optimal with respect to Gaussian and discrete noise stability respectively. These two conjectures are natural generalizations of the Gaussian noise stability result by Borell (1985) and the Majority is Stablest Theorem (2004). Here we show that the standard simplex is not the most stable partition in Gaussian space and that Plurality is not the most stable low influence partition in discrete space for every number of parts k ≥ 3, for every value ρ 6= 0 of the noise and for every prescribed measures for the different parts as long as they are not all equal to 1=k. Our results do not contradict the original statements of the Plurality is Stablest and Standard Simplex Conjectures in their original statements concerning partitions to sets of equal measure. However, they indicate that if these conjectures are true, their veracity and their proofs will crucially rely on assuming that the sets are of equal measures, in stark contrast to Borell's result, the Majority is Stablest Theorem and many other results in isoperimetric theory. Given our results it is natural to ask for (conjectured) partitions achieving the optimum noise stability. 1. Introduction Noise stability is a natural concept which appears in the study of Gaussian processes, voting, percolation and theoretical computer science. The study of partitions of the space which are optimal with respect to noise stability may be viewed as a natural extension of isoperimetric theory; see e.g. -

MAA Election Results Math Education Programs That Work
THE NEWSLETTER OF THE MATHEMA TICAL ASSOCIATION OF AMERICA MAA Election Results Gerald L. Alexanderson of Santa Clara Uni on Minorities in Math Volume 15, Number 6 versity has been elected the next president of ematics, the report of the MAA, following the term of Kenneth A. which led to the forming Ross. Alexanderson will serve a one-year term of the SUMMA office at In this Issue as president-elect beginning in January 1996, MAA headquarters. She and will take over as president a year later, to has done research in the 5 Project NExT serve a term of two years. area of wavelets and mul Fellows tivariate splines, in addi On the same ballot, the members of the Asso tion to being involved at Gerald L. Alexanderson ciation elected Louise Raphael of Howard Uni the NSF as the first pro 6 The Double versity and Wade Ellis, Jr. of West Valley gram director of the Cal Bubble Conjecture College as first and second vice-president, re culus Curriculum Init spectively. Both will serve two-year terms iative. beginning January 1996. 12 A Foundation Ellis has served on numer in High Gear Alexanderson served the Association as first ous committees of the vice-president in 1984-85, as editor of Math MAA, most notably chair ematics Magazine, 1986-90, and as secretary ingthe Committee on Two 14 1996 Joint from 1990 to the present. He has been a mem Year Colleges, and is a Louise Raphael Meetings ber of the Association for forty-one years and former member of the Update has served in various capacities on the Board Mathematical Sciences of Governors for a total of fourteen years. -

Bubbles and Tilings: Art and Mathematics
Proceedings of Bridges 2014: Mathematics, Music, Art, Architecture, Culture Bubbles and Tilings: Art and Mathematics Frank Morgan Department of Mathematics and Statistics, Williams College Williamstown, MA 01267 [email protected] Abstract The 2002 proof of the Double Bubble Conjecture on the ideal shape for a double soap bubble depended for its ideas and explanation on beautiful images of the multitudinous possibilities. Similarly recent results on ideal tilings depend on the artwork. Bubbles I'm a geometer. To do mathematics, I have to have a picture in mind. For example, I like to picture soap bubbles. Soap bubbles are round, beautifully round, a perfect shape, as in Figure 1a. This round shape is the optimal, least-energy, least-area way to enclose a given volume of air, as was proved mathematically by Schwarz in 1884. A perfect mathematical sphere, as rendered in Figure 1b by John M. Sullivan, enhanced by simulated lighting, makes for the perfect soap bubble. Figure 1: Soap bubbles are beautifully round. a. 4freephotos.com; b. John M. Sullivan, used by permission, all rights reserved When two soap bubbles come together, they form the familiar double bubble shape of Figure 2. Figure 2: The double bubble. sxc.hu 11 Morgan Question: is this standard double bubble the optimal, least-area way to enclose and separate two given volumes of air? A 1990 undergraduate thesis by Joel Foisy stated this conjecture. Double Bubble Conjecture: The standard double bubble is the least-area way to enclose and separate two given volumes of air. On the other hand, might something completely different do better? What are some other possibilities? Two separate bubbles as in Figure 3 are less efficient, because when they come together they can share the common wall.