Development of the Arizona Robotic Telescope Network
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Campus Building & Department Index- Alphabetical
CAMPUS BUILDING & DEPARTMENT INDEX- ALPHABETICAL 2009-2010 A --- Electrical & Computer Nuerology Clinic 522 (F1) Adminstration 66 (D5) Engineering Bldg. 104 (C4) Nugent, Robert L. 40 (C6) Admissions, Office of 40 (C6) Engineering & Mines, College of 72 (C4) Nursing, College of 203 (F2) African American Studies 128 (D4) Engineering Building 20 (C5) O --- Agricultural Sciences 38 (C6) Dennis DeConcini Environment Old Main Building 21 (C5) Agriculture, College of 36 (C6) & Natural Resources Bldg. 120 (B7) Optical Science(Meinel) 94 (F6) A.M.E. Building 119 (D3) Extended University 158 (A5) P --- Apache Hall 50A (D7) F --- Park Ave. Parking Garage 116 (B3) Architecture, College of 75 (C4) Facilities Mgmt., AHSC 206 (E1) Park Student Center 87 (A6) Art Annex, Ceramics 470 (C3) Facilities Mgmt., Annex 460 (E1) Parking and Transportation Services 181 (C7) AZ Coop. Wildlife & Fishery Facilities Mgmt., Renovation 470 (D3) Payroll Department 158 (A5) Research Unit 43 (D6) Facilities Mgmt. Warehouse 215 (E1) Pharmacy, College of 207 (F2) Arizona Hall 84 (A7) Faculty Office Building 220 (E1) PHASE 420 (B3) Arizona Health Sciences Ctr. 201 (F2) Faculty Senate Office 456 (C2) Physics & Atmospheric Science (PAS) 81 (C6) Basic Services 201 (F2) Family & Consumer Res. 33 (B6) Pima Hall 135 (D4) Biomed. Research Lab 209 (E1) Family Practice Unit, AHSC 204 (E2) Pinal Hall 59 (E7) Bookstore 201 (F2) Fine Arts, Faculty of 4 (B4) Plantarium, Flandrau 91 (E5) Cancer Center 222 (F2) Fluid Dynamics Res. Lab 112 (C4) Planetary Sci., Dept. of 92 (E5) Central Heat/Refrig. 205 (E2) Forbes (Agriculture) 36 (C6) Police Department 100 (F4) Cl. Sci. -

Highly Sampled Measurements in a Controlled Atmosphere at the Biosphere 2 Landscape Evolution Observatory
www.nature.com/scientificdata OpEN Highly sampled measurements Data DEscRiptor in a controlled atmosphere at the Biosphere 2 Landscape Evolution Observatory Jorge Arevalo 1,2 ✉ , Xubin Zeng 1,3, Matej Durcik3, Michael Sibayan4, Luke Pangle5, Nate Abramson6, Aaron Bugaj3, Wei-Ren Ng3, Minseok Kim3, Greg Barron-Gaford 3,7, Joost van Haren3,8,9, Guo-Yue Niu 1,3, John Adams3, Joaquin Ruiz3,6 & Peter A. Troch1,3 Land-atmosphere interactions at diferent temporal and spatial scales are important for our understanding of the Earth system and its modeling. The Landscape Evolution Observatory (LEO) at Biosphere 2, managed by the University of Arizona, hosts three nearly identical artifcial bare-soil hillslopes with dimensions of 11 × 30 m2 (1 m depth) in a controlled and highly monitored environment within three large greenhouses. These facilities provide a unique opportunity to explore these interactions. The dataset presented here is a subset of the measurements in each LEO’s hillslopes, from 1 July 2015 to 30 June 2019 every 15 minutes, consisting of temperature, water content and heat fux of the soil (at 5 cm depth) for 12 co-located points; temperature, relative humidity and wind speed above ground at 5 locations and 5 diferent heights ranging from 0.25 m to 9–10 m; 3D wind at 1 location; the four components of radiation at 2 locations; spatially aggregated precipitation rates, total subsurface discharge, and relative water storage; and the measurements from a weather station outside the greenhouses. Background & Summary Te understanding of land-atmosphere interactions is important for improvements in Earth System Modelling1–3 for climate assessment, weather prediction, and subseasonal-to-seasonal forecasts4. -

(Most Recent Update, March 16, 2020, 6 Pm) Stewa
Steward/Astronomy Specific Guidelines for Responding/Adapting to C19 Pandemic (Most Recent Update, March 16, 2020, 6 p.m.) Steward Observatory and the Department of Astronomy are adopting policies that will minimize the risk of transmission of COVID-19 while allowing us to continue to support our educational, outreach, and research missions. Facts and information are being shared with us at a high rate -- and these policies will have to evolve with time. We appreciate your patience and attention to the information below. We have tried to identify by subsection the individuals to whom you should address questions, but please always start with your supervisor/advisor. Our policies are intended to be consistent with those of the University of Arizona and the College of Science. We refer you to their web pages at these links: https://www.arizona.edu/coronavirus-covid-19-information and https://science.arizona.edu/coronavirus This is an evolving situation. We will update this document based on Federal, State and University policies as they become available. Please check the Provost and College pages at least daily, as they are also being updated frequently. Effective Immediately -- These policies are effective March 16, 2020 and will be updated as needed to stay consistent with U Arizona and College of Science Policies Courses and Classes (undergraduate and graduate) - All courses will be 100% online for the remaining of the semester. If you are an instructor and are having trouble moving your course to on-line, please contact Associate Department Head Xiaohui Fan, who will help you find assistance. - No in-person component to any classes. -

LSST Jan2005 3Page.Indd
EMBARGOED FOR RELEASE: 12:30 p.m. PST, January 11, 2005 RELEASE: LSSTC-02 Steward Observatory Mirror Lab Awarded Contract for Large Synoptic Survey Telescope Mirror The LSST Corporation has awarded a $2.3 million contract to the University of Arizona Steward Observatory Mirror Lab to purchase the glass and begin engineering work for the 8.4-meter diameter main mirror for the Large Synoptic Survey Telescope (LSST). This award was announced today in San Diego at the 205th meeting of the American Astronomical Society. Acquiring the LSST primary mirror was made possible by a generous, private donation from Arizona businessman Richard Caris. The UA award covers the first of four phases in an estimated $13.8 million effort to design, cast, polish and integrate the mirror into the LSST mirror support cell. Coupled with substantial support provided by Research Corporation under the leadership of John Schaefer, these private funds boost the LSST off the drawing board and into production. The LSST is a proposed world-class, ground-based telescope that can survey the entire visible sky every three nights. It will generate an awesome 30 terabytes of data per night from a three billion-pixel digital camera, producing a vast database of information on the universe. LSST will take exposures every 10 seconds, opening a movie-like window on objects that change or move on rapid timescales -- exploding supernovae, Earth-approaching asteroids, and The contract for casting of the 8.4-meter primary mirror of the distant Kuiper belt objects. Via the light-bending gravity of dark matter, LSST Large Synoptic Survey Telescope by the University of Arizona will chart the history of the expansion of the universe, yielding a unique probe (UA) Mirror Lab is signed by (L-R) Dr. -

The Southern Arizona Region
This report was prepared for the Southern Arizona’s Regional Steering Committee as an input to the OECD Review of Higher Education in Regional and City Development. It was prepared in response to guidelines provided by the OECD to all participating regions. The guidelines encouraged constructive and critical evaluation of the policies, practices and strategies in HEIs’ regional engagement. The opinions expressed are not necessarily those of the Regional Steering Committee, the OECD or its Member countries. 2 TABLE OF CONTENTS ACKNOWLEDGEMENTS............................................................................................................. iii ACRONYMS..................................................................................................................................... v LIST OF FIGURES, TABLES AND APPENDICES....................................................... ………. vii EXECUTIVE SUMMARY.............................................................................................................. ix CHAPTER 1. OVERVIEW OF THE SOUTHERN ARIZONA REGION................................. 1 1.1 Introduction…………………………………………………………………............................... 1 1.2 The geographical situation............................................................................................................ 1 1.3 History of Southern Arizona…………………………….………………………….................... 3 1.4 The demographic situation………………………………………………………………............ 3 1.5 The regional economy………………………………………………………………………...... 14 1.6 Governance.................................................................................................................................. -

Physical Space Inventory Fall, 2015 Annual Report
Planning, Design& Construction Space Management Physical Space Inventory Cover page photo credit: Bill Timmerman-Timmerman Photography http://www.billtimmerman.com/ Contact Information for the University of Arizona: Web Site: http://www.arizona.edu/ Planning, Design & Construction Space Management 220 W. 6th St. USA Building, 3rd Floor Tucson, Arizona 85701-1014 http://www.pdc.arizona.edu/ Produced and Published by: Jorge L. Zepeda, Business Analyst, Space Management Physical Space Inventory Fall, 2015 OVERVIEW The University of Arizona experienced a net growth of 1,109,473 gross square feet (GSF)/ 639,075 net assignable square feet (NASF) during the course of fiscal year 2015. The fiscal year was an active year for the University’s real estate portfolio with the construction of new facilities, large scale renovations, the acquisition of off-campus properties; in addition to, the completion of the University of Arizona Health Network (UAHN) and Banner Health transaction. New facilities include the award-winning Environment and Natural Resource Phase 2 (207,632 GSF/ 91,519 NASF) and the Arizona Cancer Center Phoenix (227,579 GSF/ 133,878 NASF). The Environment and Natural Resources Phase 2 facility provides faculty offices, research/instructional dry laboratories/work spaces to further advance interdisciplinary research in earth, environmental, natural resources, math and related sciences. As well as, supplying a large classroom auditorium to meet the demands of an increasing student population. The Arizona Cancer Center Phoenix houses new medical and research facilities equipped with modern technology to provide the highest quality cancer research and comprehensive care to patients across the state and nation. The University also expanded throughout the surrounding communities to continue providing educational services/opportunities across the state with the acquisitions of The Al- Marah Horse Ranch (84,999 GSF/ 77,368 NASF), Southwest Center (11,070 GSF/ 7,835 NASF) and the Ames Learning Center (8,866 GSF/ 7,555 NASF) in Cochise and Pima Counties respectively. -

RECOMBINATION LINE VS. FORBIDDEN LINE ABUNDANCES in PLANETARY NEBULAE Steward Observatory, University of Arizona, 933 North Cher
RECOMBINATION LINE VS. FORBIDDEN LINE ABUNDANCES IN PLANETARY NEBULAE MARK ROBERTSON-TESSI Steward Observatory, University of Arizona, 933 North Cherry Avenue, Tucson, AZ 85721; [email protected] AND DONALD R. GARNETT Steward Observatory, University of Arizona, 933 North Cherry Avenue, Tucson, AZ 85721; [email protected] ABSTRACT Recombination lines (RLs) of C II, N II, and O II in planetary nebulae (PNs) have been found to give abundances that are much larger in some cases than abundances from collisionally-excited forbidden lines (CELs). The origins of this abundance discrepancy are highly debated. We present new spectroscopic observations of O II and C II recombination lines for six planetary nebulae. With these data we compare the abundances derived from the optical recombination lines with those determined from collisionally-excited lines. Combining our new data with published results on RLs in other PNs, we examine the discrepancy in abundances derived from RLs and CELs. We find that there is a wide range in the measured abundance discrepancy ∆(O+2) = log O+2(RL) - log O+2(CEL), ranging from approximately 0.1 dex (within the 1σ measurement errors) up to 1.4 dex. This tends to rule out errors in the recombination coefficients as a source of the discrepancy. Most RLs yield similar abundances, with the notable exception of O II multiplet V15, known to arise primarily from dielectronic recombination, which gives abundances averaging 0.6 dex higher than other O II RLs. We compare ∆(O+2) against a variety of physical properties of the PNs to look for clues 2 as to the mechanism responsible for the abundance discrepancy. -

Reflections on My Time in the Wolfe Den
Reflections on my time in the Wolfe den H. Philip Stahl ABSTRACT The three and a half years I spent as a member of the Infrared Group were transitional. Bill Wolfe was the nexus. Bill played a role in getting me to Arizona and keeping me there. He helped me advance professionally and taught me how to think like a systems engineer. He played a central role in my effort to earn a PhD. And, he helped start me in SPIE. This paper contains my personal and honest reflections on the impact which Bill Wolfe has had on me. Keywords: History 1. INTRODUCTION When Mary Turner asked me to give a Wolfe Tribute talk, my first reaction was no; and, so was my second reaction. My reasons were simple. I didn’t think I had anything to say. I have not followed in his footsteps. I long ago left the field of infrared and radiometry for optical testing and interferometry. I have not contributed any new knowledge or theories based on Bill’s work. I have not worked my entire career with him nor do I know him well enough to shed light on his character or share any humorous stories. I have had a modest career, I am not a chief scientist or a tenured professor or a business owner or a corporate officer. And, I’m not even sure if I am officially a Bill Wolfe student. While Bill was my employer and adviser for my first three and a half years at the Optical Sciences Center, Martin Tomasko of the Lunar and Planetary Laboratory was the Principal Investigator for my project and I got my Master’s degree by paying $10 after passing my PhD preliminary examination so that I could teach introductory physics a Pima Community College – because as a new father I needed to supplement my assistantship to pay the hospital bill which was not covered by the student health plan. -

Louis J. Scuderi: Curriculum Vitae
Louis J. Scuderi University of Hawaii at Manoa Phone: (505) 270-4756 Institute for Astronomy Email: [email protected] 2680 Woodlawn Drive Homepage: http://www.ifa.hawaii.edu/∼lscuderi Honolulu, HI, 96822 Education B.S. Astronomy and Physics. University of Arizona, Steward Observatory. August 2011. M.S. Astronomy. University of Hawaii at Manoa, Institute for Astronomy. December 2013. Professional Appointments 2011-present Graduate Research Assistant, IfA, U. Hawaii at Manoa 2010-2011 NASA Undergraduate Space Grant Intern, LPL, U. Arizona 2008-2011 Undergraduate Student Researcher, Steward Observatory, U. Arizona Research Interests Planetary occurrence rates, planetary atmospheres, and planet formation history including both Terrestrial and Jovian type planets. Publications Journal Articles L.J. Scuderi, J.A. Dittmann, J.R. Males, E.M. Green, L.M. Close, 2010, ApJ 714 462. On the Apparent Orbital Inclination Change of the Extrasolar Transiting Planet TrES-2b. arXiv URL: http://arxiv.org/abs/0907.1685 M.A. Kenworthy, L. J. Scuderi, 2012 ApJ 752 313. Infrared Variability of the Gliese 569B System. arXiv URL: http://arxiv.org/abs/1204.3454 E. Sinukoff, B. Fulton, L. Scuderi, E. Gaidos, 2013 Space Science Reviews Volume 180, Issue 1-4, pp. 71-99. Below One Earth: The Detection, Formation, and Properties of Subterrestrial World. arxiv URL: http://arxiv.org/abs/1308.6308 J.A. Ditmann, L.M. Close, E.M. Green, L.J. Scuderi, J.R. Males, 2009 ApJ 669 L48-L51. Follow-up Observations of HAT-P-11b. arXiv URL: http://arxiv.org/abs/0905.1114 J.A. Dittmann, L.M. Close, L.J. Scuderi, M.D. -

Rachel A. Smullen
Rachel A. Smullen [email protected] PhD Candidate lavinia.as.arizona.edu/~rsmullen Steward Observatory ë University of Arizona Citizenship: USA Education 2014–Present University of Arizona, PhD in Astronomy & Astrophysics Expected Graduation: Summer 2020/Expected Dissertation Award Date: August 2020 2014–2016 University of Arizona, MS in Astronomy 2010–2014 University of Wyoming, B.S. in Physics & B.S in Astronomy Minors in Mathematics, Computer Science, Interdisciplinary Computational Science Graduated summa cum laude; Member of Honors Program Selected Fellowships, Awards, and Honors 2019-2020 Jamieson Graduate Fellowship* 2017 Department of Astronomy Outstanding Scholarship Award 2017 P.E.O. Scholar Award* 2015-2019 National Science Foundation Graduate Research Fellowship* 2014 Department of Physics and Astronomy Outstanding Graduate, University of Wyoming 2014 College of Arts and Sciences Outstanding Graduate, University of Wyoming 2014 Rosemarie Martha Spitaleri Award for Outstanding Female Graduate Finalist, University of Wyoming 2011, 2012, 2013 Wyoming NASA Space Grant Consortium Undergraduate Research Fellowship* *Funded fellowships Publications As First Author Smullen, R. A., Kratter, K. M., Offner, S. S. R., Lee, A. T., & Chen, H. H., 2020 Under Review “The Highly Variable Time Evolution of Star-forming Cores Identified with Dendrograms” arXiv:2004.01263 Smullen, R. A. & Kratter, K. M., 2017, MNRAS, 466, 4480 “The Fate of Debris in the Pluto-Charon System” Smullen, R. A., Kratter, K. M., & Shannon, A. 2016, MNRAS, 461, 1288 “Planet Scattering Around Binaries: Ejections, Not Collisions” Smullen, R. A., Kobulnicky, H. A. 2015, ApJ, 808, 166 “Heartbeat Stars: Orbital Solutions for Eccentric Binary Systems” As Co-author Lee, A. T., Offner, S. -
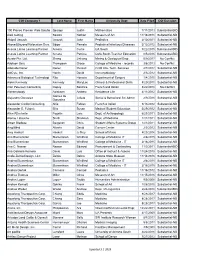
COI Company 1 Last Name First Name University Dept Date Filed COI Decision
COI Company 1 Last Name First Name University Dept Date Filed COI Decision 100 Pianos Premier Web Solutio Spargur Justin Mathematics 7/11/2013 Substantial-BID A&A Cutting Saxton Nathan Museum of Art 11/16/2015 Substantial-NB Abigail Jarczyk Jarczyk John Pediatrics 2/10/2011 Substantial-NB Above&Beyond Relocation Srvs. Edgar Pamela Pediatrics/Infectious Diseases 3/12/2012 Substantial-NB Acosta Latino Learning Partner Acosta Curtis UA South 7/22/2015 Substantial-BID Acosta Latino Learning Partner Acosta Patricia UofA South Teacher Education 8/5/2016 Substantial-BID Acrete Pte. Ltd. Zhang Jinhong Mining & Geological Engr. 5/9/2017 No Conflict Addison Geis Thompson Grace College of Medicine - records 3/6/2013 No Conflict Adelaide Doner Doner Russell COM Info. Tech. Services 2/7/2017 Substantial-NB AdiCyte, Inc. Harris David Immunobiology 2/3/2012 Substantial-NB Advanced Biological Technologi Rilo Horacio Department of Surgery 1/4/2010 Substantial-NB Aiden Kennedy Kennedy MaryLou Clinical & Professional Skills 8/20/2015 Substantial-NB Alan Petersen Consulting Dupuy Beatrice French and Italian 8/22/2010 No-Conflict Alchemybody Aslaksen Andrew Residence Life 4/11/2012 Substantial-NB Gomez de Alejandro Gonzelez Julieta Social & Behavioral Sci Admin 2/9/2016 Substantial-NB Gonzalez Alexander Carillo Consulting Alfie Fabian French & Italian 9/13/2012 Substantial-NB Alexander E. Fulginit Ellis Susan Medical Student Education 3/29/2012 Substantial-NB Alice Ritscherle Fogelin Lars Dept. of Anthropology 6/23/2011 Substantial-NB Alonso Latouche Smith Shannon Dept. of Medicine 12/1/2011 Substantial-NB Alwen Bledsoe Bergeron Chris Student Affairs Systems Group 12/1/2011 Substantial-NB AmpliMed Alberts David Cancer Center 2/3/2012 Substantial-NB Amy Haskell Haskell Jeffrey School of Music 8/23/2016 Substantial-NB Ana Blumenkron Blumenkron Winifred College of Medicine IT 2/6/2015 Substantial-NB Ana Blumenkron Blumenkron Winifred College of Medicine - IT 2/18/2015 Substantial-NB Ana C. -

Curriculum Vitae ALISON HAWTHORNE DEMING
Curriculum Vitae ALISON HAWTHORNE DEMING www.alisonhawthornedeming.com CHRONOLOGY OF EMPLOYMENT: 2017-present Regents Professor, Creative Writing Program, Department of English University Arizona 2014-2019 Agnese Nelms Haury Chair in Environment and Social Justice, University of Arizona 2012-2014 Director, Creative Writing Program, Department of English, University of Arizona 2003-2017 Professor, Creative Writing Program, Department of English, University of Arizona 2009-2010 Acting Head, Department of English, University of Arizona 2007 Acting Director, Creative Writing Program, University of Arizona, spring semester 1998-2003 Associate Professor, Creative Writing Program, Department of English, University of Arizona 1990-2000/ Director, University of Arizona Poetry Center 2001-2002 1997 Distinguished Visiting Writer, University of Hawai’i, Mānoa, HI, fall semester 1988-90 Coordinator, Fellowship Program, Fine Arts Work Center, Provincetown, MA 1983-87 Instructor, University of Southern Maine, Portland, ME 1984-85 Poetry Fellow, Fine Arts Work Center, Provincetown, MA CHRONOLOGY OF EDUCATION: 1987-88 Wallace Stegner Fellow: Stanford University 1983 M.F.A. in Writing, Vermont College of Fine Arts Thesis: Signs of Conviction, a poetry collection; thesis director, Mark Doty Critical Paper: “The Engaging Mask: A Study of Self and Other in Six Contemporary Poets” Undergraduate study at Trinity College, Brown University, Harvard University Extension, and Goddard College. BOOKS: The Excavations, poems, under review at Penguin, which published my last three poetry books A Woven World: On Fashion, Fishermen and the Sardine Dress, nonfiction, Counterpoint Press, forthcoming August 2021 (supported by a Fellowship from the John Simon Guggenheim Foundation) Stairway to Heaven, poetry, NY: Penguin, 2016, 101 pages Death Valley: Painted Light, photographs by Stephen Strom and poems by Alison Hawthorne Deming, Santa Fe: George F.