SUSK MQP Final 2016 2017.Pdf
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

T E L L T a L E S a R a T O G a L a K E S a I L I N G C L U B
What's Inside? T e l l t a l e S a r a t o g a L a k e S a i l i n g C l u b Web page: sailsaratoga.org May, 2016 Commodore’s Corner SLSC By Mark Welcome Annual Memorial Day It’s time to go sailing! Champagne Brunch The Club is in great shape and the docks are all in as of the Monday, May 30 April 30th work party. We had 120 memberships 10:00 AM - Noon represented at the first work party and were able to accomplish almost everything that was on our lists. Not to Adults $10 - Kids (12 and under) $5 worry, we have more than enough work to add to our lists th Champagne market price per bottle for Work Party #2 which will be on Saturday May 7 . Planned work details include getting the mooring field ready, Reservations no later than May 22 to more house cleaning, additional work on school boats and any number of projects on the grounds. We look forward to seeing many of you who couldn’t make the first work party at [email protected] the second work party so we can finish opening up the club Email reservations are preferred, and will be and start the sailing season off right. If you are unable to acknowledged! participate in the work parties, please contact John Smith, Melissa Tkal, Greg Tkal, JT Fahy, David Hudson or myself or call to see if they need help with additional projects. Given that Kathleen & Vic Roberts we are a volunteer run organization, there are always 399-4410 projects to do and we appreciate the help of all the members. -

Summer to Sailing Events in Michigan, Canada, the East Coast and Free Country
The WayfarerThe Wayfarer United StatesUnited Wayfarer States Wayfarer Association Association Spring 2012Fall-2 2012-3 COMMODORE COMMENTS the same results with my fellow racers, the Wayfarer Jim Heffernan, W1066, W2458 fleet would once again be strong. Ian Proctor had planned, when he designed the While cruising is thriving, the heart of the racing Wayfarer, that this 16 foot dinghy would be a multi- Wayfarer in North America just steadily beats on. It’s tasker. The articles in this issue show how strong the true our fleet does not have the numbers turning out as long distance and day cruising abilities of the Wayfarer it did in the ‘70s, ‘80s and early ‘90s. But the have remained after 55 years on waters worldwide. grumbles this year about numbers are not warranted. As a fleet, we are holding our own. In fact, our A recent news report from the UK, told how a 21 year numbers compared with 2011 are even or up a few old sailor, Ludo Bennett-Jones, completed a boats in some regattas. Scheduling in the U.S. seems to circumnavigation of the British Isles in 47 days in a be helping our numbers. A special thanks should be Wayfarer. What an adventure! While most of us given to Nick Seraphinoff and Jim Best for getting cannot do the epic journeys on water, we do optimize Wayfarers into the BOD in Detroit. the fine handling of the Wayfarer in many other ways. Ken Jensen in Norway regularly puts to sea in W 1348 OK, I know I said we are holding our own. -

T E L L T a L E S a R a T O G a L a K E S a I L I N G C L U B
What's Inside? T e l l t a l e S a r a t o g a L a k e S a i l i n g C l u b Web page: sailsaratoga.org November, 2019 Commodore’s Corner By Tony Cannone SLSC Notice of Annual Meeting I’d like to thank all of the many club members who came out on October 19th to prepare the club for the coming winter months. With the combined efforts of all attendees and cooperative Sunday, Dec 8th, 3:00pm weather, we completed the necessary tasks. I’d like to thank Lucy at Fahy for stepping in to prepare lunch for the 100+ members who Our Clubhouse stayed around for lunch. She was assisted by JT Fahy, Lauren Meyer, Charlotte Osborne, Margaret Shirk, Susan Cuda and . Jennifer DuBois. Annual Report given by each board member After Lunch of the work party, a special meeting was held to Election of the 2020 Executive Board discuss the 2019 budget modification needed to fund the Storage Barn. We finally received the approval needed from the US Army The Nominating Committee recommends Corp. of Engineers (ACE) and the NYS Department of the following candidates: Environmental Conservation (DEC). With the modifications to the plan and the time lapse, the board felt a special meeting was Commodore John Smith needed to get the approval from membership to move forward in this calendar year. We have a potential contractor available to Vice Commodore Scott Meyer complete the work by the end of the year at a pretty reasonable Rear Commodore David Hudson price compared to other recent estimates received. -

Pm-Mmmztmlineto COOLG Ansu.And CAPETOWN No
CALL, SUNDAY, THE SAN FBANCISCO FEBRUARY 31, 1897.. 29 Preferred : SO i Preferred 18V<i DRIED FRUITS, ItAIINS,NUTS, ETC. and 14, block 17, Oak --hade Tract, Alameda; $10. SHJ.PPl_\ii iNTELLItiAJifCE. Kingston APerm.. 3 Cnion Pacific 6"/8 Lake & 28 THE COMMERCIAL WORLD. Erie Westn 16 ID Den AG01f.... — DRIED FRUITS—Quotations on the Fruit Ex- Builders' Contracts. ' Preferred 68 Ufocordage.. —— change are nominally as follows: ArriveI. lake Shore I Mrs. Peck, OF THE MARKETS. 166 Preferred Carload Lots—, pricots are Isaac Ht-cbt with Miller & excavat- SATURDAY. February 20. Shippers -SUMMARY quotsb'e at and Pr'cea. National Lead 2.1 ing, etc., line on NE Closing Guaranteed and 11 6S9c crading. for a two-siory bull Stmr Progreso, S7 from Preferred 91 8 Express 35 for itovals Va&l-c tor choice to lancy corner of Jackson and streets: $4950. Storrs. hours Seattle: • • WHFAT-February, May, 76Vfc@"8^°! If Moorpi-.rgs Prunes. for 4 six-s; <>ciavi« 2roo tons coat, to P B Cornwall. Coffee en#ra:iy lower. .111 75Vs". long Islam 46 ie b Leather. '*/» 2-*j-4@Sc the .-a me witb C. ibisholm. carpenter work, etc.. on unchanged. " v.73?fc. Peaches, for prime to choice. 6y2@7c for same; Stmr Empire, Reed, 7u hours from Coos Bay: jbliver CORN— February, 22^c; May, 24y8c; July, Louisville & Nash. 49 ! Prelerred 67V« 4&M/<B-.- for pre.cd in 9.640 mdse.etc ioiit &n Co.y. -. > 1*- r- Louisville. fancy mid . @loc boxes:' Apuiea. 50 plumbing, gas- Aiony U 8Rubber >ame with t-tmuel . -
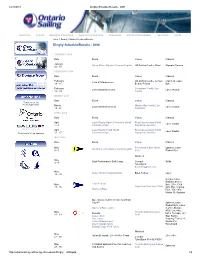
Dinghy Schedule/Resultsана2004
12/16/2014 Dinghy Schedule/Results 2004 ABOUT US RACING MEMBERS & SERVICES INSTRUCTOR SERVICES PROGRAMS SAILOR DEVELOPMENT THE STORE LOGIN Home > Racing > Racing Schedules/Results Dinghy Schedule/Results 2004 JANUARY 2004 Date Event Venue Classes January Rolex Miami Olympic Classes Regatta US Sailing Centre, Miami Olympic Classes 26 30 FEBRUARY 2004 Date Event Venue Classes February US Sailing Centre, Jensen Club 420, Laser, Club 420 Midwinters 14 15 Beach, Florida Byte February Clearwater Yacht Club, Laser Midwinters East Laser, Radial 26 29 Florida MARCH 2004 Date Event Venue Classes Thank you to our Premier Sponsors: March Mission Bay Yacht Club, Laser Midwinters West Laser, Radial 19 21 California APRIL 2004 Date Event Venue Classes April Laser Radial Open & Women's World Royal Queensland Yacht Laser Radial 1 8 Championships Squadron, Australia April Laser Radial Youth World Royal Queensland Yacht Laser Radial Check out all of our sponsors 10 17 Championships Squadron, Australia MAY 2004 Date Event Venue Classes May Frenchman's Bay Yacht Optimist, Laser, Unistrut Central Mother’s Day Regatta 8 9 Club Radial, Byte Montreal May High Performance Skiff Camp Contact: Skiffs 8 9 Tyler Bjorn [email protected] May Laser World Championships Bitez, Turkey Laser 10 19 Europe, Laser, Radial, Laser 2, May Lilac Festival Byte, 29er, Club 15 16 Royal Hamilton Yacht Club 420, Star, Yngling, Notice of Race Finn, 470, 49er, Martin 16, Optimist Queensway Audi Icebreakers & Gold Cup #1 Optimist, Laser, Radial, Byte, Laser Notice -
Sail and Paddle Newsletter of the Toronto Sailing & Canoe Club
Sail and Paddle Newsletter of the Toronto Sailing & Canoe Club December 2005 Editor: Al Schönborn Wayfarers lead the Sailing in T.S.&C.C. 2005 was a suc- Derek Griffiths cessful racing for providing season for our our fleet with fleet, both at safety boat cov- home and away. erage. Our TS&CC once TSCC was also again hosted the well represent- very popular ed at away Queensway Audi regattas, espe- Icebreaker cially by the Olympic Classes team of Al Regatta in May, Schonborn and followed by Marc Bennett, Derek Griffith's who pretty "baby", TARTS & much swept the Balls, in early 2005 Wayfarer June. July 2005 events, and who brought us an threw in a cou- excellent race ple of wins in around Toronto other classes: Island, now re- CL 16's at the named the Geo. CanAm Regatta Blanchard near Sault Ste. Around-the- Marie, as well Island Race. In late August, TSCC played host to the as in Rebels at the Clark Lake Fall Regatta in Michigan. Canadian Wayfarer Nationals which attracted 19 Thanks to the hard work of Anna Wharton and Heider entries, and was easily the best attended Wayfarer Funck, our sailing school Wayfarers have 6 new suits of event of 2005. sails which were donated by condo builders, Monarch On the Club Race scene, the Wayfarers continued to and Waterview, in return for our sailing Wayfarers on provide the core of our racing fleet, averaging over 10 the waterfront off their condos. boats on the line on race nights. The fine level of com- petition was reflected by the fact that we had several 2006 promises to be a busy year on the racing front for different series winners, including octogenarian, Sid the Toronto Sailing & Canoe Club, with the following Atkinson. -

Grandboats.Com 2020 Golden Line 6 Silver Line 36 Drive 54 Technical Data 68
GRANDBOATS.COM 2020 GOLDEN LINE 6 SILVER LINE 36 DRIVE 54 TECHNICAL DATA 68 2 GRANDBOATS.COM 3 4 GRANDBOATS.COM SAFETY IS OUR PRIMARY HIGH QUALITY 1 CONSIDERATION 4 AND FAIR PRICES Our primary consideration is to provide a safe environment for Our Our definition of "Quality" is that the product meets not only our Customers Customers. The safety aspects of every new model are therefore requirements but also those set out in international standards such thoroughly reviewed at the start of the design process. Regardless as International Standards EN ISO 6185, EN ISO 12217 the European of which model you choose, be it our smallest tender for your yacht Union Directive 2013/53/EU and ABYC standards. Our internal quality or the fabulous G850 Day Cruiser — you will always feel safe on management procedures are amongst the highest in the industry so the a GRAND Infl atable Boat. challenge has been to achieve this at a cost that ensures good value for money. Based on the feedback we receive from our customers we seem to be doing this rather well! UNIQUE DESIGNS AND 2 TECHNICAL PERFECTION! BEST MATERIALS Every GRAND model incorporates a unique combination of innovative FOR BEST BOATS techniques, patented designs plus many years of experience and 5 expertise. By utilizing the latest CAD/CAM technology with the most GRAND's inflatables are made from five layers of 1100 Dtes Polyester advanced software, every GRAND is perfected to the smallest detail fabric and 1680 Dtex, which is reinforced with MIRASOL and HEYTEX to ensure the utmost quality. -

Centerboard Classes NAPY D-PN Wind HC
Centerboard Classes NAPY D-PN Wind HC For Handicap Range Code 0-1 2-3 4 5-9 14 (Int.) 14 85.3 86.9 85.4 84.2 84.1 29er 29 84.5 (85.8) 84.7 83.9 (78.9) 405 (Int.) 405 89.9 (89.2) 420 (Int. or Club) 420 97.6 103.4 100.0 95.0 90.8 470 (Int.) 470 86.3 91.4 88.4 85.0 82.1 49er (Int.) 49 68.2 69.6 505 (Int.) 505 79.8 82.1 80.9 79.6 78.0 A Scow A-SC 61.3 [63.2] 62.0 [56.0] Akroyd AKR 99.3 (97.7) 99.4 [102.8] Albacore (15') ALBA 90.3 94.5 92.5 88.7 85.8 Alpha ALPH 110.4 (105.5) 110.3 110.3 Alpha One ALPHO 89.5 90.3 90.0 [90.5] Alpha Pro ALPRO (97.3) (98.3) American 14.6 AM-146 96.1 96.5 American 16 AM-16 103.6 (110.2) 105.0 American 18 AM-18 [102.0] Apollo C/B (15'9") APOL 92.4 96.6 94.4 (90.0) (89.1) Aqua Finn AQFN 106.3 106.4 Arrow 15 ARO15 (96.7) (96.4) B14 B14 (81.0) (83.9) Bandit (Canadian) BNDT 98.2 (100.2) Bandit 15 BND15 97.9 100.7 98.8 96.7 [96.7] Bandit 17 BND17 (97.0) [101.6] (99.5) Banshee BNSH 93.7 95.9 94.5 92.5 [90.6] Barnegat 17 BG-17 100.3 100.9 Barnegat Bay Sneakbox B16F 110.6 110.5 [107.4] Barracuda BAR (102.0) (100.0) Beetle Cat (12'4", Cat Rig) BEE-C 120.6 (121.7) 119.5 118.8 Blue Jay BJ 108.6 110.1 109.5 107.2 (106.7) Bombardier 4.8 BOM4.8 94.9 [97.1] 96.1 Bonito BNTO 122.3 (128.5) (122.5) Boss w/spi BOS 74.5 75.1 Buccaneer 18' spi (SWN18) BCN 86.9 89.2 87.0 86.3 85.4 Butterfly BUT 108.3 110.1 109.4 106.9 106.7 Buzz BUZ 80.5 81.4 Byte BYTE 97.4 97.7 97.4 96.3 [95.3] Byte CII BYTE2 (91.4) [91.7] [91.6] [90.4] [89.6] C Scow C-SC 79.1 81.4 80.1 78.1 77.6 Canoe (Int.) I-CAN 79.1 [81.6] 79.4 (79.0) Canoe 4 Mtr 4-CAN 121.0 121.6 -
2021 Dockage & Storage Fees
2021 Dockage & Storage Fee Calculation MembershipMemberFirstNameMemberLastNameBoatName BoatMakeModelLOA Beam Draft BrochureWeightActualWeightTotal sq.ft. Dock Fee Winter Storage Full Peter Aldir Perryfis Sirius 28 28 9.67 4.3 6700 8000 270.76 $1,117.61 $259.93 Full Richard Allan Irony S2 29.92 10.25 4.92 9800 10100 306.68 $1,245.85 $294.41 Full Robin Allen Maid MarianAloha 8.2 26.5 9.42 4.33 5200 7200 249.63 $1,042.18 $239.64 Spousal Don Allin Salut Ontario 32 32 11 4.5 9800 13000 352.00 $1,407.64 $337.92 Full David Armstrong Aeron Hughes 38 MK III 38 10.17 6 12700 16500 386.46 $1,530.66 $371.00 Full Greg Armstrong WindspirationCatalina 30 Mk II29.92 10.83 5.25 10200 12500 324.03 $1,307.80 $311.07 Full Harley Armstrong RapscallionCatalina 30 29.92 10.83 5.25 10200 0 324.03 $1,307.80 $311.07 Full Scott Ashley Lyric I Niagara 31 31.25 10.25 5 8000 12000 320.31 $1,294.52 $307.50 Spousal Chris Avery Already GoneTanzer 26 26.33 8.67 3.83 4350 5700 228.28 $965.96 $219.15 Spousal Tim Baetz Querida Challenger 24/7.524.33 8.17 3.42 4000 5500 198.78 $860.63 $190.83 Spousal Bruce Baker Oblio CS 33 32.67 10.67 4.58 10000 13000 348.59 $1,395.46 $334.65 Full Doug Baker Express MailExpress 30 30 10 5.5 8200 9300 300.00 $1,222.00 $288.00 Spousal Daryl Baxter Olajuna Express 35 35 11.5 5.42 11500 14600 402.50 $1,587.93 $386.40 Spousal Terry Bell Moon ShadowC & C 32 31.5 10.25 5.67 9680 0 322.88 $1,303.66 $309.96 Spousal Cameron Berry Paradise nineBeneteau 400 39.83 12.83 5.5 18210 0 511.02 $1,975.34 $490.58 Full Richard Birchall Flutterbye Roberts 246 -

Bis Central Laboratory, Sahibabad [Q.A
The revised BIS testing charges for IS 9968(Pt-2):2002 effective from 24-03-2017 BIS CENTRAL LABORATORY (Electrical Department) Our Ref: CL/E/IS 9968 18th Oct 2016 TESTING CHARGES FOR IS 9968 (Part –II):1981 EL;ASTOMER INSULATED CABLES PART II FOR WORKING VOLTAGE FROM 3.3 KV UPTO & INCLUDING 33 KV S.NO. TESTS MAN-HOURS 1. General construction 1 identification & marking 2. Conductor a) Diameter of wires ½ b) Resistance to test 1 c) Annealing test for Copper 1 d) Persulphate test for copper 1 e) Wrapping test for Aluminium ½ f) Tensile strength for aluminium 1 3. Radial thickness of insulation ½ 4. Radial thickness of inner ½ sheath 5. Radial thickness of outer ½ sheath 6. Physical test on insulation a) Before ageing 1 ½ i) Tensile strength & Elongation b) After ageing in air over 2 (Long time test) ii) Tensile strength & elongation 7. Physical test on inner sheath (General purpose for HOFR elastimeric compound) a) Before ageing i) Tensile strength and 1 ½ elongation b) Oil resistance ii) Tensile strength and 2 elongation 8. Physical test on outer sheath (Heavy duty HOFR) elastimeric compound) a) Before ageing i) Tensile strength and 1 ½ elongation at break ii) Tear Resistance 1 iii) Tensile stress at 200 Percent elongation 1 b) Oil Resistance i) Tensile strength & 2 elongation 9. Physical test on inner Sheath (Type 5PVC compound) i) Tensile strength I elongation 1 ½ ii) Shrinkage 1 iii) Hot deformation 1 iv) Ageing 1 10. Physical test on outer Sheath (Type 5 or 8 PVC Compound) i) Tensile strength I 1 ½ elongation ii) Shrinkage 1 iii) Hot deformation 1 iv) Ageing 1 11. -
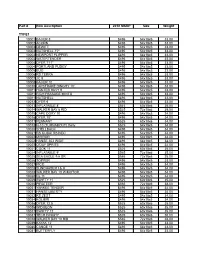
2018 Master Pricing for Website
Part # Item Description 2018 MSRP Size Weight TYPE1 10001 BAUER 8 $495 54x18x5 33.00 10002 ACORN $495 54x18x5 33.00 10003 DEWITT $495 54x18x5 33.00 10003 NUTSHELL 7'7" $495 54x18x5 33.00 10003 NEWPORT FLIPPER $495 54x18x5 33.00 10003 WATERTENDER $495 54x18x5 33.00 10004 DYER 7'11" $495 54x18x5 33.00 10004 PORTLAND PUDGY $495 54x18x5 33.00 10005 BUG $495 54x18x5 33.00 10006 RS TERRA $495 54x18x5 33.00 10007 JC 9 $495 54x18x5 33.00 10008 BAUER 10 $495 54x18x5 33.00 10010 LAPSTRAKE DINGHY 10', $495 54x18x5 33.00 10011 HUNTER 90/JY 9 $495 54x18x5 33.00 10011 RICH PASSAGE MINTO $495 54x18x5 33.00 10011 NUTSHELL $495 54x18x5 33.00 10012 DYER 9 $495 54x18x5 33.00 10013 INFLATABLE 8' $545 60x18x6 35.00 10014 WALKER BAY 8 RID $525 72x18x6 39.00 10015 CAPE DORY 10 $495 54x18x5 34.00 10016 DYER 10' $495 54x18x5 34.00 10017 PENNANT $525 60x18x6 34.00 10018 N-10 (TURNABOUT) Dolly $525 54x18x5 34.00 10020 SHELLBACK $495 54x18x5 34.00 10021 RS QUBA/ RS NEO $495 54x18x5 34.00 10022 MIRROR $495 54x18x5 34.00 10022 HANSE 303 WIDE $495 54x18x5 34.00 10022 O'DAY SPRITE $495 54x18x5 34.00 10021 COOK 11 $525 60x18x6 35.00 10024 INFLATABLE 9' $565 72x18x6 35.00 10025 SEA EAGLE 9.6 SR $565 72x18x6 35.00 10026 TOPPER $495 54x18x5 33.00 10027 PICO $495 54x18x5 34.00 10028 SUNCHASER I & II $495 54x18x5 34.00 10028 WALKER BAY 10 W/MOTOR, $495 54x18x5 34.00 10028 CL 11 $495 54x18x5 34.00 10029 SWIFTY 11 $525 60x18x6 35.00 10030 PIRATEER $565 72x18x6 38.00 10031 YANKEE TENDER $495 54x18x5 34.00 10031 HANSE LIBERTY $495 54x18x5 34.00 10032 RS ZEST $495 54x18x5 34.00 -

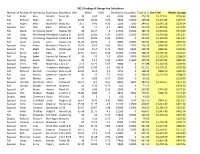
2019 Racing Class Handicaps ALL KNOWN BOATS
2019 Racing Class Handicaps ALL KNOWN BOATS The following table is a listing of all known boat classes and their assigned base ratings set by the Race Coordinator for the 2019 racing season. GSSC has adopted US Sailing’s model of the Portsmouth Yardstick – an internationally recognized handicap system – and uses its Table of Precalculated Classes as a reference. When Yardstick numbers are unavailable, GSSC refers to the published ratings of US Sailing’s Performance Handicap Racing Fleet (PHRF) – another internationally recognized system. Where neither Yardstick or PHRF ratings are available, GSSC uses the “Schell Regression Formula” with available boat measurements to create PHRF and Yardstick ratings. Boats with insufficient data cannot receive a rating. At minimum, the Shell Regression Formula requires the boat’s length at water level (LWL), weight/displacement, draft, and sail dimensions (I-J-P-E). Individual Adjustments Individual adjustments may be made to address rigging setup or hull modifications. For example, a boat that is normally equipped with a spinnaker may get an adjustment to compensate for a lack of spinnaker, or a boat that normally has an inboard motor may get an adjustment to reflect its use of an outboard motor. Individual adjustments are made at the Race Coordinator’s discretion and on a case- by-case basis. Individual adjustments are made and posted separately from this table of class ratings. Table Headings The following headings are found on this table: • CLASS (MODEL) – the name of the class or model • BOATS – the number of boats known to be part of this class • DPN – the base Yardstick rating for each class • DPN1 to DPN4 – if available, the alternate Yardstick ratings for each class used in accordance with the Beaufort wind scale • PHRF – the base PHRF rating for each class • TIME @ 10NM – for reference, the example expected time for each boat to complete a straight 10-mile course based on the Yardstick/PHRF ratings provided.