Composite Finite Elements for Trabecular Bone Microstructures
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Combinatorics: the Fine Art of Counting
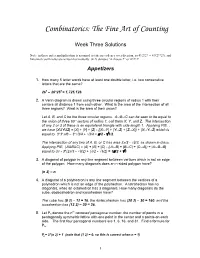
Combinatorics: The Fine Art of Counting Week Three Solutions Note: in these notes multiplication is assumed to take precedence over division, so 4!/2!2! = 4!/(2!*2!), and binomial coefficients are written horizontally: (4 2) denotes “4 choose 2” or 4!/2!2! Appetizers 1. How many 5 letter words have at least one double letter, i.e. two consecutive letters that are the same? 265 – 26*254 = 1,725,126 2. A Venn diagram is drawn using three circular regions of radius 1 with their centers all distance 1 from each other. What is the area of the intersection of all three regions? What is the area of their union? Let A, B, and C be the three circular regions. A∪B∪C can be seen to be equal to the union of three 60° sectors of radius 1, call them X, Y, and Z. The intersection of any 2 or 3 of these is an equilateral triangle with side length 1. Applying PIE, , we have |XUYUZ| = |X| + |Y| + |Z| - (|X∪Y| + |Y∪Z| + |Z∪X|) + |X∪Y∪Z| which is equal to 3*3*π/6 – 3*√3/4 + √3/4 = π/2 - √3/2. The intersection of any two of A, B, or C has area 2π/3 - √3/2, as shown in class. Applying PIE, |AUBUC| = |A| + |B| + |C| - (|A∪B| + |B∪C| + |C∪A|) + |A∪B∪B| equal to 3π - 3*(2π/3 - √3/2) + (π/2 - √3/2) = 3π/2 + √3 3. A diagonal of polygon is any line segment between vertices which is not an edge of the polygon. -

Almost-Magic Stars a Magic Pentagram (5-Pointed Star), We Now Know, Must Have 5 Lines Summing to an Equal Value
MAGIC SQUARE LEXICON: ILLUSTRATED 192 224 97 1 33 65 256 160 96 64 129 225 193 161 32 128 2 98 223 191 8 104 217 185 190 222 99 3 159 255 66 34 153 249 72 40 35 67 254 158 226 130 63 95 232 136 57 89 94 62 131 227 127 31 162 194 121 25 168 200 195 163 30 126 4 100 221 189 9 105 216 184 10 106 215 183 11 107 214 182 188 220 101 5 157 253 68 36 152 248 73 41 151 247 74 42 150 246 75 43 37 69 252 156 228 132 61 93 233 137 56 88 234 138 55 87 235 139 54 86 92 60 133 229 125 29 164 196 120 24 169 201 119 23 170 202 118 22 171 203 197 165 28 124 6 102 219 187 12 108 213 181 13 109 212 180 14 110 211 179 15 111 210 178 16 112 209 177 186 218 103 7 155 251 70 38 149 245 76 44 148 244 77 45 147 243 78 46 146 242 79 47 145 241 80 48 39 71 250 154 230 134 59 91 236 140 53 85 237 141 52 84 238 142 51 83 239 143 50 82 240 144 49 81 90 58 135 231 123 27 166 198 117 21 172 204 116 20 173 205 115 19 174 206 114 18 175 207 113 17 176 208 199 167 26 122 All rows, columns, and 14 main diagonals sum correctly in proportion to length M AGIC SQUAR E LEX ICON : Illustrated 1 1 4 8 512 4 18 11 20 12 1024 16 1 1 24 21 1 9 10 2 128 256 32 2048 7 3 13 23 19 1 1 4096 64 1 64 4096 16 17 25 5 2 14 28 81 1 1 1 14 6 15 8 22 2 32 52 69 2048 256 128 2 57 26 40 36 77 10 1 1 1 65 7 51 16 1024 22 39 62 512 8 473 18 32 6 47 70 44 58 21 48 71 4 59 45 19 74 67 16 3 33 53 1 27 41 55 8 29 49 79 66 15 10 15 37 63 23 27 78 11 34 9 2 61 24 38 14 23 25 12 35 76 8 26 20 50 64 9 22 12 3 13 43 60 31 75 17 7 21 72 5 46 11 16 5 4 42 56 25 24 17 80 13 30 20 18 1 54 68 6 19 H. -
THE ZEN of MAGIC SQUARES, CIRCLES, and STARS Also by Clifford A
THE ZEN OF MAGIC SQUARES, CIRCLES, AND STARS Also by Clifford A. Pickover The Alien IQ Test Black Holes: A Traveler’s Guide Chaos and Fractals Chaos in Wonderland Computers and the Imagination Computers, Pattern, Chaos, and Beauty Cryptorunes Dreaming the Future Fractal Horizons: The Future Use of Fractals Frontiers of Scientific Visualization (with Stuart Tewksbury) Future Health: Computers and Medicine in the 21st Century The Girl Who Gave Birth t o Rabbits Keys t o Infinity The Loom of God Mazes for the Mind: Computers and the Unexpected The Paradox of God and the Science of Omniscience The Pattern Book: Fractals, Art, and Nature The Science of Aliens Spider Legs (with Piers Anthony) Spiral Symmetry (with Istvan Hargittai) The Stars of Heaven Strange Brains and Genius Surfing Through Hyperspace Time: A Traveler’s Guide Visions of the Future Visualizing Biological Information Wonders of Numbers THE ZEN OF MAGIC SQUARES, CIRCLES, AND STARS An Exhibition of Surprising Structures across Dimensions Clifford A. Pickover Princeton University Press Princeton and Oxford Copyright © 2002 by Clifford A. Pickover Published by Princeton University Press, 41 William Street, Princeton, New Jersey 08540 In the United Kingdom: Princeton University Press, 3 Market Place, Woodstock, Oxfordshire OX20 1SY All Rights Reserved Library of Congress Cataloging-in-Publication Data Pickover, Clifford A. The zen of magic squares, circles, and stars : an exhibition of surprising structures across dimensions / Clifford A. Pickover. p. cm Includes bibliographical references and index. ISBN 0-691-07041-5 (acid-free paper) 1. Magic squares. 2. Mathematical recreations. I. Title. QA165.P53 2002 511'.64—dc21 2001027848 British Library Cataloging-in-Publication Data is available This book has been composed in Baskerville BE and Gill Sans. -
Geometrygeometry
Math League SCASD 2019-20 Meet #5 GeometryGeometry Self-study Packet Problem Categories for this Meet: 1. Mystery: Problem solving 2. Geometry: Solid Geometry (Volume and Surface Area) 3. Number Theory: Set Theory and Venn Diagrams 4. Arithmetic: Combinatorics and Probability 5. Algebra: Solving Quadratics with Rational Solutions, including word problems Important Information you need to know about GEOMETRY: Solid Geometry (Volume and Surface Area) Know these formulas! SURFACE SHAPE VOLUME AREA Rect. 2(LW + LH + LWH prism WH) sum of areas Any prism H(Area of Base) of all surfaces Cylinder 2 R2 + 2 RH R2H sum of areas Pyramid 1/3 H(Base area) of all surfaces Cone R2 + RS 1/3 R2H Sphere 4 R2 4/3 R3 Surface Diagonal: any diagonal (NOT an edge) that connects two vertices of a solid while lying on the surface of that solid. Space Diagonal: an imaginary line that connects any two vertices of a solid and passes through the interior of a solid (does not lie on the surface). Category 2 Geometry Calculator Meet Meet #5 - April, 2018 1) A cube has a volume of 512 cubic feet. How many feet are in the length of one edge? 2) A pyramid has a rectangular base with an area of 119 square inches. The pyramid has the same base as the rectangular solid and is half as tall as the rectangular solid. The altitude of the rectangular solid is 10 feet. How many cubic inches are in the volume of the pyramid? 3) Quaykah wants to paint the inside of a cylindrical storage silo that is 63 feet high and whose circular floor has a diameter of 19 feet. -

MAΘ Theta CPAV Solutions 2018
MAΘ Theta CPAV Solutions 2018 Since the perimeter of the square is 40, one side of the square is 10 & its area is 100. Since the 1. B diameter of the circle is 8 its radius is 4. One quarter of the circle is inside the square; its area is 1 1 퐴 = 휋(42) = 휋(16) = 4휋. The area inside the square but outside the circle is 100 − 4휋. 4 4 Since the diameter of the sphere is 20 feet, its radius is 10 feet. 4 4 4000휋 1200휋 푉 = 휋푟3 = 휋103 = ; 퐴 = 4휋푟2 = 4휋102 = 400휋 = ; 3 3 3 3 2. C 1200휋 4000휋 5200휋 퐴 + 푉 = + = 3 3 3 3. B Since the diameter is 18 퐶 = 휋푑 = 18휋 4. A 3 3 288 2 푉 = 푎 ⁄ = 12 ⁄ = 1728⁄ = 288⁄ = √ ⁄ = 144√2 6√2 6√2 6√2 √2 2 20 Use the given circumference to find the radius of the circle. 퐶 = 2휋푟, 40 = 2휋푟, 20 = 휋푟, ⁄휋 = 푟 . If the inscribed angle is 45∘ its arc is 90∘ and has length 10, one quarter of the circumference. The chord of the 5. D segment is the hypotenuse of an isosceles right triangle whose legs are radii of the circle. 20 20√2 ℎ = 푙푒√2 = ⁄휋 √2 = ⁄휋 20√2 Perimeter of the segment is arc length plus chord: 10 + ⁄휋 Since the diameter of the sphere is the space diagonal of the inscribed cube, we must first find the diameter of the sphere. 6. B 4 125휋 3 4 125휋(3√3) 125 27 5 3 푉 = 휋푟3; √ = 휋푟3; = 푟3; √ = 푟3; √ = 푟 and diameter is 5√3 3 2 3 8휋 8 2 Space diagonal of a cube is 푎√3 = 5√3; 푎 = 5 and surface area is 6푎2 = 6 ∙ 52 = 150 Radius found using the circular cross-section area 퐴 = 휋푟2; 9휋 = 휋푟2; 푟 = 3; ℎ = 3푟 == 9 Volume is equal to volume of cylinder minus volume of hemisphere. -

Homework 2: Vectors and Dot Product
Math 21a: Multivariable calculus Fall 2017 Homework 2: Vectors and Dot product This homework is due Monday, 9/11 respectively Tuesday 9/12 at the beginning of class. 1 A kite surfer gets pulled with a force F~ = h7; 1; 4i. She moves with velocity ~v = h4; −2; 1i. The dot product of F~ with ~v is power. a) Find the angle between the F~ and ~v. b) Find the vector projection of the F~ onto ~v. Solution: (a) To find the angle between the force and velocity, we use the formula: F · v cos θ = : jF jjvj p p 2 2 2 The magnitude of the forcep is 7 + 1 + 4 = 66. The mag- nitude of the velocity is 21. The dot product F · v = 30. Thus, F · v 30 cos θ = = p p jF jjvj 66 · 21 Hence, θ = arccos(p30 ). 1386 (b) The projection of F~ onto ~v is given by F · v 30 10 projvF = v = p 2 h4; −2; 1i = h4; −2; 1i: jvj2 21 7 2 Light shines long the vector ~a = ha1; a2; a3i and reflects at the three coordinate planes where the angle of incidence equals the 1 angle of reflection. Verify that the reflected ray is −~a. Hint. Reflect first at the xy-plane. Solution: If we reflect at the xy-plane, then the vector ~a = ha1; a2; a3i gets changed to ha1; a2; −a3i. You can see this by watching the reflection from above. Notice that the first two components stay the same. Do the same process with the other planes. -

3-D (Intermediate UKMT)
3-D (Intermediate UKMT) These questions must be attempted without a calculator Topics covered in the questions below may not necessarily be from the topic of the title. 1. A solid ‘star’ shape is created by gluing a square-based pyramid, in which each edge is of length 1 unit, precisely onto each face of a cube of edge 1 unit. How many faces does this ‘star’ have? A 18 B 24 C 30 D 36 E 48 2. Four of these shapes can be placed together to make a cube. Which is the odd one out? A B C D E 3. The figure shows a net for a cube with a number on each face. When the cube is made, three faces meet at each vertex. The numbers on the three faces which meet at each vertex are multiplied together. What is the largest product obtained? 1 4 2 5 6 3 A 40 B 60 C 72 D 90 E 120 4. Each edge of a cube is coloured either red or black. If every face of the cube has at least one black edge, what is the smallest possible number of black edges? A 2 B 3 C 4 D 5 E 6 5. The total length of all the edges of a cube is L cm. If the surface area of the cube has the same numerical value Lcm2 what is its volume in cm3? A 1 B L C 2 D L3 E 8 6. Three rectangular-shaped holes have been drilled passing all the way through a solid 3 × 4 × 5 cuboid. -

Math Wrangle Practice Problems II Solutions
Math Wrangle Practice Problems II Solutions American Mathematics Competitions December 22, 2011 l. Answer (839): Note that ((3!)!)! (6!)! 720! 720 . 719! --- = 120 . 719!' 3! 6 6 6 Because 120 . 719! < 720!, conclude that n must be less than 720, so the maximum value of n is 719. The requested value of k + n is therefore 120 + 719 = 839. 2. Answer (301): The sum of the areas of the green regions is [(22 _12) + (42 - 32) + (62 - 52) + ... + (1002 - 992)J 7'1 = [(2 + 1) + (4 + 3) + (6 + 5) + ... + (100 + 99)] 7'1 1 = "2 . 100 . 1017'1. Thus the desired ratio is 1 100· 1017'1 101 2 10027'1 200 ' and m + n = 301. 3. Answer (484): Since each element x of S is paired exactly once with every other element in the set, the number of times x contributes to the sum is the number of other elements in the set that are smaller than x. For example, the first nurnber, 8, will contribute four tim.es to the sum because the greater elements of the subsets {8,5}, {8, I}, {8,3}, and {8,2} are all 8. Since the order of listing the elements in the set is not significant, it is helpful to first sort the elements of the set in increasing order. Thus, since S = {I, 2, 3, 5, 8,13,21, 34}, the sum of the numbers on the list is 0(1) + 1(2) + 2(3) + 3(5) + 4(8) + 5(13) + 6(21) + 7(34) = 484. 4. Answer (012): Use logarithm properties to obtain log(sinxcosx) = -1, and then sinx cos x = 1/10. -

Year 7 Volumes
Year 7 Volumes Exercise 1 – Vertices, Edges and Faces 1. [IMC 2015 Q7] A 6. [IMC 2015 Q17] The football tetrahedron is a solid shown is made by sewing figure which has four together 12 black pentagonal faces, all of which are panels and 20 white triangles. What is the product of the hexagonal panels. There is a join number of edges and the number of wherever two panels meet along an vertices of the tetrahedron? edge. How many joins are there? 2. [IMC 2006 Q5] A solid ‘star’ shape is created by gluing a square-based 7. [IMC 1999 Q14] Which of the pyramid, in which each edge is of following statements is false? length 1 unit, precisely onto each face A an octagon has twenty diagonals of a cube of edge 1 unit. How many B a hexagon has nine diagonals faces does this ‘star’ have? C a hexagon has four more diagonals than a pentagon 3. [JMC 2004 Q8] A solid D a pentagon has the same number square-based pyramid of diagonals as it has sides has all of its corners cut E a quadrilateral has twice as many off, as shown. How diagonals as it has sides many edges does the resulting shape have? [IMC 1997 Q24] A regular dodecahedron is a polyhedron with 4. [JMO 2011 A5] The base of a pyramid twelve faces, each of which is a has 푛 edges. In terms of 푛, what is the regular pentagon. A difference between the number of space diagonal of the edges of the pyramid and the number dodecahedron is a line of its faces? segment which joins two vertices of the 5. -

Thomas A. Plick Tomplick@ Gmail
#A3 INTEGERS 17 (2017) A NEW CONSTRAINT ON PERFECT CUBOIDS Thomas A. Plick [email protected] Received: 10/5/14, Revised: 9/17/16, Accepted: 1/23/17, Published: 2/13/17 Abstract We show that out of the seven segment lengths (three edges, three face diagonals, and space diagonal) of a perfect cuboid, one length must be divisible by 25, and out of the other six lengths, one must be divisible by 25 or two must be divisible by 5. 1. The Result A perfect cuboid is a rectangular prism whose edges, face diagonals, and space diagonals are all of integer length. Suppose we have a prism with dimensions a b c. ⇥ ⇥ We denote by d, e, f the lengths of the diagonals of the a b, a c, and b c ⇥ ⇥ ⇥ faces respectively. Finally, we denote by g the length of the space diagonals of the prism (the line segments connecting opposite corners). We call the seven quantities a, b, c, d, e, f, g the segment lengths of the prism. We can see that any perfect cuboid results in a solution to the system of Diophantine equations a2 + b2 = d2 a2 + c2 = e2 b2 + c2 = f 2 a2 + b2 + c2 = g2 where all the variables are positive. No perfect cuboid is known to exist; the existence or nonexistence of a perfect cuboid is one of the most famed outstanding problems in number theory (men- tioned by [2] and many, many others). A closely related problem is that of finding a rectangular prism in which all but one of the segment lengths are integers. -

Intermediate Mathematics League of Eastern Massachusetts
IMLEM Meet #3 January 2013 Intermediate Mathematics League of Eastern Massachusetts Category 1 Mystery Meet #3, January 2013 1. The words shown below are special in that they each use only one vowel repeatedly. For each word, find the fraction of letters that are vowels, then write the two fractions in order from least to greatest on the answer line. ABRACADABRA EFFERVESCENCE 2. It’s pouring rain outside and Jonathan has two leaks in his roof. The first leak drips at a rate of 1 liter every 45 minutes and the other at 1 liter every 30 minutes. Assuming Jonathan has big enough buckets, how many hours will it take for him to collect 10 liters of water from the two leaks? 3. If this spiral lattice continues in the same manner, what number will be directly below 400? . 21 22 23 24 25 26 . 20 7 8 9 10 27 . 19 6 1 2 11 28 Answers 39 18 5 4 3 12 29 1. __________,__________ 38 17 16 15 14 13 30 37 36 35 34 33 32 31 2. ___________ ___ hours 3. ___________ __________ Solutions to Category 1 Answers Mystery 5 5 Meet #3, January 2013 1. , 13 11 1. The word “ABRACADABRA” has 5 repeat vowels 2. 3 hours and 11 letters. “EFFERVESCENCE” has 5 repeat 3. 483 vowels and 13 letters. Thirteenths are smaller than € € elevenths and we have five of each, so the fractions, 5 5 in order from least to greatest, are , . 13 11 2. Every 90 minutes, Jonathan will collect 2 liters from the first drip and 3 liters from the second drip. -
Introduction to Geometry" ©2014 Aops Inc
Excerpt from "Introduction to Geometry" ©2014 AoPS Inc. www.artofproblemsolving.com INDEX Index , 231 Angle-Angle-Side Congruence Theorem, 61 , \, 13 angle-chasing, 29 ⇡, 285 Angle-Side-Angle Congruence Theorem, 61 3-D Geometry, 356–407 angles, 13–48 30-60-90 triangle, 144 acute, 18 45-45-90 triangle, 142 adjacent, 19 alternate exterior, 27 AA Similarity, 101 alternate interior, 27 proof of, 119 between a tangent and a chord, 319 AAS Congruence, 61 between a tangent and a secant, 320 acute, 18 between two chords, 312 adjacent angles, 19 between two secants, 313 alternate exterior angles, 27 central, 286 alternate interior angles, 27 complementary, 22 altitudes, foot of, 86 corresponding, 27 AMC, vii dihedral, 359 American Mathematics Competitions, see AMC exterior, 36 American Regions Math League, see ARML inscribed, 304–310, 320 analytic geometry, 435–477 interior, 36 angle bisector, 171 reflex, 19 Angle Bisector Theorem, 181, 201 remote interior, 37 angle of depression, 502 right, 17 angle of elevation, 502 same-side exterior, 27 Angle-Angle Similarity, 101 same-side interior, 27 proof of, 119 552 Copyrighted Material Excerpt from "Introduction to Geometry" ©2014 AoPS Inc. www.artofproblemsolving.com INDEX straight, 21 congruent, 49 supplementary, 22 conjecture, 10 trisection, 338 construction, 7 vertical, 23 angle bisector, 197 Annairizi of Arabia, 162 copy an angle, 121 apex, 366 equilateral triangle, 72 apothem, 252 parallel lines, 121 arc, 6, 284 perpendicular bisector, 73 Archimedes, 289, 293, 407 perpendicular lines, 161 area,