Mars Exploration Rover: Thermal Design Is a System Engineering Activity
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

The Actinide Research Quarterly Highlights Recent Achievements and Ongoing Programs of the Nuclear Materials Technology (NMT) Division
1st quarter 2001 TheLos Actinide Alamos National Research Laboratory N u c l e a r M Quarterlya t e r i a l s R e s e a r c h a n d T e c h n o l o g y Researcher Provides a Historical Perspective for Plutonium Heat Sources In This Issue We begin the seventh year of Actinide Research Quarterly For more than 30 years, by focusing on Los Alamos has designed, major programs in 4 developed, manufactured, NMT Division. The Pit Manufacturing and tested heat sources for publication team Project Presents Many radioisotope thermoelectric also welcomes its Challenges generators (RTGs). These new editor, Meredith powerful little “nuclear “Suki” Coonley, who is 6 batteries” produce heat assuming the position Can Los Alamos from the decay of radioac- while Ann Mauzy Meet Its Future Nuclear tive isotopes—usually takes on acting Challenges? plutonium-238—and can management provide electrical power duties in IM-1. 9 and heat for years in Detecting and satellites, instruments, K.C. Kim Predicting Plutonium and computers. Aging are Crucial to continued on page 2 Stockpile Stewardship 12 Pit Disassembly and Conversion Address a ‘Clear and Present Danger’ 14 Publications and Invited Talks Newsmakers 15 Energy Secretary Spencer Abraham Addresses Employees artist rendering of Rover Pathfinder on Mars from NASA/JPL Nuclear Materials Technology/Los Alamos National Laboratory 1 Actinide Research Quarterly This article was contributed by Gary Rinehart (NMT-9) Early development efforts from the Each Multihundred Watt RTG provided about 157 mid-1960s through the early 1970s focused watts of power at the beginning of the mission. -

Radioisotope Power Systems Reference Book for Mission Designers and Planners
https://ntrs.nasa.gov/search.jsp?R=20160001769 2019-08-31T04:26:04+00:00Z JPL Publication 15-6 Radioisotope Power Systems Reference Book for Mission Designers and Planners Radioisotope Power System Program Office Young Lee Brian Bairstow Jet Propulsion Laboratory National Aeronautics and Space Administration Jet Propulsion Laboratory California Institute of Technology Pasadena, California September 2015 JPL Publication 15-6 Radioisotope Power Systems Reference Book for Mission Designers and Planners Radioisotope Power System Program Office Young Lee Brian Bairstow Jet Propulsion Laboratory National Aeronautics and Space Administration Jet Propulsion Laboratory California Institute of Technology Pasadena, California September 2015 This document was generated by the Jet Propulsion Laboratory, California Institute of Technology, under a contract with the National Aeronautics and Space Administration. It summarizes research carried out at Jet propulsion Laboratory and by Glenn Research Center. For both facilities, funding was provided by the NASA Radioisotope Power Systems (RPS) Program Office at Glenn Research Center. Reference herein to any specific commercial product, process, or service by trade name, trademark, manufacturer, or otherwise, does not constitute or imply its endorsement by the United States Government or the Jet Propulsion Laboratory, California Institute of Technology. © 2015 California Institute of Technology. Government sponsorship acknowledged. Abstract The RPS Program’s Program Planning and Assessment (PPA) Office commissioned the Mission Analysis team to develop the Radioisotope Power Systems (RPS) Reference Book for Mission Planners and Designers to define a baseline of RPS technology capabilities with specific emphasis on performance parameters and technology readiness. The main objective of this book is to provide RPS technology information that could be utilized by future mission concept studies and concurrent engineering practices. -

Workshop Report
WORKSHOP REPORT July 2019 Contents Page EXECUTIVE SUMMARY AND RECOMMENDATIONS 2 WORKSHOP SUMMARY 5 Workshop Purpose and Scope 5 Background and Objectives 5 Workshop Agenda 6 Overview of Lunar Day/Night Environmental Conditions 7 Lessons Learned From Missions That Have Survived Lunar Night 8 Science Perspective 9 Exploration Perspective 10 Evolving Requirements from Survival to Continuous Operations for Science, 11 Exploration, and Commercial Activities Power Generation, Storage and Distribution - State of the Art, Potential 13 Solutions, and Technology Gaps Thermal Management Systems, Strategies, and Component Design Features - 16 State of the Art, Potential Solutions, and Technology Gaps The Economic Business Case for Creating Lunar Infrastructure Services and 18 Lunar Markets International Space University Summer Project “Lunar Night Survival” 20 Open Discussion Summary 21 APPENDIX A: Workshop Organizing Committee and Participants 23 APPENDIX B: Poster Session Participants 28 This report was compiled by Andrew Petro, based on workshop notes prepared by Anna Schonwald and Chris Britt and additional notes provided by Renee Weber, Jeff Sheehy, Allison Zuniga, and Lee Mason. 1 Survive and Operate Through the Lunar Night WORKSHOP REPORT June 2019 EXECUTIVE SUMMARY AND RECOMMENDATIONS The lunar day/night cycle, which at most locations on the Moon, includes fourteen Earth days of continuous sunlight followed by fourteen days of continuous darkness and extreme cold presents one of the most demanding environmental challenge that will be faced in the exploration of the solar system. Due to the lack of a moderating atmosphere, temperatures on the lunar surface can range from as high as +120 C during the day to as low as -180 C during the night. -

Programmatic Environmental Assessment of Launches Involving Radioisotope Heater Units (Rhus)
National Aeronautics and Space Administration FINAL Programmatic Environmental Assessment of Launches Involving Radioisotope Heater Units (RHUs) January 2020 Science Mission Directorate National Aeronautics and Space Administration Washington, DC 20546 www.nasa.gov NATIONAL AERONAUTICS AND SPACE ADMINISTRATION ACTION: Finding ofNo Significant Impact (FONSI) SUMMARY: Pursuant to the National Environmental Policy Act (NEPA), as amended, the Council on Environmental Quality Regulations for Implementing the Procedural Provisions of NEPA, and NASA's NEPA policy and procedures, NASA has made a Finding ofNo Significant Impact (FONSI) with respect to the use ofradioisotope heater units (RHUs) in spacecraft launched from Kennedy Space Center (KSC) and Cape Canaveral Air Force Station (CCAFS) in Brevard County, Florida. NASA is the lead federal agency for this action, with the U.S. Department ofEnergy, the U.S. Air Force, and the Federal Aviation Administration serving as cooperating agencies. NASA has prepared a Final Programmatic Environmental Assessment (PEA) ofLaunches Involving RHUs. ADDRESSES: The Final PEA, which serves as the basis for this FONSI, may be viewed at https://www.nasa.gov/emd/nepa-public-reviews or at the following locations: 1. Central Brevard Library and Reference Center, 308 Forrest Ave., Cocoa, Florida 2. Cocoa Beach Public Library, 550 N Brevard Ave., Cocoa Beach, Florida 3. Melbourne Library, 540 E Fee Ave., Melbourne, Florida 4. Merritt Island Public Library, 1195 N Courtenay Pkwy., Merritt Island, Florida 5. Port St John Public Library, 6500 Carole Ave., Cocoa, Florida 6. Titusville Public Library, 2121 S Hopkins Ave., Titusville, Florida 7. Satellite Beach Public Library, 751 Jamaica Blvd., Satellite Beach, Florida 8. NASA Headquarters Library, 300 E Street SW (East Lobby - Room 1120), Washington, DC SUPPLEMENTARY INFORMATION: Public Involvement NASA solicited public and agency review and comment on the environmental impacts of the Proposed Action through the following methods: ·1. -

NEWSLETTER Issue No. 5 October 2015
NEWSLETTER October 2015 Issue no. 5 University of Birmingham’s Cyclotron Hinkley Point ‘C’ (artists impression) New Horizons (Image courtesy of NASA) See (www.iop.org) for further details Nuclear Industry Group newsletter October 2015 Contents Notes from the chair ..................................................................................................................... 2 Nuclear Industry Group Prizes 2015 ............................................................................................ 4 Committee Elections .................................................................................................................... 5 Meet the new Committee members ............................................................................................. 7 IOP Group Officers Forum ........................................................................................................... 8 IOP Groups Committee ................................................................................................................. 8 The Role of NNL in the Nuclear Indusary .................................................................................... 8 Radiation metrology for the nuclear industries .......................................................................... 9 Relations with the Nuclear Institute ........................................................................................... 10 NIRAB/NIRO ............................................................................................................................... -

Space Power Heritage Study Final Results
https://ntrs.nasa.gov/search.jsp?R=20190001451 2019-06-05T20:44:12+00:00Z NASA/CR—2019-220039 ATR–2018–02688 Space Power Heritage Study Final Results Marc R. Hayhurst, Robert E. Bitten, and Eric M. Mahr Aerospace Corporation, El Segundo, California Vincent J. Bilardo, Jr. Aerospace Corporation, Cleveland, Ohio February 2019 NASA STI Program . in Profi le Since its founding, NASA has been dedicated • CONTRACTOR REPORT. Scientifi c and to the advancement of aeronautics and space science. technical fi ndings by NASA-sponsored The NASA Scientifi c and Technical Information (STI) contractors and grantees. Program plays a key part in helping NASA maintain this important role. • CONFERENCE PUBLICATION. Collected papers from scientifi c and technical conferences, symposia, seminars, or other The NASA STI Program operates under the auspices meetings sponsored or co-sponsored by NASA. of the Agency Chief Information Offi cer. It collects, organizes, provides for archiving, and disseminates • SPECIAL PUBLICATION. Scientifi c, NASA’s STI. The NASA STI Program provides access technical, or historical information from to the NASA Technical Report Server—Registered NASA programs, projects, and missions, often (NTRS Reg) and NASA Technical Report Server— concerned with subjects having substantial Public (NTRS) thus providing one of the largest public interest. collections of aeronautical and space science STI in the world. Results are published in both non-NASA • TECHNICAL TRANSLATION. English- channels and by NASA in the NASA STI Report language translations of foreign scientifi c and Series, which includes the following report types: technical material pertinent to NASA’s mission. • TECHNICAL PUBLICATION. Reports of For more information about the NASA STI completed research or a major signifi cant phase program, see the following: of research that present the results of NASA programs and include extensive data or theoretical • Access the NASA STI program home page at analysis. -
Americium-241 Radioisotope Thermoelectric Generator Development for Space Applications
2013 International Nuclear Atlantic Conference - INAC 2013 Recife, PE, Brazil, November 24-29, 2013 ASSOCIAÇÃO BRASILEIRA DE ENERGIA NUCLEAR - ABEN ISBN: 978-85-99141-05-2 AMERICIUM-241 RADIOISOTOPE THERMOELECTRIC GENERATOR DEVELOPMENT FOR SPACE APPLICATIONS Richard Ambrosi1, Hugo Williams1, Piyal Samara-Ratna1, Kevin Tomkins2, Stephen Pulker2, Richard Slade2, Nigel Bannister1, Keith Stephenson3, Kevin Simpson4, Mark Robbins4, Ismini Dimitriadou4, Mike Reece5, Huanpo Ning5, Kan Chen5, Marie-Claire Perkinson2, Jonathan Sykes1, Tom Rice6, Tim Tinsley6, Mark Sarsfield6, David Vernon1, Tony Crawford1, Matthew Stuttard2, Jan Koenig7, Martin Jaegle7 1 University of Leicester Department of Physics and Astronomy, University Rd Leicester, LE1 7RH United Kingdom [email protected] 2 Astrium Ltd Gunnels Wood Rd, Stevenage, SG1 2AS United Kingdom 3 European Space Agency, ESTEC TEC-EP, PO Box 299 - 2200 AG Noordwijk, The Netherlands 4 European Thermodynamics Ltd, Wistow, Kibworth, Leicester, LE8 0RX United Kingdom 5 Queen Mary University of London, School of Engineering and Materials Science, Mile End Rd, London, E1 4NS United Kingdom 6 National Nuclear Laboratory, Sellafield, Seascale Cumbria, CA20 1PG United Kingdom 7 Fraunhofer IPM, Heidenhofstraße 8, 79110 Freiburg, Germany ABSTRACT Space nuclear power systems are under development in the UK in collaboration with European partners as part of a European Space Agency (ESA) programme. Radioisotope thermoelectric generators (RTG) are an important element of this new capability in Europe. RTG systems being developed in Europe are targeting the 10 W electric to 50 W electric power generation range adopting a modular scalable approach to the design. Radiogenic decay heat from radioisotopes can be converted to electrical power by using appropriate semiconductor based thermoelectric materials. -

Isotope Power System Development at the European Commission's Joint
atw Vol. 65 (2020) | Issue 4 ı April Serial | Major Trends in Energy Policy and Nuclear Power Research in Support of European Radio- 198 isotope Power System Development at the European Commission’s Joint Research Centre in Karlsruhe Daniel Freis, Jean-François Vigier, Karin Popa and Rudy J.M. Konings 1 Introduction The urge to discover the unknown, to explore the unexplored and to broaden our knowledge beyond the limits of the present is inherent to human nature. One of the most interesting and fascinating fields of science is the exploration of the cosmos, either from Earth using telescopes or by sending automated probes to other planets and into the vastness of space. scientific instruments on the Moon enables long-lasting missions [20]. (Figure 1), and they were used for Unfortunately, there is a global many of the most famous and exiting shortage of this isotope, the efforts exploratory endeavours, such as associated with its production are the Pioneer missions to Saturn and high [21] and there are currently no Jupiter [9,10], the Viking missions to facilities for its synthesis in Europe. Mars [11], and the Voyager 1 & 2 An alternative is the americium spacecraft, which travelled beyond isotope Am-241, which is more easily the boundaries of our solar system available, since it is produced through and are still delivering scientific decay from Pu-241 and can be results from the interstellar medium, extracted isotopically pure from more than 40 years after their launch existing stocks of civil plutonium in [12,13]. More recently, the radio- France or the United Kingdom via isotope- powered missions Galileo, chemical extraction [22]. -

Marsfast Assessment of an ESA Fast Mobility Mars Rover
CDF STUDY REPORT MarsFAST Assessment of an ESA Fast Mobility Mars Rover CDF-148(C)Public October 2014 MarsFAST CDF Study Report: CDF-148(C)Public October 2014 page 1 of 224 CDF Study Report MarsFAST Assessment of an ESA Fast Mobility Mars Rover ESA UNCLASSIFIED – Releasable to the Public MarsFAST CDF Study Report: CDF-148(C)Public October 2014 page 2 of 224 This study is based on the ESA CDF Integrated Design Model (IDM), which is copyright 2004 – 2014 by ESA. All rights reserved. Further information and/or additional copies of the report can be requested from: D. Rebuffat ESA/ESTEC/SRE-FMP Postbus 299 2200 AG Noordwijk The Netherlands Tel: +31-(0)71-5655174 Fax: +31-(0)71-5655985 [email protected] For further information on the Concurrent Design Facility please contact: M. Bandecchi ESA/ESTEC/TEC-SYE Postbus 299 2200 AG Noordwijk The Netherlands Tel: +31-(0)71-5653701 Fax: +31-(0)71-5656024 [email protected] FRONT COVER Study Logo showing SkyCrane delivering a Rover to the Mars Surface ESA UNCLASSIFIED – Releasable to the Public MarsFAST CDF Study Report: CDF-148(C)Public October 2014 page 3 of 224 STUDY TEAM This study was performed in the ESTEC Concurrent Design Facility (CDF) by the following interdisciplinary team: TEAM LEADER COMMUNICATIONS POWER CONFIGURATION PROGRAMMATICS/ AIV COST RISK DATA HANDLING MISSION ANALYSIS GS&OPS STRUCTURES ROBOTICS SYSTEMS MECHANISMS THERMAL PAYLOAD Team Composition Removed From This Version of the Report ESA UNCLASSIFIED – Releasable to the Public MarsFAST CDF Study Report: CDF-148(C)Public October 2014 page 4 of 224 This Page Intentionally Blank ESA UNCLASSIFIED – Releasable to the Public MarsFAST CDF Study Report: CDF-148(C)Public October 2014 page 5 of 224 TABLE OF CONTENTS 1 INTRODUCTION ................................................................................. -
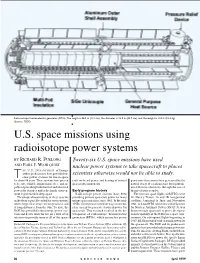
U.S. Space Missions Using Radioisotope Power Systems
Radioisotope thermoelectric generator (RTG). The length is 44.5 in (113 cm), the diameter is 16.8 in (42.7 cm), and the weight is 124 lb (56.2 kg). (Source: DOE) U.S. space missions using radioisotope power systems BY RICHARD R. FURLONG Twenty-six U.S. space missions have used AND EARL J. WAHLQUIST nuclear power systems to take spacecraft to places HE U.S. DEPARTMENT of Energy and its predecessors have provided nu- scientists otherwise would not be able to study. T clear power systems for use in space for about 38 years. These systems have proven craft on-board power and heating of critical generators that convert heat generated by the to be safe, reliable, maintenance-free, and ca- spacecraft components. natural decay of a radioisotope fuel (plutoni- pable of providing both thermal and electrical um-238) into electricity through the use of power for decades under the harsh environ- Early program history thermoelectric couples. ment experienced in deep space. Radioisotope power systems have been The first two space flights with RTGs were The unique characteristics of these systems providing primary spacecraft power for many the Navy’s Transit 4A and 4B navigational make them especially suited for environments unique space missions since 1961. In the mid- satellites, launched in June and November where large solar arrays are not practical, and 1950s, research was started on ways to use nu- 1961. A 3-watt RTG, which was called Systems at long distances from the Sun. To date, the clear energy to generate electrical power for for Nuclear Auxiliary Power (SNAP-3), was DOE has provided radioisotope power sys- spacecraft. -

Encapsulated in Platinum Metal Alloys CASSINI MISSION to STUDY SATURN and ITS MOONS by E
Long Life Radioisotopic Power Sources Encapsulated in Platinum Metal Alloys CASSINI MISSION TO STUDY SATURN AND ITS MOONS By E. A. Franco-Ferreira and G. M. Goodwin Oak Ridge National Laboratory, Tennessee, U.S.A. and T. G. George and G. H. Rinehart Los Alamos National Laboratory, New Mexico, U.S.A. The platinum metals alloys, DOP-26 iridium and platinum-30 per cent rhodium, have been successfully used to encapsulate plutonia fuel pellets for the Cassini Spacecraft. The iridium-encapsulated heat sources provide approx- imately 900 watts of electrical power for the spacecraft and its experiments, whereas the platinum alloy clad pellets will supply about 150 watts of heat to various parts of the spacecraft and its lunar probe, Huygens. The particular alloys used on this mission have been selected to fulfil the critical function of maintaining fuel containment during normal service and for projected malfunction or accident scenarios. Their ability to perform satisfactorily has been demonstrated through extensive testing of their mechanical, physical and impact properties. The Cassini heat source manufacturing yields were significantly higher than those obtained for previous missions. The last NASA grand-scale interplanetary other object in the solar system which has a voyage of this century, the Cassini/Huygens liquid and solid surface with shorelines (5). Mission, is scheduled to be launched during a Electrical power for the eighteen science insuu- window which occurs between October 6th and ments and forty-four on-board processors (4) 30th, 1997 (1-3). The mission is a joint U.S.- will be supplied by three Radioisotope Thermo- European close-up study of Saturn and its electric Generators (RTGs) which are powered moons. -

There Are Only Three Possible Sources of Energy Which Can Be Used to Generate Electricity in Space – Chemical, Nuclear, Or Solar
“ There are only three possible sources of energy which can be used to generate electricity in space – chemical, nuclear, or solar. Each energy source, . has its own intrinsic characteristics, and their differences determine which source is uniquely the best for a specific mission.” Systems for Nuclear Auxiliary Power…A Report by the Commission – 1964 viii The Early Years Space Nuclear Power 1 Systems Take Flight nly a few years separate the operation of mankind’s first nuclear reactor at the University of Chicago in 19421 and the first U.S. research on the use of nuclear power in space. Shortly after the Oend of World War II, control of atomic energy was transferred from military to civilian hands when Congress enacted the Atomic Energy Act of 1946.2 e Act created the Atomic Energy Commission (AEC), which began operation on January 1, 1947. Although responsibility for atomic energy development was now under the new civilian agency, its development continued to remain tied to military purposes. By the late 1940s and early 1950s, studies by the AEC and the Department of Defense (DoD) began to show that the energy generated from the decay of radioisotopes and the process of nuclear fission held much promise for uses other than atomic weapons. Performed against the backdrop of the early days of the Cold War between the United States and the Soviet Union, in which each country sought military and technological prowess over the other, those studies envisioned radioisotope and reactor power for military reconnaissance satellites and a nuclear reactor propulsion system for intercontinental ballistic missiles.