View-Dependent Culling of Dynamic Systems in Virtual Environments
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Chapter 6: Ensemble Forecasting and Atmospheric Predictability
Chapter 6: Ensemble Forecasting and Atmospheric Predictability Introduction Deterministic Chaos (what!?) In 1951 Charney indicated that forecast skill would break down, but he attributed it to model errors and errors in the initial conditions… In the 1960’s the forecasts were skillful for only one day or so. Statistical prediction was equal or better than dynamical predictions, Like it was until now for ENSO predictions! Lorenz wanted to show that statistical prediction could not match prediction with a nonlinear model for the Tokyo (1960) NWP conference So, he tried to find a model that was not periodic (otherwise stats would win!) He programmed in machine language on a 4K memory, 60 ops/sec Royal McBee computer He developed a low-order model (12 d.o.f) and changed the parameters and eventually found a nonperiodic solution Printed results with 3 significant digits (plenty!) Tried to reproduce results, went for a coffee and OOPS! Lorenz (1963) discovered that even with a perfect model and almost perfect initial conditions the forecast loses all skill in a finite time interval: “A butterfly in Brazil can change the forecast in Texas after one or two weeks”. In the 1960’s this was only of academic interest: forecasts were useless in two days Now, we are getting closer to the 2 week limit of predictability, and we have to extract the maximum information Central theorem of chaos (Lorenz, 1960s): a) Unstable systems have finite predictability (chaos) b) Stable systems are infinitely predictable a) Unstable dynamical system b) Stable dynamical -

A Gentle Introduction to Dynamical Systems Theory for Researchers in Speech, Language, and Music
A Gentle Introduction to Dynamical Systems Theory for Researchers in Speech, Language, and Music. Talk given at PoRT workshop, Glasgow, July 2012 Fred Cummins, University College Dublin [1] Dynamical Systems Theory (DST) is the lingua franca of Physics (both Newtonian and modern), Biology, Chemistry, and many other sciences and non-sciences, such as Economics. To employ the tools of DST is to take an explanatory stance with respect to observed phenomena. DST is thus not just another tool in the box. Its use is a different way of doing science. DST is increasingly used in non-computational, non-representational, non-cognitivist approaches to understanding behavior (and perhaps brains). (Embodied, embedded, ecological, enactive theories within cognitive science.) [2] DST originates in the science of mechanics, developed by the (co-)inventor of the calculus: Isaac Newton. This revolutionary science gave us the seductive concept of the mechanism. Mechanics seeks to provide a deterministic account of the relation between the motions of massive bodies and the forces that act upon them. A dynamical system comprises • A state description that indexes the components at time t, and • A dynamic, which is a rule governing state change over time The choice of variables defines the state space. The dynamic associates an instantaneous rate of change with each point in the state space. Any specific instance of a dynamical system will trace out a single trajectory in state space. (This is often, misleadingly, called a solution to the underlying equations.) Description of a specific system therefore also requires specification of the initial conditions. In the domain of mechanics, where we seek to account for the motion of massive bodies, we know which variables to choose (position and velocity). -

An Image Cryptography Using Henon Map and Arnold Cat Map
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056 Volume: 05 Issue: 04 | Apr-2018 www.irjet.net p-ISSN: 2395-0072 An Image Cryptography using Henon Map and Arnold Cat Map. Pranjali Sankhe1, Shruti Pimple2, Surabhi Singh3, Anita Lahane4 1,2,3 UG Student VIII SEM, B.E., Computer Engg., RGIT, Mumbai, India 4Assistant Professor, Department of Computer Engg., RGIT, Mumbai, India ---------------------------------------------------------------------***--------------------------------------------------------------------- Abstract - In this digital world i.e. the transmission of non- 2. METHODOLOGY physical data that has been encoded digitally for the purpose of storage Security is a continuous process via which data can 2.1 HENON MAP be secured from several active and passive attacks. Encryption technique protects the confidentiality of a message or 1. The Henon map is a discrete time dynamic system information which is in the form of multimedia (text, image, introduces by michel henon. and video).In this paper, a new symmetric image encryption 2. The map depends on two parameters, a and b, which algorithm is proposed based on Henon’s chaotic system with for the classical Henon map have values of a = 1.4 and byte sequences applied with a novel approach of pixel shuffling b = 0.3. For the classical values the Henon map is of an image which results in an effective and efficient chaotic. For other values of a and b the map may be encryption of images. The Arnold Cat Map is a discrete system chaotic, intermittent, or converge to a periodic orbit. that stretches and folds its trajectories in phase space. Cryptography is the process of encryption and decryption of 3. -

WHAT IS a CHAOTIC ATTRACTOR? 1. Introduction J. Yorke Coined the Word 'Chaos' As Applied to Deterministic Systems. R. Devane
WHAT IS A CHAOTIC ATTRACTOR? CLARK ROBINSON Abstract. Devaney gave a mathematical definition of the term chaos, which had earlier been introduced by Yorke. We discuss issues involved in choosing the properties that characterize chaos. We also discuss how this term can be combined with the definition of an attractor. 1. Introduction J. Yorke coined the word `chaos' as applied to deterministic systems. R. Devaney gave the first mathematical definition for a map to be chaotic on the whole space where a map is defined. Since that time, there have been several different definitions of chaos which emphasize different aspects of the map. Some of these are more computable and others are more mathematical. See [9] a comparison of many of these definitions. There is probably no one best or correct definition of chaos. In this paper, we discuss what we feel is one of better mathematical definition. (It may not be as computable as some of the other definitions, e.g., the one by Alligood, Sauer, and Yorke.) Our definition is very similar to the one given by Martelli in [8] and [9]. We also combine the concepts of chaos and attractors and discuss chaotic attractors. 2. Basic definitions We start by giving the basic definitions needed to define a chaotic attractor. We give the definitions for a diffeomorphism (or map), but those for a system of differential equations are similar. The orbit of a point x∗ by F is the set O(x∗; F) = f Fi(x∗) : i 2 Z g. An invariant set for a diffeomorphism F is an set A in the domain such that F(A) = A. -

Thermodynamic Properties of Coupled Map Lattices 1 Introduction
Thermodynamic properties of coupled map lattices J´erˆome Losson and Michael C. Mackey Abstract This chapter presents an overview of the literature which deals with appli- cations of models framed as coupled map lattices (CML’s), and some recent results on the spectral properties of the transfer operators induced by various deterministic and stochastic CML’s. These operators (one of which is the well- known Perron-Frobenius operator) govern the temporal evolution of ensemble statistics. As such, they lie at the heart of any thermodynamic description of CML’s, and they provide some interesting insight into the origins of nontrivial collective behavior in these models. 1 Introduction This chapter describes the statistical properties of networks of chaotic, interacting el- ements, whose evolution in time is discrete. Such systems can be profitably modeled by networks of coupled iterative maps, usually referred to as coupled map lattices (CML’s for short). The description of CML’s has been the subject of intense scrutiny in the past decade, and most (though by no means all) investigations have been pri- marily numerical rather than analytical. Investigators have often been concerned with the statistical properties of CML’s, because a deterministic description of the motion of all the individual elements of the lattice is either out of reach or uninteresting, un- less the behavior can somehow be described with a few degrees of freedom. However there is still no consistent framework, analogous to equilibrium statistical mechanics, within which one can describe the probabilistic properties of CML’s possessing a large but finite number of elements. -

Nonlinear Dynamics and Entropy of Complex Systems with Hidden and Self-Excited Attractors
entropy Editorial Nonlinear Dynamics and Entropy of Complex Systems with Hidden and Self-Excited Attractors Christos K. Volos 1,* , Sajad Jafari 2 , Jacques Kengne 3 , Jesus M. Munoz-Pacheco 4 and Karthikeyan Rajagopal 5 1 Laboratory of Nonlinear Systems, Circuits & Complexity (LaNSCom), Department of Physics, Aristotle University of Thessaloniki, Thessaloniki 54124, Greece 2 Nonlinear Systems and Applications, Faculty of Electrical and Electronics Engineering, Ton Duc Thang University, Ho Chi Minh City 700000, Vietnam; [email protected] 3 Department of Electrical Engineering, University of Dschang, P.O. Box 134 Dschang, Cameroon; [email protected] 4 Faculty of Electronics Sciences, Autonomous University of Puebla, Puebla 72000, Mexico; [email protected] 5 Center for Nonlinear Dynamics, Institute of Research and Development, Defence University, P.O. Box 1041 Bishoftu, Ethiopia; [email protected] * Correspondence: [email protected] Received: 1 April 2019; Accepted: 3 April 2019; Published: 5 April 2019 Keywords: hidden attractor; complex systems; fractional-order; entropy; chaotic maps; chaos In the last few years, entropy has been a fundamental and essential concept in information theory. It is also often used as a measure of the degree of chaos in systems; e.g., Lyapunov exponents, fractal dimension, and entropy are usually used to describe the complexity of chaotic systems. Thus, it will be important to study entropy in nonlinear systems. Additionally, there has been an increasing interest in a new classification of nonlinear dynamical systems including two kinds of attractors: self-excited attractors and hidden attractors. Self-excited attractors can be localized straightforwardly by applying a standard computational procedure. -

Chaos: the Mathematics Behind the Butterfly Effect
Chaos: The Mathematics Behind the Butterfly E↵ect James Manning Advisor: Jan Holly Colby College Mathematics Spring, 2017 1 1. Introduction A butterfly flaps its wings, and a hurricane hits somewhere many miles away. Can these two events possibly be related? This is an adage known to many but understood by few. That fact is based on the difficulty of the mathematics behind the adage. Now, it must be stated that, in fact, the flapping of a butterfly’s wings is not actually known to be the reason for any natural disasters, but the idea of it does get at the driving force of Chaos Theory. The common theme among the two is sensitive dependence on initial conditions. This is an idea that will be revisited later in the paper, because we must first cover the concepts necessary to frame chaos. This paper will explore one, two, and three dimensional systems, maps, bifurcations, limit cycles, attractors, and strange attractors before looking into the mechanics of chaos. Once chaos is introduced, we will look in depth at the Lorenz Equations. 2. One Dimensional Systems We begin our study by looking at nonlinear systems in one dimen- sion. One of the important features of these is the nonlinearity. Non- linearity in an equation evokes behavior that is not easily predicted due to the disproportionate nature of inputs and outputs. Also, the term “system”isoftenamisnomerbecauseitoftenevokestheideaof asystemofequations.Thiswillbethecaseaswemoveourfocuso↵ of one dimension, but for now we do not want to think of a system of equations. In this case, the type of system we want to consider is a first-order system of a single equation. -
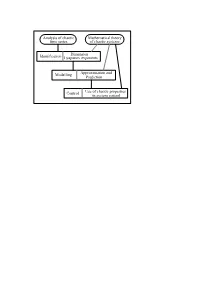
Analysis of Chaotic Time Series Mathematical Theory of Chaotic
Analysis of chaotic Mathematical theory time series of chaotic systems Dimension Identification Lyapunov exponents Approximation and Modelling Prediction Control Use of chaotic properties in system control Chaotic time series Part I Estimation of invariant prop eries in state space y D Kugiumtzis B Lillekjendlie N Christophersen y January Abs tra ct Certain deterministic nonlinear systems may show chaotic b ehaviour Time series de rived from such systems seem sto chastic when analyzed with linear techniques However uncovering the deterministic structure is important because it allows for construction of more realistic and better models and thus improved predictive capabilities This pap er describ es key features of chaotic systems including strange attractors and Lyapunov expo nents The emphasis is on state space reconstruction techniques that are used to estimate these properties given scalar observations Data generated from equations known to display chaotic behaviour are used for illustration A compilation of applications to real data from widely dierent elds is given If chaos is found to b e present one may proceed to build nonlinear models which is the topic of the second pap er in this series Intro du ct ion Chaotic behaviour in deterministic dynamical systems is an intrinsicly nonlinear phenomenon A characteristic feature of chaotic systems is an extreme sensitivity to changes in initial con ditions while the dynamics at least for socalled dissipative systems is still constrained to a nite region of state space called a strange -

Random Boolean Networks As a Toy Model for the Brain
UNIVERSITY OF GENEVA SCIENCE FACULTY VRIJE UNIVERSITEIT OF AMSTERDAM PHYSICS SECTION Random Boolean Networks as a toy model for the brain MASTER THESIS presented at the science faculty of the University of Geneva for obtaining the Master in Theoretical Physics by Chlo´eB´eguin Supervisor (VU): Pr. Greg J Stephens Co-Supervisor (UNIGE): Pr. J´er^ome Kasparian July 2017 Contents Introduction1 1 Biology, physics and the brain4 1.1 Biological description of the brain................4 1.2 Criticality in the brain......................8 1.2.1 Physics reminder..................... 10 1.2.2 Experimental evidences.................. 15 2 Models of neural networks 20 2.1 Classes of models......................... 21 2.1.1 Spiking models...................... 21 2.1.2 Rate-based models.................... 23 2.1.3 Attractor networks.................... 24 2.1.4 Links between the classes of models........... 25 2.2 Random Boolean Networks.................... 28 2.2.1 General definition..................... 28 2.2.2 Kauffman network.................... 30 2.2.3 Hopfield network..................... 31 2.2.4 Towards a RBN for the brain.............. 32 2.2.5 The model......................... 33 3 Characterisation of RBNs 34 3.1 Attractors............................. 34 3.2 Damage spreading........................ 36 3.3 Canonical specific heat...................... 37 4 Results 40 4.1 One population with Gaussian weights............. 40 4.2 Dale's principle and balance of inhibition - excitation..... 46 4.3 Lognormal distribution of the weights.............. 51 4.4 Discussion............................. 55 i 5 Conclusion 58 Bibliography 60 Acknowledgements 66 A Python Code 67 A.1 Dynamics............................. 67 A.2 Attractor search.......................... 69 A.3 Hamming Distance........................ 73 A.4 Canonical specific heat..................... -

January 3, 2019 Dynamical Systems B. Solomyak LECTURE 11
January 3, 2019 Dynamical Systems B. Solomyak LECTURE 11 SUMMARY 1. Hyperbolic toral automorphisms (cont.) d d d Let A be d × d integer matrix, with det A = ±1. Consider T = R =Z (the d- dimensional torus). d Definition 1.1. The map TA(x) = Ax (mod Z ) is called the toral automorphism asso- ciated with A. d Proposition 1.2. TA is a group automorphism; in fact, every automorphism of T has such a form. Definition 1.3. The automorphism is called hyperbolic if A is hyperbolic, that is, A has no eigenvalues of absolute value one. " # 2 1 Example 1.4 (Arnold's \cat map"). This is TA for A = . 1 1 Theorem 1.5 (see [1, x2.4]). Every hyperbolic toral automorphism is chaotic. We will see the proof for d = 2, for simplicity, following [1, 2]. The proof will be broken into lemmas. The first one was already covered on December 27. m n 2 Lemma 1.6. The points with rational coordinates f( k ; k ); m; n; k 2 Ng (mod Z ) are 2 dense in T , and they are all periodic for TA. Lemma 1.7. Let A be a hyperbolic 2×2 matrix. Thus it has two real eigenvalues: jλ1j > 1 and jλ2j < 1. Then the eigenvalues are irrational and the eigenvectors have irrational slopes. Let Es, Eu be the stable and unstable subspaces for A, respectively; they are one- dimensional and are spanned by the eigenvectors. s u Consider the point 0 = (0; 0) on the torus; it is fixed by TA. -

THE BUTTERFLY EFFECT Étienne GHYS CNRS-UMPA ENS Lyon [email protected]
12th International Congress on Mathematical Education Program Name XX-YY-zz (pp. abcde-fghij) 8 July – 15 July, 2012, COEX, Seoul, Korea (This part is for LOC use only. Please do not change this part.) THE BUTTERFLY EFFECT Étienne GHYS CNRS-UMPA ENS Lyon [email protected] It is very unusual for a mathematical idea to disseminate into the society at large. An interesting example is chaos theory, popularized by Lorenz’s butterfly effect: “does the flap of a butterfly’s wings in Brazil set off a tornado in Texas?” A tiny cause can generate big consequences! Can one adequately summarize chaos theory in such a simple minded way? Are mathematicians responsible for the inadequate transmission of their theories outside of their own community? What is the precise message that Lorenz wanted to convey? Some of the main characters of the history of chaos were indeed concerned with the problem of communicating their ideas to other scientists or non-scientists. I’ll try to discuss their successes and failures. The education of future mathematicians should include specific training to teach them how to explain mathematics outside their community. This is more and more necessary due to the increasing complexity of mathematics. A necessity and a challenge! INTRODUCTION In 1972, the meteorologist Edward Lorenz gave a talk at the 139th meeting of the American Association for the Advancement of Science entitled “Does the flap of a butterfly’s wings in Brazil set off a tornado in Texas?”. Forty years later, a google search “butterfly effect” generates ten million answers. -

Fractal-Bits
fractal-bits Claude Heiland-Allen 2012{2019 Contents 1 buddhabrot/bb.c . 3 2 buddhabrot/bbcolourizelayers.c . 10 3 buddhabrot/bbrender.c . 18 4 buddhabrot/bbrenderlayers.c . 26 5 buddhabrot/bound-2.c . 33 6 buddhabrot/bound-2.gnuplot . 34 7 buddhabrot/bound.c . 35 8 buddhabrot/bs.c . 36 9 buddhabrot/bscolourizelayers.c . 37 10 buddhabrot/bsrenderlayers.c . 45 11 buddhabrot/cusp.c . 50 12 buddhabrot/expectmu.c . 51 13 buddhabrot/histogram.c . 57 14 buddhabrot/Makefile . 58 15 buddhabrot/spectrum.ppm . 59 16 buddhabrot/tip.c . 59 17 burning-ship-series-approximation/BossaNova2.cxx . 60 18 burning-ship-series-approximation/BossaNova.hs . 81 19 burning-ship-series-approximation/.gitignore . 90 20 burning-ship-series-approximation/Makefile . 90 21 .gitignore . 90 22 julia/.gitignore . 91 23 julia-iim/julia-de.c . 91 24 julia-iim/julia-iim.c . 94 25 julia-iim/julia-iim-rainbow.c . 94 26 julia-iim/julia-lsm.c . 98 27 julia-iim/Makefile . 100 28 julia/j-render.c . 100 29 mandelbrot-delta-cl/cl-extra.cc . 110 30 mandelbrot-delta-cl/delta.cl . 111 31 mandelbrot-delta-cl/Makefile . 116 32 mandelbrot-delta-cl/mandelbrot-delta-cl.cc . 117 33 mandelbrot-delta-cl/mandelbrot-delta-cl-exp.cc . 134 34 mandelbrot-delta-cl/README . 139 35 mandelbrot-delta-cl/render-library.sh . 142 36 mandelbrot-delta-cl/sft-library.txt . 142 37 mandelbrot-laurent/DM.gnuplot . 146 38 mandelbrot-laurent/Laurent.hs . 146 39 mandelbrot-laurent/Main.hs . 147 40 mandelbrot-series-approximation/args.h . 148 41 mandelbrot-series-approximation/emscripten.cpp . 150 42 mandelbrot-series-approximation/index.html .