A Study of Active Engine Mounts
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Animafluid: a Dynamic Liquid Interface
Animafluid: A Dynamic Liquid Interface Muhammad Ali Hashmi Heamin Kim Abstract 75 Amherst St. 75 Amherst St. In this paper the authors describe a new tangible liquid interface based on ferromagnetic fluid. Our interface Cambridge, Cambridge, combines properties of both liquid and magnetism in a MA 02139 USA MA 02139 USA single interface which allows the user to directly [email protected] [email protected] interact with the liquid interface. Our dynamic liquid interface, which we call Animafluid, uses the physical Artem Dementyev Amir Lazarovich qualities of ferromagnetic fluids in combination with 75 Amherst St. 75 Amherst St. pressure sensors, microcontrollers for real-time Cambridge, Cambridge, interaction that combines both physical input and output. Our implementation is different from existing MA 02139 USA MA 02139 USA ferrofluid interventions and projects that harness [email protected] [email protected] magnetic liquid properties of ferromagnetic fluids in the sense that it adds tangibility of radical atoms design methodology to ferromagnetic fluids, thereby changing Hye Soo Yang the scope of interaction with the ferromagnetic fluid in 75 Amherst St. a drastic manner. Cambridge, MA 02139 USA Author Keywords [email protected] Tangible Interface; Ferrofluid; Dynamic Liquid Interface; Radical Atoms; Programmable Materiality ACM Classification Keywords H.5.2. Information interfaces and Presentation; User Interfaces Introduction Copyright is held by the author/owner(s). Ferromagnetic liquid is a material that has magnetic CHI’13, April 27 – May 2, 2013, Paris, France. and liquid properties. Ferromagnetic fluids have been used in a variety of different ways in the field of fluid dynamics. Our implementation imparts tangibility to the Prior Work liquid interface thus providing the design features of Our work is informed by prior work done on “Radical Atoms”, which envisions human interactions electromagnets-based interfaces and ferromagnetic with dynamic materials in a computationally fluids. -

Determining the Flow Curves for an Inverse Ferrofluid
Korea-Australia Rheology Journal Vol. 20, No. 1, March 2008 pp. 35-42 Determining the flow curves for an inverse ferrofluid C. C. Ekwebelam and H. See* The School of Chemical and Biomolecular Engineering, The University of Sydney, Australia. NSW 2006 (Received Oct. 9, 2007; final revision received Jan. 30, 2008) Abstract An inverse ferrofluid composed of micron sized polymethylmethacrylate particles dispersed in ferrofluid was used to investigate the effects of test duration times on determining the flow curves of these materials under constant magnetic field. The results showed that flow curves determined using low duration times were most likely not measuring the steady state rheological response. However, at longer duration times, which are expected to correspond more to steady state behaviour, we noticed the occurrence of plateau and decreasing flow curves in the shear rate range of 0.004 s−1 to ~ 20 s−1, which suggest the presence of non- homogeneities and shear localization in the material. This behaviour was also reflected in the steady state results from shear start up tests performed over the same range of shear rates. The results indicate that care is required when interpreting flow curves obtained for inverse ferrofluids. Keywords : inverse ferrofluid, flow curve, shear localization 1. Introduction An IFF comprises a magnetisable carrier liquid, otherwise known as a ferrofluid, which is a colloidal dispersion of Field-responsive fluids are suspensions of micron-sized nano-sized magnetite particles. Into this we disperse particles which show a dramatic increase in flow resistance micron-sized non-magnetic solid particles, thereby pro- upon application of external magnetic or electrical fields. -

14Th U.S. National Congress on Computational Mechanics
14th U.S. National Congress on Computational Mechanics Montréal • July 17-20, 2017 Congress Program at a Glance Sunday, July 16 Monday, July 17 Tuesday, July 18 Wednesday, July 19 Thursday, July 20 Registration Registration Registration Registration Short Course 7:30 am - 5:30 pm 7:30 am - 5:30 pm 7:30 am - 5:30 pm 7:30 am - 11:30 am Registration 8:00 am - 9:30 am 8:30 am - 9:00 am OPENING PL: Tarek Zohdi PL: Andrew Stuart PL: Mark Ainsworth PL: Anthony Patera 9:00 am - 9.45 am Chair: J.T. Oden Chair: T. Hughes Chair: L. Demkowicz Chair: M. Paraschivoiu Short Courses 9:45 am - 10:15 am Coffee Break Coffee Break Coffee Break Coffee Break 9:00 am - 12:00 pm 10:15 am - 11:55 am Technical Session TS1 Technical Session TS4 Technical Session TS7 Technical Session TS10 Lunch Break 11:55 am - 1:30 pm Lunch Break Lunch Break Lunch Break CLOSING aSPL: Raúl Tempone aSPL: Ron Miller aSPL: Eldad Haber 1:30 pm - 2:15 pm bSPL: Marino Arroyo bSPL: Beth Wingate bSPL: Margot Gerritsen Short Courses 2:15 pm - 2:30 pm Break-out Break-out Break-out 1:00 pm - 4:00 pm 2:30 pm - 4:10 pm Technical Session TS2 Technical Session TS5 Technical Session TS8 4:10 pm - 4:40 pm Coffee Break Coffee Break Coffee Break Congress Registration 2:00 pm - 8:00 pm 4:40 pm - 6:20 pm Technical Session TS3 Poster Session TS6 Technical Session TS9 Reception Opening in 517BC Cocktail Coffee Breaks in 517A 7th floor Terrace Plenary Lectures (PL) in 517BC 7:00 pm - 7:30 pm Cocktail and Banquet 6:00 pm - 8:00 pm Semi-Plenary Lectures (SPL): Banquet in 517BC aSPL in 517D 7:30 pm - 9:30 pm Viewing of Fireworks bSPL in 516BC Fireworks and Closing Reception Poster Session in 517A 10:00 pm - 10:30 pm on 7th floor Terrace On behalf of Polytechnique Montréal, it is my pleasure to welcome, to Montreal, the 14th U.S. -

Magnetorheological Fluid and Its Applications
International Journal of Current Engineering and Technology E-ISSN 2277 – 4106, P-ISSN 2347 – 5161 ©2017 INPRESSCO®, All Rights Reserved Available at http://inpressco.com/category/ijcet Research Article Magnetorheological Fluid and its Applications Pranav Gadekar*, V.S.Kanthale and N.D.Khaire Mechanical Department, MITCOE, Pune University, Pune, Maharashtra, India Accepted 12 March 2017, Available online 16 March 2017, Special Issue-7 (March 2017) Abstract A Magneto rheological Fluid (MRF) is a Smart fluid whose viscosity can be varied by application of magnetic field. The MR Fluid has vast applications in various engineering as well as day to day life. There is huge potential that this revolutionary material will provide many leading edge applications. The fluid has applications in various fields such as automotive industry, household applications, prosthetics, civil engineering, hydraulics, brakes and clutches, etc. Also there is a possible application of the fluid in reducing the effect of Gun Recoil. This paper will describe these applications and working of proposed application. Keywords: MR Fluid, Viscosity, Dampers, Prosthetics, Gun Recoil. 1. Introduction To take full advantage of MRF technologythe base fluid must have a low viscosity and it should be constant 1 Rheos is a Greek word to Flow. Rheology is the science with temperature. This is required for variation due to if material flow under external load conditions. The applied magnetic field to be more effective than natural word Magnetorheological Fluid means fluid whose viscosity. The presences of suspended particles make apparent viscosity increases, with application of base fluid thicker. Commonly used base fluids are MAGNETIC field. Also known as MR fluids, these fluids mineral oils, hydrocarbon oils, and Silicon oils. -

Directed Assembly of Particles for Additive Manufacturing of Particle-Polymer Composites
micromachines Review Directed Assembly of Particles for Additive Manufacturing of Particle-Polymer Composites Soheila Shabaniverki 1 and Jaime J. Juárez 1,2,* 1 Department of Mechanical Engineering, Iowa State University, Ames, IA 50011, USA; [email protected] 2 Center for Multiphase Flow Research and Education, Iowa State University, Ames, IA 50011, USA * Correspondence: [email protected]; Tel.: +1-515-294-3298 Abstract: Particle-polymer dispersions are ubiquitous in additive manufacturing (AM), where they are used as inks to create composite materials with applications to wearable sensors, energy storage materials, and actuation elements. It has been observed that directional alignment of the particle phase in the polymer dispersion can imbue the resulting composite material with enhanced mechani- cal, electrical, thermal or optical properties. Thus, external field-driven particle alignment during the AM process is one approach to tailoring the properties of composites for end-use applications. This review article provides an overview of externally directed field mechanisms (e.g., electric, magnetic, and acoustic) that are used for particle alignment. Illustrative examples from the AM literature show how these mechanisms are used to create structured composites with unique properties that can only be achieved through alignment. This article closes with a discussion of how particle distribution (i.e., microstructure) affects mechanical properties. A fundamental description of particle phase transport in polymers could lead to the development of AM process control for particle-polymer composite fabrication. This would ultimately create opportunities to explore the fundamental impact that alignment has on particle-polymer composite properties, which opens up the possibility of tailoring these materials for specific applications. -
Numerical Simulations of Heat and Mass Transfer Flows Utilizing
CAPITAL UNIVERSITY OF SCIENCE AND TECHNOLOGY, ISLAMABAD Numerical Simulations of Heat and Mass Transfer Flows utilizing Nanofluid by Faisal Shahzad A thesis submitted in partial fulfillment for the degree of Doctor of Philosophy in the Faculty of Computing Department of Mathematics 2020 i Numerical Simulations of Heat and Mass Transfer Flows utilizing Nanofluid By Faisal Shahzad (DMT-143019) Dr. Noor Fadiya Mohd Noor, Assistant Professor University of Malaya, Kuala Lumpur, Malaysia (Foreign Evaluator 1) Dr. Fatma Ibrahim, Scientific Engineer Technische Universit¨atDortmund, Germany (Foreign Evaluator 2) Dr. Muhammad Sagheer (Thesis Supervisor) Dr. Muhammad Sagheer (Head, Department of Mathematics) Dr. Muhammad Abdul Qadir (Dean, Faculty of Computing) DEPARTMENT OF MATHEMATICS CAPITAL UNIVERSITY OF SCIENCE AND TECHNOLOGY ISLAMABAD 2020 ii Copyright c 2020 by Faisal Shahzad All rights reserved. No part of this thesis may be reproduced, distributed, or transmitted in any form or by any means, including photocopying, recording, or other electronic or mechanical methods, by any information storage and retrieval system without the prior written permission of the author. iii Dedicated to my beloved father and adoring mother who remain alive within my heart vii List of Publications It is certified that following publication(s) have been made out of the research work that has been carried out for this thesis:- 1. F. Shahzad, M. Sagheer, and S. Hussain, \Numerical simulation of magnetohydrodynamic Jeffrey nanofluid flow and heat transfer over a stretching sheet considering Joule heating and viscous dissipation," AIP Advances, vol. 8, pp. 065316 (2018), DOI: 10.1063/1.5031447. 2. F. Shahzad, M. Sagheer, and S. Hussain, \MHD tangent hyperbolic nanofluid with chemical reaction, viscous dissipation and Joule heating effects,” AIP Advances, vol. -

Development of an Energy-Harvesting Magnetorheological Fluid Damper
University of Wollongong Research Online University of Wollongong Thesis Collection 1954-2016 University of Wollongong Thesis Collections 2016 Development of an energy-harvesting magnetorheological fluid damper Yun Lu University of Wollongong Follow this and additional works at: https://ro.uow.edu.au/theses University of Wollongong Copyright Warning You may print or download ONE copy of this document for the purpose of your own research or study. The University does not authorise you to copy, communicate or otherwise make available electronically to any other person any copyright material contained on this site. You are reminded of the following: This work is copyright. Apart from any use permitted under the Copyright Act 1968, no part of this work may be reproduced by any process, nor may any other exclusive right be exercised, without the permission of the author. Copyright owners are entitled to take legal action against persons who infringe their copyright. A reproduction of material that is protected by copyright may be a copyright infringement. A court may impose penalties and award damages in relation to offences and infringements relating to copyright material. Higher penalties may apply, and higher damages may be awarded, for offences and infringements involving the conversion of material into digital or electronic form. Unless otherwise indicated, the views expressed in this thesis are those of the author and do not necessarily represent the views of the University of Wollongong. Recommended Citation Lu, Yun, Development of an energy-harvesting magnetorheological fluid damper, Master of Philosophy thesis, School of Mechanical, Materials and Mechatronic Engineering, University of Wollongong, 2016. -

Electrorheological Dampers for Structural Vibration Suppression
P895-263893 11111111111111111111 11111111111 December 1994 Report No. UMCEE 94-:35 ELECTRORHEOLOGICAL DAMPERS FOR STRUCTURAL VIBRATION SUPPRESSION by Henri P. Gavin Robert D. Hanson A report on research sponsored by National Science Foundation Grant No. NSF-BCS-9201787 PROTECTED UNDER INTERNATIONAL COPYRIGHT ALL RIGHTS RESERVED. NATIONAL TECHNICAL INFORMATION SERVICE U.S. DEPARTMENT OF COMMERCE The Department of Civil and Environmental Engineering The University of Michigan Ann Arbor, Michigan 49109-2125 ACKNOWLEDGEMENTS The author thanks the National Science Foundation for providing the financial re sources to conduct the research described in this report. This report is, in essence, the doctoral dissertation of Henri P. Gavin. This dissertation was supported financially by a grant from the National Science Foundation under Award No. BCS-9201787 as part of the Coordinated USA Research Program on Structural Control for Safety, Performance, and Hazard Mitigation. Any opinions, findings, and conclusions or recommendations expressed in this publication are those of the author and do not necessarily reflect the views of the National Science Foundation. The contributions of Professors Hanson, McClamroch, Filisko, and Peek to this work are gratefully acknowledged. It is a privilege and an inspiration to be associated with internationally renowned leaders in their fields. Professor Hanson's skills go beyond his technical knowledge of earthquake engi neering and his ability to extract the most important mechanisms from very compli cated systems. He is a consummate organizer, leader, and mediator. I am indebted to him for providing me an opportunity to work in structural control, for his men torship, and for his expert guidance. Extensive discussions "With Professor Filisko contributed largely to my concept of ER materials. -

Distributions, Measures, Functions of Bounded Variations
Appendix A Distributions, Measures, Functions of Bounded Variations Sections A.1 and A.2 are given for the sake of completeness because some notions are used in Chaps. 1 and 2, but may be safely skipped since their implication on understanding Nonsmooth Mechanics is weak. By contrast, Sects. A.3 and B survey useful mathematical tools that cannot be ignored. A.1 Schwartz’ Distributions A.1.1 The Functional Approach In this section we first briefly introduce the functional notion of a distribution as defined in [1082]. Definition A.1 D is the subspace of smooth1 functions ϕ : Rn → C, with bounded support. Thus a function ϕ(·) on Rn belongs to D, if and only if ϕ(·) is smooth, and there n exists a bounded set Kϕ of R outside of which ϕ ≡ 0. As an example, L. Schwartz gives the following function [1082, Chap. 1,§2], with n = 1, Kϕ =[−1, 1]: 0if|t|≥1 ϕ(t) = −1 (A.1) e 1−t2 if |t| < 1 Definition A.2 A distribution D is a continuous linear form defined on the vector space D. This means that to any ϕ ∈ D, D associates a complex number D(ϕ), noted D, ϕ. The space of distributions on D is the dual space of D and is noted D . The functions in D are sometimes called test-functions. 1i.e., indefinitely differentiable. © Springer International Publishing Switzerland 2016 535 B. Brogliato, Nonsmooth Mechanics, Communications and Control Engineering, DOI 10.1007/978-3-319-28664-8 536 Appendix A: Distributions, Measures, Functions of Bounded Variations Two distributions D1, D2 are equal on an open interval Δ if D1 − D2 = 0 on Δ, i.e., if for any ϕ ∈ D whose support Kϕ is contained in Δ, then D1 − D2, ϕ=0. -

Magnetic Fluid Rheology and Flows
Current Opinion in Colloid & Interface Science 10 (2005) 141 – 157 www.elsevier.com/locate/cocis Magnetic fluid rheology and flows Carlos Rinaldi a,1, Arlex Chaves a,1, Shihab Elborai b,2, Xiaowei (Tony) He b,2, Markus Zahn b,* a University of Puerto Rico, Department of Chemical Engineering, P.O. Box 9046, Mayaguez, PR 00681-9046, Puerto Rico b Massachusetts Institute of Technology, Department of Electrical Engineering and Computer Science and Laboratory for Electromagnetic and Electronic Systems, Cambridge, MA 02139, United States Available online 12 October 2005 Abstract Major recent advances: Magnetic fluid rheology and flow advances in the past year include: (1) generalization of the magnetization relaxation equation by Shliomis and Felderhof and generalization of the governing ferrohydrodynamic equations by Rosensweig and Felderhof; (2) advances in such biomedical applications as drug delivery, hyperthermia, and magnetic resonance imaging; (3) use of the antisymmetric part of the viscous stress tensor due to spin velocity to lower the effective magnetoviscosity to zero and negative values; (4) and ultrasound velocity profile measurements of spin-up flow showing counter-rotating surface and co-rotating volume flows in a uniform rotating magnetic field. Recent advances in magnetic fluid rheology and flows are reviewed including extensions of the governing magnetization relaxation and ferrohydrodynamic equations with a viscous stress tensor that has an antisymmetric part due to spin velocity; derivation of the magnetic susceptibility -
Make a Ferrofluid
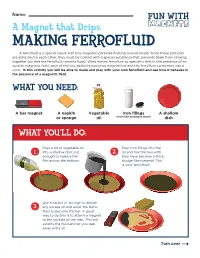
Name: FFUNUN WWITHITH MAGNETS A Magnet that Drips: MAKING FERROFLUID A ferrofl uid is a special liquid with tiny magnetic particles fl oating around inside. Since these particles are attracted to each other, they must be coated with a special substance that prevents them from sticking together (so that the ferrofl uid remains fl uid). What makes ferrofl uid so special is that in the presence of an outside magnetic fi eld, each of the tiny particles becomes magnetized and the ferrofl uid condenses into a solid. In this activity you will be able to make and play with your own ferrofl uid and see how it behaves in the presence of a magnetic fi eld. WHAT YOU NEED: A bar magnet A napkin Vegetable Iron fi lings A shallow or sponge oil (from the hardware store) dish WHAT YOU’LL DO: Pour a bit of vegetable oil Pour iron fi lings into the 1. into a shallow dish, just 2. oil and mix the two until enough to make a thin they have become a thick, fi lm across the bottom. sludge-like material. This is your ferrofl uid! Use a napkin or sponge to absorb 3. any excess oil and allow the ferro- fl uid to become thicker. A good way to do this is to attach a magnet to the outside of the dish. This will solidify the fl uid and let you dab away extra oil. Turn over FFUNUN WWITHITH MAGNETS MAKINGDRAWING FERROFLUIDFIELD LINES Attach a magnet to the dish 4. containing the ferrofl uid; the fl uid will solidify and take the shape of the magnetic fi eld it is in! Removing the magnetic fi eld will allow the ferrofl uid to fl ow like a liquid again. -

Complex Fluids in Energy Dissipating Systems
applied sciences Review Complex Fluids in Energy Dissipating Systems Francisco J. Galindo-Rosales Centro de Estudos de Fenómenos de Transporte, Faculdade de Engenharia da Universidade do Porto, CP 4200-465 Porto, Portugal; [email protected] or [email protected]; Tel.: +351-925-107-116 Academic Editor: Fan-Gang Tseng Received: 19 May 2016; Accepted: 15 July 2016; Published: 25 July 2016 Abstract: The development of engineered systems for energy dissipation (or absorption) during impacts or vibrations is an increasing need in our society, mainly for human protection applications, but also for ensuring the right performance of different sort of devices, facilities or installations. In the last decade, new energy dissipating composites based on the use of certain complex fluids have flourished, due to their non-linear relationship between stress and strain rate depending on the flow/field configuration. This manuscript intends to review the different approaches reported in the literature, analyses the fundamental physics behind them and assess their pros and cons from the perspective of their practical applications. Keywords: complex fluids; electrorheological fluids; ferrofluids; magnetorheological fluids; electro-magneto-rheological fluids; shear thickening fluids; viscoelastic fluids; energy dissipating systems PACS: 82.70.-y; 83.10.-y; 83.60.-a; 83.80.-k 1. Introduction Preventing damage or discomfort resulting from any sort of external kinetic energy (impact or vibration) is an omnipresent problem in our society. On one hand, impacts and vibrations are responsible for several health problems. According to the European Injury Data Base (IDB), injuries due to accidents are killing one EU citizen every two minutes and disabling many more [1].