M2.1 - Transformation Geometry
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Page 1 of 1 Geometry, Student Text and Homework Helper 11/7/2016
Geometry, Student Text and Homework Helper Page 1 of 1 Skip Directly to Table of Contents | Skip Directly to Main Content Change text size Show/Hide TOC Page Unit 1 Logical Arguments and Constructions; Proof and Congruence > Topic 3 Parallel and Perpendicular Lines > 3-5 Parallel Lines and Triangles 3-5 Parallel Lines and Triangles Teks Focus TEKS (6)(D) Verify theorems about the relationships in triangles, including proof of the Pythagorean Theorem, the sum of interior angles, base angles of isosceles triangles, midsegments, and medians, and apply these relationships to solve problems. TEKS (1)(F) Analyze mathematical relationships to connect and communicate mathematical ideas. Additional TEKS (1)(G) Vocabulary • Auxiliary line – a line that you add to a diagram to help explain relationships in proofs • Exterior angle of a polygon – an angle formed by a side and an extension of an adjacent side • Remote interior angles – the two nonadjacent interior angles corresponding to each exterior angle of a triangle • Analyze – closely examine objects, ideas, or relationships to learn more about their nature ESSENTIAL UNDERSTANDING The sum of the angle measures of a triangle is always the same. take note Postulate 3-2 Parallel Postulate Through a point not on a line, there is one and only one line parallel to the given line. There is exactly one line through P parallel to ℓ. take note Theorem 3-11 Triangle Angle-Sum Theorem The sum of the measures of the angles of a triangle is 180. m∠A + m∠B + m∠C = 180 For a proof of Theorem 3-11, see Problem 1. -

Transformation Geometry — Math 331
Transformation Geometry — Math 331 March 8, 2004 Conjugation of Isometries Definition. If f and g are invertible affine transformations of Rn, the conjugate of f by g is the transformation g ◦ f ◦ g−1. When the context is clear, one sometimes abbreviates notation for conjugation by writing g · f = g ◦ f ◦ g−1 . One views this as g “acting on” f. That is, an affine transformation of Rn not only describes a motion of Rn but also a motion on the set of affine transformations of Rn: the action of the set of affine transformations on itself by conjugation. Theorem 1. If f(x) = Ux + v is an affine transformation of Rn and τ(x) = x + a is translation by the vector a, then f · τ is translation by the vector Ua. Proof. f −1(x) = U −1x − U −1v, and, therefore y = τ ◦ f −1(x) = U −1x − U −1v + a. Then (f · τ)(x) = Uy + v = x + Ua. Warning. Although when a translation is conjugated by an arbitrary affine transformation, the result is a translation, it is not true that the result of conjugating an isometry by an affine transformation is always an isometry. For example, if f is the simple linear transformation (x, y) 7→ (2x, y) of R2 and ρ is rotation through the angle π/2 about the origin, i.e., (x, y) 7→ (−y, x), then f · ρ is the linear map (x, y) 7→ (−2y, x/2), which is not an isometry. On the other hand, it is clear that the result of conjugating an isometry by an isometry is an isometry. -

II.3 : Measurement Axioms
I I.3 : Measurement axioms A large — probably dominant — part of elementary Euclidean geometry deals with questions about linear and angular measurements , so it is clear that we must discuss the basic properties of these concepts . Linear measurement In elementary geometry courses , linear measurement is often viewed using the lengths of line segments . We shall view it somewhat differently as giving the (shortest) distance 2 3 between two points . Not surprisingly , in RRR and RRR we define this distance by the usual Pythagorean formula already given in Section I.1. In the synthetic approach , one may view distance as a primitive concept given formally by a function d ; given two points X, Y in the plane or space , the distance d (X, Y) is assumed to be a nonnegative real number , and we further assume that distances have the following standard properties : Axiom D – 1 : The distance d (X, Y) is equal to zero if and only if X = Y. Axiom D – 2 : For all X and Y we have d (X, Y) = d (Y, X). Obviously it is also necessary to have some relationships between an abstract notion of distance and the other undefined concepts introduced thus far ; namely , lines and planes . Intuitively we expect a geometrical line to behave just like the real number line , and the following axiom formulated by G. D. Birkhoff (1884 – 1944) makes this idea precise : Axiom D – 3 ( Ruler Postulate ) : If L is an arbitrary line , then there is a 1 – 1 correspondence between the points of L and the real numbers RRR such that if the points X and Y on L correspond to the real numbers x and y respectively , then we have d (X, Y) = |x – y |. -

Neutral Geometry
Neutral geometry And then we add Euclid’s parallel postulate Saccheri’s dilemma Options are: Summit angles are right Wants Summit angles are obtuse Was able to rule out, and we’ll see how Summit angles are acute The hypothesis of the acute angle is absolutely false, because it is repugnant to the nature of the straight line! Rule out obtuse angles: If we knew that a quadrilateral can’t have the sum of interior angles bigger than 360, we’d be fine. We’d know that if we knew that a triangle can’t have the sum of interior angles bigger than 180. Hold on! Isn’t the sum of the interior angles of a triangle EXACTLY180? Theorem: Angle sum of any triangle is less than or equal to 180º Suppose there is a triangle with angle sum greater than 180º, say anglfle sum of ABC i s 180º + p, w here p> 0. Goal: Construct a triangle that has the same angle sum, but one of its angles is smaller than p. Why is that enough? We would have that the remaining two angles add up to more than 180º: can that happen? Show that any two angles in a triangle add up to less than 180º. What do we know if we don’t have Para lle l Pos tul at e??? Alternate Interior Angle Theorem: If two lines cut by a transversal have a pair of congruent alternate interior angles, then the two lines are parallel. Converse of AIA Converse of AIA theorem: If two lines are parallel then the aliilblternate interior angles cut by a transversa l are congruent. -

Geometry Ch 5 Exterior Angles & Triangle Inequality December 01, 2014
Geometry Ch 5 Exterior Angles & Triangle Inequality December 01, 2014 The “Three Possibilities” Property: either a>b, a=b, or a<b The Transitive Property: If a>b and b>c, then a>c The Addition Property: If a>b, then a+c>b+c The Subtraction Property: If a>b, then a‐c>b‐c The Multiplication Property: If a>b and c>0, then ac>bc The Division Property: If a>b and c>0, then a/c>b/c The Addition Theorem of Inequality: If a>b and c>d, then a+c>b+d The “Whole Greater than Part” Theorem: If a>0, b>0, and a+b=c, then c>a and c>b Def: An exterior angle of a triangle is an angle that forms a linear pair with an angle of the triangle. A In ∆ABC, exterior ∠2 forms a linear pair with ∠ACB. The other two angles of the triangle, ∠1 (∠B) and ∠A are called remote interior angles with respect to ∠2. 1 2 B C Theorem 12: The Exterior Angle Theorem An Exterior angle of a triangle is greater than either remote interior angle. Find each of the following sums. 3 4 26. ∠1+∠2+∠3+∠4 2 1 6 7 5 8 27. ∠1+∠2+∠3+∠4+∠5+∠6+∠7+ 9 12 ∠8+∠9+∠10+∠11+∠12 11 10 28. ∠1+∠5+∠9 31. What does the result in exercise 30 indicate about the sum of the exterior 29. ∠3+∠7+∠11 angles of a triangle? 30. ∠2+∠4+∠6+∠8+∠10+∠12 1 Geometry Ch 5 Exterior Angles & Triangle Inequality December 01, 2014 After proving the Exterior Angle Theorem, Euclid proved that, in any triangle, the sum of any two angles is less than 180°. -

Augmented Reality Mobile Learning System: Study to Improve Psts’ Understanding of Mathematical Development
Short Paper—Augmented Reality Mobile Learning System: Study Study to Improve PSTs’… Augmented Reality Mobile Learning System: Study to Improve PSTs’ Understanding of Mathematical Development https://doi.org/10.3991/ijim.v14i09.12909 Mohammad Faizal Amir(), Novia Ariyanti, Najih Anwar Universitas Muhammadiyah Sidoarjo, Sidoarjo, Indonesia [email protected] Erik Valentino STKIP Bina Insan Mandiri Surabaya, Surabaya, Indonesia Dian Septi Nur Afifah STKIP PGRI Tulungagung, Tulungagung, Indonesia Abstract—Augmented Reality research in mobile learning systems so far have not especially to improve Preservice Students Teachers' (PSTs) geometry understanding in mathematical development. Studies conducted in this study ba- sically use a case study. This research aims to develop a mobile augmented reality system for PSTs learning so that it can be used to improve PSTs understanding of mathematics development includes doing, image-making, an image having, property noticing, formalizing, observing, structuring and inventing. In this de- velopment, PSTs can understand the understanding of the geometry transfor- mation is a translation, reflection, rotation, and dilatation. Keywords—Mobile systems, augmented reality, understanding mathematics, geometry transformation. 1 Introduction In PISA 2015 mathematics assessed as minor domains, providing the opportunity to make comparisons of student performance over time. The results of preliminary field studies, mathematical understanding of geometry Preservice Student Teachers (PSTs) 20 of 36 in Universitas Muhammadiyah Sidoarjo have difficulty in solving mathemat- ical understanding of geometry. The development of learners by understanding participants [1] includes doing, im- age-making, an image having, property noticing, formalizing, observing, structuring, and inventing, linking concepts, ideas, facts, or mathematics procedures. Results of re- search by [2], [6] shows the importance of understanding the development problems of geometry PSTs that many of the teachers or prospective elementary school teachers do iJIM ‒ Vol. -

Chapter 4 Euclidean Geometry
Chapter 4 Euclidean Geometry Based on previous 15 axioms, The parallel postulate for Euclidean geometry is added in this chapter. 4.1 Euclidean Parallelism, Existence of Rectangles De¯nition 4.1 Two distinct lines ` and m are said to be parallel ( and we write `km) i® they lie in the same plane and do not meet. Terminologies: 1. Transversal: a line intersecting two other lines. 2. Alternate interior angles 3. Corresponding angles 4. Interior angles on the same side of transversal 56 Yi Wang Chapter 4. Euclidean Geometry 57 Theorem 4.2 (Parallelism in absolute geometry) If two lines in the same plane are cut by a transversal to that a pair of alternate interior angles are congruent, the lines are parallel. Remark: Although this theorem involves parallel lines, it does not use the parallel postulate and is valid in absolute geometry. Proof: Assume to the contrary that the two lines meet, then use Exterior Angle Inequality to draw a contradiction. 2 The converse of above theorem is the Euclidean Parallel Postulate. Euclid's Fifth Postulate of Parallels If two lines in the same plane are cut by a transversal so that the sum of the measures of a pair of interior angles on the same side of the transversal is less than 180, the lines will meet on that side of the transversal. In e®ect, this says If m\1 + m\2 6= 180; then ` is not parallel to m Yi Wang Chapter 4. Euclidean Geometry 58 It's contrapositive is If `km; then m\1 + m\2 = 180( or m\2 = m\3): Three possible notions of parallelism Consider in a single ¯xed plane a line ` and a point P not on it. -

Learners Engaging with Transformation Geometry
South African Journal of Education Copyright © 2012 EASA Vol 32:26-39 Learners engaging with transformation geometry Sarah Bansilal and Jayaluxmi Naidoo Department of Mathematics, University of KwaZulu-Natal [email protected] This article reports on a qualitative, interpretivist study that focused on the use of visualisation and analytic strategies by Grade 12 learners when working with problems based on transformation geometry. The research was conducted with 40 learners from a Grade 12 class at one high school in the north Durban area of Kwazulu-Natal. Participants completed a written task and a smaller sample of the participants engaged in investigative semi-structured interviews with the resear- chers. The framework for the study was based on transformations of semiotic representations as well as the visualiser/analyser model. The findings revealed that most learners performed treatments in the analytic mode when responding to the tasks, and showed limited movement across the two modes which are essential for a deepening of understanding. The study identified one learner, however, who was able to move flexibly between the modes and who displayed a deep understanding of the concepts. The article concludes by recommending that opportunities need to be created for learners to engage in transformation geometry activities which em- phasise conversion. Keywords: analysis; conversions; transformation geometry; transformations; treatments; visualisation Introduction Within the current (2011) South African curriculum, school mathematics incorporates trans- formation geometry, which was introduced in the Further Education and Training (FET) band in 2006. This strand allows learners to make connections across other geometries within the space, shape and measurement learning outcome, as well as with algebra and trigonometry. -

Basic Transformation Geometry
Basic Transformation Geometry For transformation geometry there are two basic types: rigid transformations and non-rigid transformations. This page will deal with three rigid transformations known as translations, reflections and rotations. The Vocabulary of Transformation Geometry In short, a transformation is a copy of a geometric figure, where the copy holds certain properties. Think of when you copy/paste a picture on your computer. The original figure is called the pre-image; the new (copied) picture is called theimage of the transformation. A rigid transformation is one in which the pre-image and the image both have the exact same size and shape. Translations - Each Point is Moved the Same Way The most basic transformation is the translation. The formal definition of a translation is "every point of the pre-image is moved the same distance in the same direction to form the image." Take a look at the picture below for some clarification. Each translation follows a rule. In this case, the rule is "5 to the right and 3 up." You can also translate a pre-image to the left, down, or any combination of two of the four directions. More advanced transformation geometry is done on the coordinate plane. The transformation for this example would be T(x, y) = (x+5, y+3). Reflections - Like Looking in a Mirror A reflection is a "flip" of an object over a line. Let's look at two very common reflections: a horizontal reflection and a vertical reflection. Notice the colored vertices for each of the triangles. The line of reflection is equidistant from both red points, blue points, and green points. -
Transformation Geometry 1.Pub
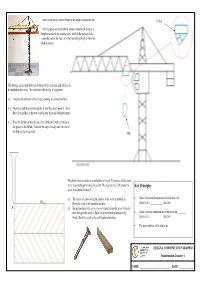
Tower cranes are a common fixture at any major construction site. Trolley The 3D graphic on the left shows a tower crane which contains a long horizontal jib (or working arm), which is the portion of the crane that carries the load. A trolley runs along the jib to move the load in and out. A The drawing on the right shows an elevation of the crane and skip which is to be attached to the trolley. The elevation of the trolley is incomplete. (a) Complete the elevation of the trolley, showing all construction lines. (b) The trolley and skip move along the jib until they reach point A. Show the trolley and skip in the new position after this horizontal movement. (c) When the trolley reaches the end of the jib the skip must be lowered to the ground to be refilled. Translate the skip vertically until the base of the skip reaches the ground. Skip The photo shows a wood screw and a piece of wood. Two pieces of this wood are to be jointed together using the screw. The diagram over (left) shows the Key Principles screw in its initial position A. (a) The screw is to move along the surface of the wood to position A . • Under a horizontal translation all points move the _______ A1 1 Show the screw in the translated position. distance in a ____________ direction A (b) Having positioned the screw, it is to be inserted into the wood vertically until the top of the screw is flush (level) with the top surface of the • Under a vertical translation all points move the ________ wood. -

Geometric Transformations in Middle School Mathematics Textbooks
University of South Florida Scholar Commons Graduate Theses and Dissertations Graduate School 2011 Geometric Transformations in Middle School Mathematics Textbooks Barbara Zorin University of South Florida, [email protected] Follow this and additional works at: https://scholarcommons.usf.edu/etd Part of the American Studies Commons, and the Science and Mathematics Education Commons Scholar Commons Citation Zorin, Barbara, "Geometric Transformations in Middle School Mathematics Textbooks" (2011). Graduate Theses and Dissertations. https://scholarcommons.usf.edu/etd/3421 This Dissertation is brought to you for free and open access by the Graduate School at Scholar Commons. It has been accepted for inclusion in Graduate Theses and Dissertations by an authorized administrator of Scholar Commons. For more information, please contact [email protected]. Geometric Transformations in Middle School Mathematics Textbooks by Barbara Zorin A dissertation submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy Department of Secondary Education College of Education University of South Florida Major Professor: Denisse R. Thompson, Ph.D. Richard Austin, Ph.D. Catherine A. Beneteau, Ph.D. Helen Gerretson, Ph.D. Gladis Kersaint, Ph.D. Date of Approval: March 10, 2011 Keywords: Geometry, Transformations, Middle School, Mathematics Textbooks, Content Analysis Copyright © 2011, Barbara Zorin 1 Dedication This dissertation is dedicated to my father, Arthur Robert, who provided me with love and support, and who taught me, from a very early age, that I could accomplish anything that I put my mind to. To my son, Rick, for always believing that I was the smartest person he had ever met and showing me that he knew that I would complete this endeavor. -
Basic Theorems of Euclidean Geometry
Basic Theorems of Euclidean Geometry We finally adopt the Euclidean Parallel Postulate and explore geometry under this assumption. The result is Euclidean Geometry and its major results are similarity, the Pythagorean Theorem, and trigonometry, although there is of course much more. Axiom (The Euclidean Parallel Postulate): For every line l and for every point P that does not lie on l, there is exactly one line m such that P lies on m and m is parallel to l. We now have as theorems all those statements that we proved equivalent to EPP earlier, including: 1. If two parallel lines are cut by a transversal, alternate interior angles are congruent. 2. (Euclid’s Postulate V) If two lines in the same plane are cut by a transversal so that the sum of the measures of a pair of interior angles on the same side of the transversal is less than 180, then the lines will meet on that side of the transversal. 3. (Proclus’s Axiom) A third line intersecting one of two parallel lines intersects the other. 4. A line perpendicular to one of two parallel lines is perpendicular to the other. 5. The perpendicular bisectors of the sides of a triangle are concurrent. 6. There exists a circle passing through any three noncollinear points. 7. (Angle Sum Postulate) The sum of measures of the angles of a triangle is 180. 8. There exists one triangle such that the sum of measures of the angles is 180. 9. There exists a rectangle. 10. There exist two lines l and m such that l is equidistant from m.