Geodetic Study of the 2006–2010 Ground Deformation in La Palma (Canary Islands): Observational Results
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Population Size and Status of Common Raven (Corvus Corax ) on the Central-Western Islands of the Canarian Archipelago
VIERAEA Vol. 38 123-132 Santa Cruz de Tenerife, septiembre 2010 ISSN 0210-945X Population size and status of Common Raven (Corvus corax ) on the central-western islands of the Canarian archipelago MANUEL SIVERIO 1*, E DUARDO I. G ONZÁLEZ 2 & F ELIPE SIVERIO 3 1Gesplan SAU, Residencial Amarca, Avenida Tres de Mayo, 71 E-38005 Santa Cruz de Tenerife, Tenerife, Canary Islands, Spain 230 de Mayo 50-3º-A, E-38710 Breña Alta, La Palma Canary Islands, Spain 3Los Barros 21, E-38410 Los Realejos, Tenerife, Canary Islands, Spain SIVERIO , M., E. I. G ONZÁLEZ & F. S IVERIO (2010). Tamaño de la población y estatus del cuervo (Corvus corax ) en las islas centro-occidentales del archipiélago canario. VIERAEA 38: 123-132. RESUMEN: Durante la estación reproductora de 2009 (febrero-junio) se ha estudiado el tamaño de la población de cuervo en cuatro islas del archipié- lago canario. En total fueron censadas 44 parejas: diez en Gran Canaria, 12 en Tenerife, 17 en La Palma y cinco en La Gomera. La mayoría de estas parejas tienen sus territorios en barrancos, roquedos y acantilados marinos, coincidiendo con enclaves donde aún existe actividad ganadera (rebaños de cabras y ovejas) o cabras asilvestradas. Es muy probable que el tamaño de la población flotante no supere al de las aves reproductoras. Se discuten las amenazas reales y potenciales. Palabras clave: Corvus corax, censo, distribución, conservación, islas cen- tro-occidentales, archipiélago canario. ABSTRACT: During the 2009 breeding season (February-June) we studied the population size of Common Raven on four islands of the Canarian archi- pelago. -

Monitoring Diffuse CO2 Emissions by Means of an Automatic Geochemical Station at Cumbre Vieja Volcano, La Palma, Canary Islands
EGU21-15149 https://doi.org/10.5194/egusphere-egu21-15149 EGU General Assembly 2021 © Author(s) 2021. This work is distributed under the Creative Commons Attribution 4.0 License. Monitoring diffuse CO2 emissions by means of an automatic geochemical station at Cumbre Vieja volcano, La Palma, Canary Islands. José Barrancos1,2, Claudia Rodríguez1, Eleazar Padrón1,2, Pedro A. Hernández1,2, Germán D. Padilla1,2, Luca D’Auria1,2, and Nemesio M. Pérez1,2 1Instituto Volcanológico de Canarias (INVOLCAN), Granadilla de Abona, Tenerife, Canary Islands, Spain ([email protected]) 2Instituto Tecnológico y de Energías Renovables (ITER), Granadilla de Abona, Tenerife, Canary Islands, Spain La Palma Island (708.3 km2) is located at the north-west and is one of the youngest (~2.0My) of the Canarian Archipelago. Volcanic activity has taken place exclusively at the southern part of the island, where Cumbre Vieja volcano, the most active basaltic volcano in the Canaries, has been constructed in the last 123 ky. Cumbre Vieja has suffered seven eruptions in the last 500 years, being the last in 1971 (Teneguía volcano). Since the last eruptive episode, Cumbre Vieja volcano has remained in a relative seismic calm that was interrupted on October 7th and 13rd, 2017, by two remarkable seismic swarms with earthquakes located beneath Cumbre Vieja volcano at depths ranging between 14 and 28 km with a maximum magnitude of 2.7. The frequency of these seismic episodes increased in 2020 with the occurrence of five more seismic swarms As part of the volcano monitoring program of Cumbre Vieja, diffuse degassing of CO2 has been continuously monitored since 2005 at the southernmost part of Cumbre Vieja according to the accumulation chamber method. -

Tsunami Risk Analysis of the East Coast of the United States
Tsunami Risk Analysis of the East Coast of the United States INTRODUCTION METHODOLOGY In the wake of the 2004 Indian Ocean tsunami and the 2011 Japan tsunami and Given the large area of the east coast, a rudimentary analysis was performed. corresponding nuclear disaster, much more attention has been focused on coastal Elevation is the most important factor in analyzing the risk of flooding in a coastal vulnerability to tsunamis. Areas near active tectonic margins have a much higher area; the lower the elevation, the greater the potential for damage. Elevation data risk of being hit by a tsunami, due to proximity. People who live in these areas are was reclassified into no risk, medium risk, and high risk zones. These zones were: more aware of the danger than their counterparts on passive tectonic margins. It is 25+ m above sea level, 10 to 25 m above sea level, and below 10 m above sea lev- generally a good assumption that the risk of a tsunami is low in places like the el. Essentially, most land adjacent to the coast that falls in the final category eastern seaboard of the United States. would be badly damaged by a 10m tsunami from the Canary Islands, unless buff- Despite the low risk, the east coast has been hit by tsunamis in the past. Ex- ered by another portion of land blocking the coast. If a larger tsunami were to oc- amples include the Newfoundland tsunami caused by the Grand Banks earth- cur, up to the max wave height predicted by Ward and Day of 25 m, any land ad- quake. -

Results of the Iv World Congress of Terraced Landscapes
RESULTS OF THE IV WORLD CONGRESS OF TERRACED LANDSCAPES ORGANIZED BY ITLA MAC IN CANARY ISLANDS, SPAIN From 13 to 22 March 2019 the IV World Congress of Terraced Landscapes Re- enchanting Terraces has been held in La Gomera, Canary Islands (Spain). The Congress, organized by the International Terraced Landscapes Alliance (ITLA) had the objective to show the significative value of the terraced landscapes as active resources that can be used to meet new social demands for food, agriculture, leisure, education, social interaction and finally quality of life with friendly, beautiful and safe landscapes against natural risks. The Congress focuses on the specific problems of the Canary Islands, Madeira, Azores and Cape Verde to develop a global thinking on the perspectives of these territories in the future. More than 150 experts from different countries and representing all the various institutions that have organized the event in Canary Islands participated to the Congress. From 16 to 18 March, the congress participants, divided into 14 groups, moved to the eight islands of El Hierro, Fuerteventura, Gran Canaria, La Gomera, Lanzarote, La Palma, Tenerife and Madeira, to visit the productive and abandoned terraces, to discuss with owners and farmers, to exchange with the population and the local institutions about the perspectives of their development. As a result of these visits, specialists in various disciplines related to the environment, land management, geography or architecture have travelled to La Gomera from the different islands to participate in the final event of the IV World Congress of Terraced Landscapes. On this occasion the representative of the local government of La Gomera, valuing the great contribution of the event, has stressed that in the island are being implemented 50 projects of rehabilitation of terraces that require sustainable development and economic strategies to ensure their conservation. -

Assessment of Tsunami Hazard to the U.S. Atlantic Margin
Marine Geology 353 (2014) 31–54 Contents lists available at ScienceDirect Marine Geology journal homepage: www.elsevier.com/locate/margeo Review article Assessment of tsunami hazard to the U.S. Atlantic margin U.S. ten Brink a,⁎,J.D.Chaytora, E.L. Geist b,D.S.Brothersa,1, B.D. Andrews a a U.S. Geological Survey, 384 Woods Hole Rd., Woods Hole, MA 02543, USA b U.S. Geological Survey, 345 Middlefield Rd., Menlo Park, CA 94025, USA article info abstract Article history: Tsunami hazard is a very low-probability, but potentially high-risk natural hazard, posing unique challenges to Received 23 May 2013 scientists and policy makers trying to mitigate its impacts. These challenges are illustrated in this assessment Received in revised form 19 February 2014 of tsunami hazard to the U.S. Atlantic margin. Seismic activity along the U.S. Atlantic margin in general is low, Accepted 22 February 2014 and confirmed paleo-tsunami deposits have not yet been found, suggesting a very low rate of hazard. However, Available online 22 March 2014 the devastating 1929 Grand Banks tsunami along the Atlantic margin of Canada shows that these events continue Communicated by: D.J.W. Piper to occur. Densely populated areas, extensive industrial and port facilities, and the presence of ten nuclear power plants along the coast, make this region highly vulnerable to flooding by tsunamis and therefore even low- Keywords: probability events need to be evaluated. submarine landslides We can presently draw several tentative conclusions regarding tsunami hazard to the U.S. Atlantic coast. Land- meteo-tsunami slide tsunamis likely constitute the biggest tsunami hazard to the coast. -
Right) and the Location of La Palma Island in Canary (Above Left
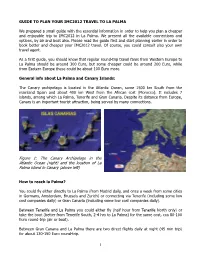
GUIDE TO PLAN YOUR IMC2012 TRAVEL TO LA PALMA We prepared a small guide with the essential information in order to help you plan a cheaper and enjoyable trip to IMC2012 in La Palma. We present all the available connections and options, by air and boat also. Please read the guide first and start planning earlier in order to book better and cheaper your IMC2012 travel. Of course, you could consult also your own travel agent. As a first guide, you should know that regular round-trip travel fares from Western Europe to La Palma should be around 300 Euro, but some cheaper could be around 200 Euro, while from Eastern Europe these could be about 100 Euro more. General info about La Palma and Canary Islands: The Canary archipelago is located in the Atlantic Ocean, some 1500 km South from the mainland Spain and about 400 km West from the African cost (Morocco). It includes 7 islands, among which La Palma, Tenerife and Gran Canaria. Despite its distance from Europe, Canary is an important tourist attraction, being served by many connections. Figure 1: The Canary Archipelago in the Atlantic Ocean (right) and the location of La Palma island in Canary (above left) How to reach la Palma? You could fly either directly to La Palma (from Madrid daily, and once a week from some cities in Germany, Amsterdam, Brussels and Zurich) or connecting via Tenerife (including some low cost companies daily) or Gran Canaria (including some low cost companies daily). Between Tenerife and La Palma you could either fly (half hour from Tenerife North only) or take the boat (better from Tenerife South, 2-4 hrs to La Palma) for the same cost, cca 80-100 Euro round-trip (air or boat). -

Vacantes-Santa-Cruz-De-Tenerife
ANEXO II VACANTES PROVISIONALES TENERIFE CÓDIGO CENTRO MUNICIPIO 38015230 CEEE Adeje San Miguel de Abona 38009621 CEPA Guayafanta Santa Cruz de La Palma 38008560 CEIP Abona Granadilla de Abona 38003756 CEIP Adamancasis El Paso 38010888 CEIP Aguamansa La Orotava 38008705 CEIP Aguere San Cristóbal de La Laguna 38004773 CEIP Aldea Blanca San Miguel de Abona 38001036 CEIP A. del Valle Menéndez Garachico 38000792 CEIP Araya Candelaria 38003860 CEIP Arco Iris El Paso 38009941 CEIP Atalaya La Matanza de Acentejo 38000101 CEIP Áurea Miranda González Agulo 38006514 CEIP Aurelio Emilio Acosta Fernández Santiago del Teide 38009783 CEIP Ayatimas San Cristóbal de La Laguna 38007658 CEIP Bajos y Tagoro La Victoria de Acentejo 38009588 CEIP Benahoare Santa Cruz de La Palma 38000561 CEIP Breña Breña Alta 38001899 CEIP Buen Paso Icod de Los Vinos 38000615 CEIP Buenavista de Abajo Breña Alta 38009539 CEIP Camino de La Villa San Cristóbal de La Laguna 38000974 CEIP Cecilia González Alayón Fuencaliente de La Palma 38003926 CEIP César Manrique Puerto de La Cruz 38001498 CEIP Chigora Guía de Isora 38001486 CEIP Chiguergue Guía de Isora 38008122 CEIP Chimisay Santa Cruz de Tenerife 38001516 CEIP Chirche Guía de Isora 38003537 CEIP Domínguez Alfonso La Orotava 38008614 CEIP El Fraile Arona 38008006 CEIP El Mocanal Juana María Hernández Armas Valverde 38009965 CEIP El Monte San Miguel de Abona 38009059 CEIP El Roque San Miguel de Abona 38002041 CEIP Emeterio Gutiérrez Albelo Icod de Los Vinos 38006745 CEIP Erjos Los Silos 38005716 CEIP Fray Albino Santa Cruz -

The Iberian-Guanche Rock Inscriptions at La Palma Is.: All Seven Canary Islands (Spain) Harbour These Scripts
318 International Journal of Modern Anthropology Int. J. Mod. Anthrop. 2020. Vol. 2, Issue 14, pp: 318 - 336 DOI: http://dx.doi.org/10.4314/ijma.v2i14.5 Available online at: www.ata.org.tn & https://www.ajol.info/index.php/ijma Research Report The Iberian-Guanche rock inscriptions at La Palma Is.: all seven Canary Islands (Spain) harbour these scripts Antonio Arnaiz-Villena1*, Fabio Suárez-Trujillo1, Valentín Ruiz-del-Valle1, Adrián López-Nares1, Felipe Jorge Pais-Pais2 1Department of Inmunology, University Complutense, School of Medicine, Madrid, Spain 2Director of Museo Arqueológico Benahoarita. C/ Adelfas, 3. Los Llanos de Aridane, La Palma, Islas Canarias. *Corresponding author: Antonio Arnaiz-Villena. Departamento de Inmunología, Facultad de Medicina, Universidad Complutense, Pabellón 5, planta 4. Avd. Complutense s/n, 28040, Spain. E-mail: [email protected] ; [email protected]; Web page:http://chopo.pntic.mec.es/biolmol/ (Received 15 October 2020; Accepted 5 November 2020; Published 20 November 2020) Abstract - Rock Iberian-Guanche inscriptions have been found in all Canary Islands including La Palma: they consist of incise (with few exceptions) lineal scripts which have been done by using the Iberian semi-syllabary that was used in Iberia and France during the 1st millennium BC until few centuries AD .This confirms First Canarian Inhabitants navigation among Islands. In this paper we analyze three of these rock inscriptions found in westernmost La Palma Island: hypotheses of transcription and translation show that they are short funerary and religious text, like of those found widespread through easternmost Lanzarote, Fuerteventura and also Tenerife Islands. They frequently name “Aka” (dead), “Ama” (mother godness) and “Bake” (peace), and methodology is mostly based in phonology and semantics similarities between Basque language and prehistoric Iberian-Tartessian semi-syllabary transcriptions. -

Research Report CACR-11-08
LITERATURE REVIEW OF TSUNAMI SOURCES AFFECTING TSUNAMI HAZARD ALONG THE US EAST COAST STEPHAN T. GRILLI , JEFFREY C. HARRIS AND TAYEBEH TAJALLI BAKHSH DEPARTMENT OF OCEAN ENGINEERING , UNIVERSITY OF RHODE ISLAND NARRAGANSETT , USA RESEARCH REPORT NO. CACR-11-08 FEBRUARY 2011 Prepared as part of NTHMP Award # NA10NWS4670010 National Weather Service Program Office Project Dates: August 1, 2010 – July 31, 2013 Recipients: U. of Delaware (J.T. Kirby, PI); U. of Rhode Island (S.T. Grilli, co-PI) CENTER FOR APPLIED COASTAL RESEARCH Ocean Engineering Laboratory University of Delaware Newark, Delaware 19716 TABLE OF CONTENTS 1. BACKGROUND ...................................................................................................................... 3 2. LITERATURE REVIEW OF RELEVANT TSUNAMI SOURCES .................................... 5 2.1 Submarine Mass Failures ........................................................................................................ 5 2.2 Co-seismic tsunamis .................................................................................................................. 8 2.2.1 Review of literature on Caribbean subduction zone ............................................................. 8 2.2.2 NOAA Forecast Source Database for Caribbean subduction zone ............................... 16 2.2.3 Azores-Gibraltar convergence zone .......................................................................................... 17 2.3 Cumbre Vieja Volcano flanK collapse .............................................................................. -

Birds of Resaca De La Palma State Park
TEXAS PARKS AND WILDLIFE BIRDS OF RESACA DE LA PALMA STATE PARK A FIELD CHECKLIST 2008 INTRODUCTION esaca de la Palma State Park is a 1,200-acre park and World Birding Center site located to the northwest of Brownsville, R Texas. The flora and fauna in the park are sustained by a resaca. The resaca, or dry riverbed, was formed by the flooding of the Rio Grande; when seasonal rains fill the resacas, wildlife come to the water, creating an opportunity for people to view wildlife and enjoy the natural world. Park staff can control the water level in the resaca to support a variety of wildlife throughout the year. The resaca also supports a variety of habitats that are vital for the survival of the wildlife. White-tipped Doves and Green Jays call from within the hackberry forest, and migrating warblers forage for insects on the hackberry’s large leaves. In the Ebony forest, Groove- billed Anis quietly watch the visitors, and White-eyed Vireos and Long-billed Thrashers use the dense vegetation for nesting. Olive Sparrows and Northern Mockingbirds sing as they forage through the thorn-scrub. In the revegetated grasslands one will fi nd White- tailed Kites, Mississippi Kites and other raptors searching for prey. Northern Bobwhites call from the grass, where they nest and raise young. In the resaca itself, Least Grebes, Green Herons, Black-bellied Whistling-Ducks and other water birds forage through the water and mud. In one visit to the resaca, a birder could easily see Belted, Ringed and Green Kingfi shers. -

San Isidro M
6 3 6 - F T ( E H C A B C D I M I H C - O R CIRCUNVALACIÓN DE ID IS N A S SA ISIDN L A R E RO N E G A ER ET RR CA R TACORONTE A SAN ISIDRO M A A C J S ABONA A A M B A CH AN U G L LA A E A L CALLE C/ G L D E A A C A R SAUZAL M N D U AJ E O G LP ICOD S OS SILOS P LA IF L A CHICO 1 EL 1 C LA L A E E L C/ L GARA E A E T O QU L UES PZ L E A C L L G CALLE CALLE L A A TAN AJ A A A A C L C L S V EL É E CALLE 03 I A U T AVENIDA P Q I O R ALLE PZ R H U C E CALLE T T CALLE C N O ) R AJ RO A 4 A N N E Á L O LC 6 L C O A V - A A E C T N F CALLE 04 EL L L T A ( A A G AJ E T ALL C IS A Colegio C T Abona O V A 03 C A 1 L A N JE Y E E 0 LL BU L E E SA A A E J C PA A A E A AJ TURQUESA AJ D S D L EL SAUZAL CALLE A A U L P CALLE 04 I G LE OS SILOS VA D ESMERALD AL L PZ S C A 6 0 O N CALLE A R L E A J U AJ E R A L M PZ E RISCO L S A L G L E OS REALEJOS ICOD R A A A C L L E C P CALLE N L TRIGO - E A /EL C/ R L /EL C/ C E L O PASAJE 02 L H A L AL 01 CALLE C A O 05 C 4 R CALLE 01 JE CALLE PZ A 0 AAE05 PASAJE SA CALLE GUAMASA L D PA I 08 CALLE JE PU S E I CALLE L SA L CA N PA A S RISCO AJ O I CALLE C C A O L I L A A E C A V P P T O O R O PZ C U T A C Y S L Ó AL EL CALLE A D AAE06 PASAJE R E ABONA L LA PZ E CALLE 06 D A E N G L E TANZA D L G O A S MA C I C O CALLE TACORONTE CALLE AJ R U PZ CALLE 07 M 02 A CALLE 06 R Z E T E E E R LA ALLE R R A L C C L É PZ TEJINA E N L P A L Ó ENEZUELA C A R CALLE 07 V TEGUESTE C D AJ A P S C/ VIRGEN DE A O LA CONCEPCIÓN O Ñ PZ CALLE O T I CALLE M I A PZ A CALLE V N L N Á AL O EMIGRANTES LOS CALLE A PZ E C/ VIRGEN E FÁTIM I B -

Volcanic Tsunami Generating Source Mechanisms in the Eastern Caribbean Region
VOLCANIC TSUNAMI GENERATING SOURCE MECHANISMS IN THE EASTERN CARIBBEAN REGION George Pararas-Carayannis Honolulu, Hawaii, USA ABSTRACT Earthquakes, volcanic eruptions, volcanic island flank failures and underwater slides have generated numerous destructive tsunamis in the Caribbean region. Convergent, compressional and collisional tectonic activity caused primarily from the eastward movement of the Caribbean Plate in relation to the North American, Atlantic and South American Plates, is responsible for zones of subduction in the region, the formation of island arcs and the evolution of particular volcanic centers on the overlying plate. The inter-plate tectonic interaction and deformation along these marginal boundaries result in moderate seismic and volcanic events that can generate tsunamis by a number of different mechanisms. The active geo-dynamic processes have created the Lesser Antilles, an arc of small islands with volcanoes characterized by both effusive and explosive activity. Eruption mechanisms of these Caribbean volcanoes are complex and often anomalous. Collapses of lava domes often precede major eruptions, which may vary in intensity from Strombolian to Plinian. Locally catastrophic, short-period tsunami-like waves can be generated directly by lateral, direct or channelized volcanic blast episodes, or in combination with collateral air pressure perturbations, nuéss ardentes, pyroclastic flows, lahars, or cascading debris avalanches. Submarine volcanic caldera collapses can also generate locally destructive tsunami waves. Volcanoes in the Eastern Caribbean Region have unstable flanks. Destructive local tsunamis may be generated from aerial and submarine volcanic edifice mass edifice flank failures, which may be triggered by volcanic episodes, lava dome collapses, or simply by gravitational instabilities. The present report evaluates volcanic mechanisms, resulting flank failure processes and their potential for tsunami generation.