The Past, Evolving Present and Future of Discrete Logarithm
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Polynomial Sequences of Binomial Type and Path Integrals
Preprint math/9808040, 1998 LEEDS-MATH-PURE-2001-31 Polynomial Sequences of Binomial Type and Path Integrals∗ Vladimir V. Kisil† August 8, 1998; Revised October 19, 2001 Abstract Polynomial sequences pn(x) of binomial type are a principal tool in the umbral calculus of enumerative combinatorics. We express pn(x) as a path integral in the “phase space” N × [−π,π]. The Hamilto- ∞ ′ inφ nian is h(φ)= n=0 pn(0)/n! e and it produces a Schr¨odinger type equation for pn(x). This establishes a bridge between enumerative P combinatorics and quantum field theory. It also provides an algorithm for parallel quantum computations. Contents 1 Introduction on Polynomial Sequences of Binomial Type 2 2 Preliminaries on Path Integrals 4 3 Polynomial Sequences from Path Integrals 6 4 Some Applications 10 arXiv:math/9808040v2 [math.CO] 22 Oct 2001 ∗Partially supported by the grant YSU081025 of Renessance foundation (Ukraine). †On leave form the Odessa National University (Ukraine). Keywords and phrases. Feynman path integral, umbral calculus, polynomial sequence of binomial type, token, Schr¨odinger equation, propagator, wave function, cumulants, quantum computation. 2000 Mathematics Subject Classification. Primary: 05A40; Secondary: 05A15, 58D30, 81Q30, 81R30, 81S40. 1 Polynomial Sequences and Path Integrals 2 Under the inspiring guidance of Feynman, a short- hand way of expressing—and of thinking about—these quantities have been developed. Lewis H. Ryder [22, Chap. 5]. 1 Introduction on Polynomial Sequences of Binomial Type The umbral calculus [16, 18, 19, 21] in enumerative combinatorics uses poly- nomial sequences of binomial type as a principal ingredient. A polynomial sequence pn(x) is said to be of binomial type [18, p. -

Improvements in Computing Discrete Logarithms in Finite Fields
ISSN (Print): 2476-8316 ISSN (Online): 2635-3490 Dutse Journal of Pure and Applied Sciences (DUJOPAS), Vol. 5 No. 1a June 2019 Improvements in Computing Discrete Logarithms in Finite Fields 1*Ali Maianguwa Shuaibu, 2Sunday Babuba & 3James Andrawus 1, 2,3 Department of Mathematics, Federal University Dutse, Jigawa State Email: [email protected] Abstract The discrete logarithm problem forms the basis of numerous cryptographic systems. The most efficient attack on the discrete logarithm problem in the multiplicative group of a finite field is via the index calculus. In this paper, we examined a non-generic algorithm that uses index calculus. If α is a generator × × for 퐹푝 then the discrete logarithm of 훽 ∈ 퐹푝 with respect to 훼 is also called the index of 훽 (with respect to 훼), whence the term index calculus. This algorithm depends critically on the distribution of smooth numbers (integers with small prime factors), which naturally leads to a discussion of two algorithms for factoring integers that also depend on smooth numbers: the Pollard 푝 − 1method and the elliptic curve method. In conclusion, we suggest improved elliptic curve as well as hyperelliptic curve cryptography methods as fertile ground for further research. Keywords: Elliptic curve, Index calculus, Multiplicative group, Smooth numbers Introduction 푥 It is known that the logarithm 푙표푔푏 푎 is a number x such that 푏 = 푎, for given numbers a and b. Similarly, in any group G, powers 푏푘 can be defined for all integers 푘, and 푘 the discrete logarithm푙표푔푏 푎 is an integer k such that 푏 = 푎. In number theory,푥 = 푥 푖푛푑푟푎(푚표푑 푚) is read as the index of 푎 to the base r modulo m which is equivalent to 푟 = 푎(푚표푑 푚) if r is the primitive root of m and greatest common divisor, 푔푐푑( 푎, 푚) = 1. -

The Index Calculus Method Using Non-Smooth Polynomials
MATHEMATICS OF COMPUTATION Volume 70, Number 235, Pages 1253{1264 S 0025-5718(01)01298-4 Article electronically published on March 7, 2001 THE INDEX CALCULUS METHOD USING NON-SMOOTH POLYNOMIALS THEODOULOS GAREFALAKIS AND DANIEL PANARIO Abstract. We study a generalized version of the index calculus method for n the discrete logarithm problem in Fq ,whenq = p , p is a small prime and n !1. The database consists of the logarithms of all irreducible polynomials of degree between given bounds; the original version of the algorithm uses lower bound equal to one. We show theoretically that the algorithm has the same asymptotic running time as the original version. The analysis shows that the best upper limit for the interval coincides with the one for the original version. The lower limit for the interval remains a free variable of the process. We provide experimental results that indicate practical values for that bound. We also give heuristic arguments for the running time of the Waterloo variant and of the Coppersmith method with our generalized database. 1. Introduction Let G denote a group written multiplicatively and hgi the cyclic subgroup gen- erated by g 2 G.Giveng and y 2hgi,thediscrete logarithm problem for G is to find the smallest integer x such that y = gx.Theintegerx is called the discrete logarithm of y in the base g, and is written x =logg y. The main reason for the intense current interest on the discrete logarithm prob- lem (apart from being interesting on a purely mathematical level) is that the se- curity of many public-key cryptosystems depends on the assumption that finding discrete logarithms is hard, at least for certain groups. -

A Public-Key Cryptosystem Based on Discrete Logarithm Problem Over Finite Fields 퐅퐩퐧
IOSR Journal of Mathematics (IOSR-JM) e-ISSN: 2278-5728, p-ISSN: 2319-765X. Volume 11, Issue 1 Ver. III (Jan - Feb. 2015), PP 01-03 www.iosrjournals.org A Public-Key Cryptosystem Based On Discrete Logarithm Problem over Finite Fields 퐅퐩퐧 Saju M I1, Lilly P L2 1Assistant Professor, Department of Mathematics, St. Thomas’ College, Thrissur, India 2Associate professor, Department of Mathematics, St. Joseph’s College, Irinjalakuda, India Abstract: One of the classical problems in mathematics is the Discrete Logarithm Problem (DLP).The difficulty and complexity for solving DLP is used in most of the cryptosystems. In this paper we design a public key system based on the ring of polynomials over the field 퐹푝 is developed. The security of the system is based on the difficulty of finding discrete logarithms over the function field 퐹푝푛 with suitable prime p and sufficiently large n. The presented system has all features of ordinary public key cryptosystem. Keywords: Discrete logarithm problem, Function Field, Polynomials over finite fields, Primitive polynomial, Public key cryptosystem. I. Introduction For the construction of a public key cryptosystem, we need a finite extension field Fpn overFp. In our paper [1] we design a public key cryptosystem based on discrete logarithm problem over the field F2. Here, for increasing the complexity and difficulty for solving DLP, we made a proper additional modification in the system. A cryptosystem for message transmission means a map from units of ordinary text called plaintext message units to units of coded text called cipher text message units. The face of cryptography was radically altered when Diffie and Hellman invented an entirely new type of cryptography, called public key [Diffie and Hellman 1976][2]. -
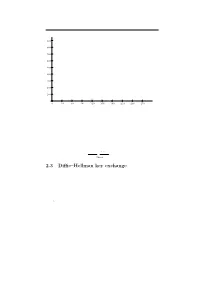
2.3 Diffie–Hellman Key Exchange
2.3. Di±e{Hellman key exchange 65 q q q q q q 6 q qq q q q q q q 900 q q q q q q q qq q q q q q q q q q q q q q q q q 800 q q q qq q q q q q q q q q qq q q q q q q q q q q q 700 q q q q q q q q q q q q q q q q q q q q q q q q q q qq q 600 q q q q q q q q q q q q qq q q q q q q q q q q q q q q q q q qq q q q q q q q q 500 q qq q q q q q qq q q q q q qqq q q q q q q q q q q q q q qq q q q 400 q q q q q q q q q q q q q q q q q q q q q q q q q 300 q q q q q q q q q q q q q q q q q q qqqq qqq q q q q q q q q q q q 200 q q q q q q q q q q q q q q q q q q q q q q q q q q q q q q q q qq q q qq q q 100 q q q q q q q q q q q q q q q q q q q q q q q q q 0 q - 0 30 60 90 120 150 180 210 240 270 Figure 2.2: Powers 627i mod 941 for i = 1; 2; 3;::: any group and use the group law instead of multiplication. -

RIEMANN's HYPOTHESIS 1. Gauss There Are 4 Prime Numbers Less
RIEMANN'S HYPOTHESIS BRIAN CONREY 1. Gauss There are 4 prime numbers less than 10; there are 25 primes less than 100; there are 168 primes less than 1000, and 1229 primes less than 10000. At what rate do the primes thin out? Today we use the notation π(x) to denote the number of primes less than or equal to x; so π(1000) = 168. Carl Friedrich Gauss in an 1849 letter to his former student Encke provided us with the answer to this question. Gauss described his work from 58 years earlier (when he was 15 or 16) where he came to the conclusion that the likelihood of a number n being prime, without knowing anything about it except its size, is 1 : log n Since log 10 = 2:303 ::: the means that about 1 in 16 seven digit numbers are prime and the 100 digit primes are spaced apart by about 230. Gauss came to his conclusion empirically: he kept statistics on how many primes there are in each sequence of 100 numbers all the way up to 3 million or so! He claimed that he could count the primes in a chiliad (a block of 1000) in 15 minutes! Thus we expect that 1 1 1 1 π(N) ≈ + + + ··· + : log 2 log 3 log 4 log N This is within a constant of Z N du li(N) = 0 log u so Gauss' conjecture may be expressed as π(N) = li(N) + E(N) Date: January 27, 2015. 1 2 BRIAN CONREY where E(N) is an error term. -

Making NTRU As Secure As Worst-Case Problems Over Ideal Lattices
Making NTRU as Secure as Worst-Case Problems over Ideal Lattices Damien Stehlé1 and Ron Steinfeld2 1 CNRS, Laboratoire LIP (U. Lyon, CNRS, ENS Lyon, INRIA, UCBL), 46 Allée d’Italie, 69364 Lyon Cedex 07, France. [email protected] – http://perso.ens-lyon.fr/damien.stehle 2 Centre for Advanced Computing - Algorithms and Cryptography, Department of Computing, Macquarie University, NSW 2109, Australia [email protected] – http://web.science.mq.edu.au/~rons Abstract. NTRUEncrypt, proposed in 1996 by Hoffstein, Pipher and Sil- verman, is the fastest known lattice-based encryption scheme. Its mod- erate key-sizes, excellent asymptotic performance and conjectured resis- tance to quantum computers could make it a desirable alternative to fac- torisation and discrete-log based encryption schemes. However, since its introduction, doubts have regularly arisen on its security. In the present work, we show how to modify NTRUEncrypt to make it provably secure in the standard model, under the assumed quantum hardness of standard worst-case lattice problems, restricted to a family of lattices related to some cyclotomic fields. Our main contribution is to show that if the se- cret key polynomials are selected by rejection from discrete Gaussians, then the public key, which is their ratio, is statistically indistinguishable from uniform over its domain. The security then follows from the already proven hardness of the R-LWE problem. Keywords. Lattice-based cryptography, NTRU, provable security. 1 Introduction NTRUEncrypt, devised by Hoffstein, Pipher and Silverman, was first presented at the Crypto’96 rump session [14]. Although its description relies on arithmetic n over the polynomial ring Zq[x]=(x − 1) for n prime and q a small integer, it was quickly observed that breaking it could be expressed as a problem over Euclidean lattices [6]. -

The Discrete Log Problem and Elliptic Curve Cryptography
THE DISCRETE LOG PROBLEM AND ELLIPTIC CURVE CRYPTOGRAPHY NOLAN WINKLER Abstract. In this paper, discrete log-based public-key cryptography is ex- plored. Specifically, we first examine the Discrete Log Problem over a general cyclic group and algorithms that attempt to solve it. This leads us to an in- vestigation of the security of cryptosystems based over certain specific cyclic × groups: Fp, Fp , and the cyclic subgroup generated by a point on an elliptic curve; we ultimately see the highest security comes from using E(Fp) as our group. This necessitates an introduction of elliptic curves, which is provided. Finally, we conclude with cryptographic implementation considerations. Contents 1. Introduction 2 2. Public-Key Systems Over a Cyclic Group G 3 2.1. ElGamal Messaging 3 2.2. Diffie-Hellman Key Exchanges 4 3. Security & Hardness of the Discrete Log Problem 4 4. Algorithms for Solving the Discrete Log Problem 6 4.1. General Cyclic Groups 6 × 4.2. The cyclic group Fp 9 4.3. Subgroup Generated by a Point on an Elliptic Curve 10 5. Elliptic Curves: A Better Group for Cryptography 11 5.1. Basic Theory and Group Law 11 5.2. Finding the Order 12 6. Ensuring Security 15 6.1. Special Cases and Notes 15 7. Further Reading 15 8. Acknowledgments 15 References 16 1 2 NOLAN WINKLER 1. Introduction In this paper, basic knowledge of number theory and abstract algebra is assumed. Additionally, rather than beginning from classical symmetric systems of cryptog- raphy, such as the famous Caesar or Vigni`ere ciphers, we assume a familiarity with these systems and why they have largely become obsolete on their own. -

Sieve Algorithms for the Discrete Logarithm in Medium Characteristic Finite Fields Laurent Grémy
Sieve algorithms for the discrete logarithm in medium characteristic finite fields Laurent Grémy To cite this version: Laurent Grémy. Sieve algorithms for the discrete logarithm in medium characteristic finite fields. Cryptography and Security [cs.CR]. Université de Lorraine, 2017. English. NNT : 2017LORR0141. tel-01647623 HAL Id: tel-01647623 https://tel.archives-ouvertes.fr/tel-01647623 Submitted on 24 Nov 2017 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. AVERTISSEMENT Ce document est le fruit d'un long travail approuvé par le jury de soutenance et mis à disposition de l'ensemble de la communauté universitaire élargie. Il est soumis à la propriété intellectuelle de l'auteur. Ceci implique une obligation de citation et de référencement lors de l’utilisation de ce document. D'autre part, toute contrefaçon, plagiat, reproduction illicite encourt une poursuite pénale. Contact : [email protected] LIENS Code de la Propriété Intellectuelle. articles L 122. 4 Code de la Propriété Intellectuelle. articles L 335.2- L 335.10 http://www.cfcopies.com/V2/leg/leg_droi.php -

Index Calculus in the Trace Zero Variety 3
INDEX CALCULUS IN THE TRACE ZERO VARIETY ELISA GORLA AND MAIKE MASSIERER Abstract. We discuss how to apply Gaudry’s index calculus algorithm for abelian varieties to solve the discrete logarithm problem in the trace zero variety of an elliptic curve. We treat in particular the practically relevant cases of field extensions of degree 3 or 5. Our theoretical analysis is compared to other algorithms present in the literature, and is complemented by results from a prototype implementation. 1. Introduction Given an elliptic curve E defined over a finite field Fq, consider the group E(Fqn ) of rational points over a field extension of prime degree n. Since E is defined over Fq, the group E(Fqn ) contains the subgroup E(Fq) of Fq-rational points of E. Moreover, it contains the subgroup Tn of − points P E(F n ) whose trace P + ϕ(P )+ ... + ϕn 1(P ) is zero, where ϕ denotes the Frobenius ∈ q homomorphism on E. The group Tn is called the trace zero subgroup of E(Fqn ), and it is the group of Fq-rational points of the trace zero variety relative to the field extension Fqn Fq. In this paper, we study the hardness of the DLP in the trace zero variety. Our| interest in this question has several motivations. First of all, supersingular trace zero varieties can achieve higher security per bit than supersingular elliptic curves, as shown by Rubin and Silverberg in [RS02, RS09] and by Avanzi and Cesena in [AC07, Ces10]. Ideally, in pairing-based proto- F∗ cols the embedding degree k is such that the DLP in Tn and in qkn have the same complexity. -

Integer Factorization and Computing Discrete Logarithms in Maple
Integer Factorization and Computing Discrete Logarithms in Maple Aaron Bradford∗, Michael Monagan∗, Colin Percival∗ [email protected], [email protected], [email protected] Department of Mathematics, Simon Fraser University, Burnaby, B.C., V5A 1S6, Canada. 1 Introduction As part of our MITACS research project at Simon Fraser University, we have investigated algorithms for integer factorization and computing discrete logarithms. We have implemented a quadratic sieve algorithm for integer factorization in Maple to replace Maple's implementation of the Morrison- Brillhart continued fraction algorithm which was done by Gaston Gonnet in the early 1980's. We have also implemented an indexed calculus algorithm for discrete logarithms in GF(q) to replace Maple's implementation of Shanks' baby-step giant-step algorithm, also done by Gaston Gonnet in the early 1980's. In this paper we describe the algorithms and our optimizations made to them. We give some details of our Maple implementations and present some initial timings. Since Maple is an interpreted language, see [7], there is room for improvement of both implementations by coding critical parts of the algorithms in C. For example, one of the bottle-necks of the indexed calculus algorithm is finding and integers which are B-smooth. Let B be a set of primes. A positive integer y is said to be B-smooth if its prime divisors are all in B. Typically B might be the first 200 primes and y might be a 50 bit integer. ∗This work was supported by the MITACS NCE of Canada. 1 2 Integer Factorization Starting from some very simple instructions | \make integer factorization faster in Maple" | we have implemented the Quadratic Sieve factoring al- gorithm in a combination of Maple and C (which is accessed via Maple's capabilities for external linking). -
Computation and the Riemann Hypothesis: Dedicated to Herman Te Riele on the Occasion of His Retirement
Computation and the Riemann Hypothesis: Dedicated to Herman te Riele on the occasion of his retirement Andrew Odlyzko School of Mathematics University of Minnesota [email protected] http://www.dtc.umn.edu/∼odlyzko December 2, 2011 Andrew Odlyzko ( School of Mathematics UniversityComputation of Minnesota and [email protected] Riemann Hypothesis: http://www.dtc.umn.edu/ Dedicated toDecember2,2011 Herman te∼ Rieodlyzkole on) the 1/15 occasion The mysteries of prime numbers: Mathematicians have tried in vain to discover some order in the sequence of prime numbers but we have every reason to believe that there are some mysteries which the human mind will never penetrate. To convince ourselves, we have only to cast a glance at tables of primes (which some have constructed to values beyond 100,000) and we should perceive that there reigns neither order nor rule. Euler, 1751 Andrew Odlyzko ( School of Mathematics UniversityComputation of Minnesota and [email protected] Riemann Hypothesis: http://www.dtc.umn.edu/ Dedicated toDecember2,2011 Herman te∼ Rieodlyzkole on) the 2/15 occasion Herman te Riele’s contributions towards elucidating some of the mysteries of primes: numerical verifications of Riemann Hypothesis (RH) improved bounds in counterexamples to the π(x) < Li(x) conjecture disproof and improved lower bounds for Mertens conjecture improved bounds for de Bruijn – Newman constant ... Andrew Odlyzko ( School of Mathematics UniversityComputation of Minnesota and [email protected] Riemann Hypothesis: http://www.dtc.umn.edu/ Dedicated toDecember2,2011