Control of Integrated Powertrain with Electronic Throttle and Automatic Transmission Daekyun Kim, Huei Peng, Shushan Bai, and Joel M
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

The Design and Validation of Engine Intake Manifold Using Physical
International Journal of Automobile Engineering Research and Development (IJAuERD) ISSN (P): 2277–4785; ISSN (E): 2278–9413 Vol. 9, Issue 2, Dec 2019, 1–10 © TJPRC Pvt. Ltd. THE DESIGN AND VALIDATION OF ENGINE INTAKE MANIFOLD USING PHYSICAL EXPERIMENT AND CFD GURU DEEP SINGH, KESHAV KAUSHIK & PRADEEP KUMAR JAIN Department of Mechanical Engineering, Delhi Technological University, Main Bawana Road, New Delhi, India, ABSTRACT Race-car engineers aim to design an intake manifold which can maintain both low-end and top-end power without compromising the responsiveness of the engine throughout the power band. A major obstacle in achieving this goal is the rule requirement by FSAE for the mandatory presence of air intake restrictor which limits top-end power. In this paper, the selection criteria for design parameters such as runner length, plenum volume and intake geometry have been discussed. The effect of runner length and plenum volume on throttle response and manifold pressure has been studied through a physical exp. on a prototype variable geometry intake manifold. CFD simulations have been performed on ANSYS CFX to optimize the geometry for venturi and plenum. The geometry for which there was minimum pressure loss and maximum mass flow rate was chosen in the final design. The adopted approach was Original Article Article Original validated by conducting the same exp. on the designed intake manifold. KEYWORDS: Air Intake Manifold, CFD, FSAE, Engine, Converging- Diverging Nozzle & Variable Length Intake Manifold Received: Jun 13, 2019; Accepted: Jul 04, 2019; Published: Jul 22, 2019; Paper Id.: IJAuERDDEC20191 1. INTRODUCTION FSAE is the largest engineering design competition in the world which gives students an opportunity to design and manufacture a race pertaining to a series of rules whose purpose is both to ensure on-site event operations and promote clever problem solving. -
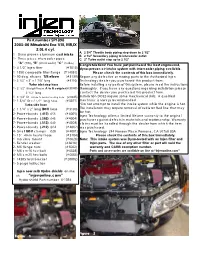
Installation Instructions
Part number SP1898 2003-06 Mitsubishi Evo VIII, MR,IX 2.0L 4 cyl. A. 2 3/4” Throttle body piping step down to 2 1/2” 1- Dyno-proven aluminum cast intake B. 2 1/2” Secondary piping to intercooler outlet 1- Three piece intercooler pipes C. 2” Turbo outlet step up to 2 1/2” “A” (T/B), “B” (intercooler) “C” (turbo) Congratulations! You have just purchased the best engineered, 1- 4 1/2” Injen filter (#1018) dyno-proven air intake system with intercooler piping available. 1- 1890 composite filter flange (#14031) Please check the contents of this box immediately. 1- 90 deg. silicone T/B elbow (#3139) Report any defective or missing parts to the Authorized Injen 1- 2 1/2” x 3” x 1 7/8” long (#3110) Technology dealer you purchased this product from. Turbo inlet step hose Before installing any parts of this system, please read the instructions 1- 2 1/2” straight hose A to B coupler(#3048) thoroughly. If you have any questions regarding installation please 2 1/2” long contact the dealer you purchased this product from. 1- 3 1/4” ID intake to sensor housing hose (#3045) Installation DOES require some mechanical skills. A qualified 1- 1 3/4” ID x 2 1/2” long hose (#3071) mechanic is always recommended. Turbo side hose *Do not attempt to install the intake system while the engine is hot. 2- 1 1/4” x 2” long BOV hose (#3100) The installation may require removal of radiator fluid line that may be hot. -

Modern Design and Control of Automatic Transmission and The
Review Paper doi:10.5937/jaes13-7727 Paper number: 13(2015)1, 313, 51 - 59 MODERN DESIGN AND CONTROL OF AUTOMATIC TRANSMISSION AND THE PROSPECTS OF DEVELOPMENT Dejan Matijević The School of Electrical and Computer Engineering of Applied Studies, Belgrade, Serbia Ivan Ivanković* University of Belgrade, Faculty of Mechanical Engineering, Belgrade, Serbia Dr Vladimir Popović University of Belgrade, Faculty of Mechanical Engineering, Belgrade, Serbia The paper provides an overview of modern technical solutions of automatic transmissions in auto- motive industry with their influence on sustainable development. The objective of the first section is a structural view of specific constructions and control systems of presently used automatic transmis- sions, with emphasis on mechatronics implementation. The second section is based on perspectives of development, by integrating some branches of soft computing, such as fuzzy logic and artificial neural networks in order to create an optimal control algorithm for obtaining a contribution to fuel economy, exhaust emission, comfort and vehicle performance. Key words: Automatic transmission, Mechatronics, Automotive industry, Soft Computing INTRODUCTION which is depended by coefficient of friction and normal load on the drive axle. Lower limitation Almost all automobiles in use today are driven by is defined by maximal speed that vehicle can internal combustion engines, which are charac- reach. Shaded areas between traction forces terized by many advantages, such as relatively through gears are power losses. To decrease good efficiency, relatively compact energy stor- power losses and to be as closely as possible age and high power – to – weight ratio [07]. to the ideal traction hyperbola, the gearbox with But, fundamental disadvantages are: enough gear ratios is needed. -

Matching of Internal Combustion Engine
CRANFIELD UNIVERSITY BAPTISTE BONNET MATCHING OF INTERNAL COMBUSTION ENGINE CHARACTERISTICS FOR CONTINUOUSLY VARIABLE TRANSMISSIONS SCHOOL OF ENGINEERING PHD THESIS CRANFIELD UNIVERSITY SCHOOL OF ENGINEERING, AUTOMOTIVE DEPARTMENT PHD THESIS BAPTISTE BONNET MATCHING OF INTERNAL COMBUSTION ENGINE CHARACTERISTICS FOR CONTINUOUSLY VARIABLE TRANSMISSIONS SUPERVISOR: PROF. NICHOLAS VAUGHAN 2007 This thesis is submitted in partial fulfilment of the requirements for the Degree of Doctor in Philosophy. © Cranfield University, 2007. All rights reserved. No part of this publication may be reproduced without the written permission of the copyright holder . PhD Thesis Abstract ABSTRACT This work proposes to match the engine characteristics to the requirements of the Continuously Variable Transmission [CVT] powertrain. The normal process is to pair the transmission to the engine and modify its calibration without considering the full potential to modify the engine. On the one hand continuously variable transmissions offer the possibility to operate the engine closer to its best efficiency. They benefit from the high versatility of the effective speed ratio between the wheel and the engine to match a driver requested power. On the other hand, this concept demands slightly different qualities from the gasoline or diesel engine. For instance, a torque margin is necessary in most cases to allow for engine speed controllability and transients often involve speed and torque together. The necessity for an appropriate engine matching approach to the CVT powertrain is justified in this thesis and supported by a survey of the current engineering trends with particular emphasis on CVT prospects. The trends towards a more integrated powertrain control system are highlighted, as well as the requirements on the engine behaviour itself. -

403D-11 Industrial Open Power Unit
403D-11 Industrial Open Power Unit 13.7-21 kW (18.4-28.2 hp) @ 2800-3000 rpm EU Stage IIIA/U.S. EPA Tier 4 Interim equivalent The Perkins 400 Series is an extensive family of engines in the 0.5-2.2 litre range. The 3 cylinder 403-11 model is one of Perkins smallest engines, combining performance, low operating costs and an ultra-compact package. From a packaging point of view, the 403-11 is the ideal engine for small industrial applications. Its simple, robust mechanical fuel system makes it easy to install and maintain. A powerful but quiet 1.1 litre engine complete with radiator cooled unit. Designed to meet EU Stage IIIA/U.S. EPA Tier 4 Interim equivalent emission standards. Specifications Power Rating Minimum power 15.1 kW 20.2 hp Maximum power 18.1 kW 24.3 hp Rated speed 2800-3000 rpm Maximum torque 64.6 Nm @ 2100 rpm 47.6 lb-ft @ 2100 rpm Emission Standards Emissions U.S. EPA Tier 4 Interim equivalent. Less than 19 kW, EU certification not required. General Number of cylinders 3 inline Bore 77 mm 3 in Stroke 81 mm 3.2 in Displacement 1.1 litres 69 cubic in Aspiration Naturally aspirated Cycle 4 stroke Compression ratio 22.7:1 Combustion system Indirect injection Rotation (from flywheel end) Anti-clockwise www.perkins.com Photographs are for illustrative purposes only and may not reflect final specification. All information is substantially correct at time of printing and may be altered subsequently. Final weights and dimensions will depend on completed specification. -
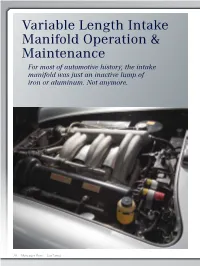
Variable Length Intake Manifold Operation & Maintenance
Variable Length Intake Manifold Operation & Maintenance For most of automotive history, the intake manifold was just an inactive lump of iron or aluminum. Not anymore. 28 Mercedes-Benz StarTuned The history of the air intake manifold had These offered an advantage beyond light weight been largely uneventful. For many decades, the in that they have better thermal properties. design remained pretty much the same with They can run much cooler than aluminum, sparse innovation. It was simply plumbing improving air charge density, which can be that made the air/fuel charge available to blended with additional fuel to produce more the combustion chambers willy-nilly with power. In addition, plastics can be molded into little thought devoted to how far each intake more complex shapes than the sand casting of valve was from the typical centrally-located aluminum allows. This gives greater flexibility carburetor. The simplest way to understand this during the engineering process. function is to think of the internal combustion engine as what it is: an air pump. Magnesium alloy is another innovation that is becoming popular in certain applications. As an engine piston moves down on the Magnesium parts have been around for maybe intake stroke, a vacuum occurs the strength a century, but recent advances in high-pressure of which depends on atmospheric pressure casting have made it a favorable material. The at that time and location. In a carbureted or advantages of magnesium are its light weight throttle-body injected engine, this atmospheric along with strength and rigidity. Good thermal pressure forces the air/fuel mixture through and acoustic properties are added benefits. -

Analysis and Simulation of a Torque Assist Automated Manual Transmission
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by PORTO Publications Open Repository TOrino Post print (i.e. final draft post-refereeing) version of an article published on Mechanical Systems and Signal Processing. Beyond the journal formatting, please note that there could be minor changes from this document to the final published version. The final published version is accessible from here: http://dx.doi.org/10.1016/j.ymssp.2010.12.014 This document has made accessible through PORTO, the Open Access Repository of Politecnico di Torino (http://porto.polito.it), in compliance with the Publisher's copyright policy as reported in the SHERPA- ROMEO website: http://www.sherpa.ac.uk/romeo/issn/0888-3270/ Analysis and Simulation of a Torque Assist Automated Manual Transmission E. Galvagno, M. Velardocchia, A. Vigliani Dipartimento di Meccanica - Politecnico di Torino C.so Duca degli Abruzzi, 24 - 10129 Torino - ITALY email: [email protected] Keywords assist clutch automated manual transmission power-shift transmission torque gap filler drivability Abstract The paper presents the kinematic and dynamic analysis of a power-shift Automated Manual Transmission (AMT) characterised by a wet clutch, called Assist-Clutch (ACL), replacing the fifth gear synchroniser. This torque-assist mechanism becomes a torque transfer path during gearshifts, in order to overcome a typical dynamic problem of the AMTs, that is the driving force interruption. The mean power contributions during gearshifts are computed for different engine and ACL interventions, thus allowing to draw considerations useful for developing the control algorithms. The simulation results prove the advantages in terms of gearshift quality and ride comfort of the analysed transmission. -
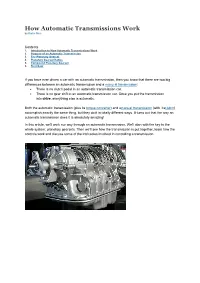
How Automatic Transmissions Work by Karim Nice
How Automatic Transmissions Work by Karim Nice Contents 1. Introduction to How Automatic Transmissions Work 2. Purpose of an Automatic Transmission 3. The Planetary Gearset 4. Planetary Gearset Ratios 5. Compound Planetary Gearset 6. First Gear If you have ever driven a car with an automatic transmission, then you know that there are two big differences between an automatic transmission and a manu al transmission: There is no clutch pedal in an automatic transmission car. There is no gear shift in an automatic transmission car. Once you put the transmission into drive, everything else is automatic. Both the automatic transmission (plus its torque converter) and amanual transmission (with itsclutch) accomplish exactly the same thing, but they do it in totally different ways. It turns out that the way an automatic transmission does it is absolutely amazing! In this article, we'll work our way through an automatic transmission. We'll start with the key to the whole system: planetary gearsets. Then we'll see how the transmission is put together, learn how the controls work and discuss some of the intricacies involved in controlling a transmission. Purpose of an Automatic Transmission Location of the automatic transmission. Just like that of a manual transmission, the automatic transmission's primary job is to allow the engine to operate in its narrow range of speeds while providing a wide range of output speeds. Without a transmission, cars would be limited to one gear ratio, and that ratio would have to be selected to allow the car to travel at the desired top speed. -

Y ...Signature Redacted
Modeling Brake Specific Fuel Consumption to Support Exploration of Doubly Fed Electric Machines in Naval Engineering Applications by Michael R. Rowles, Jr. B.E., Electrical Engineering, Naval Architecture, State University of New York, Maritime College, 2006 Submitted to the Department of Mechanical Engineering in Partial Fulfillment of the Requirements for the Degrees of Naval Engineer and Master of Science in Naval Architecture and Marine Engineering at the MASSACHUSETTS INSTITUTE OF TECHNOLOGY June 2016. 2016 Michael R. Rowles, Jr. All rights reserved. The author hereby grants to MIT permission to reproduce and to distribute publicly paper and electronic copies of this thesis document in whole or in part in any medium now known or hereafter c: A uth or ........................................... Signature redacted Department of Mechanical Engineering A may 22,k 2016 C ertified by ............................ Signature redacted .... Weston L. Gray, CDR, USN Associate Professor of the Practice, Naval Construction and Engineering redacted ..Thesis Reader Certified by .......... Signature Ll James L. Kirtley Professor of Electrical Engineering redacted Isis Supervisor Accepted by ............ SSignatu gnatu re ...................... Rohan Abeyaratne MASSACHUSETTS INSTITUTE Chairman, Committee on Graduate Students OF TECHNOLOGY Quentin Berg Professor of Mechanics Department of Mechanical Engineering JUN 02 2016 LIBRARIES ARCHIVES Modeling Brake Specific Fuel Consumption to Support Exploration of Doubly Fed Electric Machines in Naval Engineering Applications by Michael R. Rowles, Jr. Submitted to the Department of Mechanical Engineering on May 12, 2016 in Partial Fulfillment of the Requirements for Degrees of Naval Engineer and Master of Science in Mechanical Engineering Abstract The dynamic operational nature of naval power and propulsion requires Ship Design and Program Managers to design and select prime movers using a much more complex speed profile rather than typical of commercial vessels. -

Variable Automatic Gearbox Multitronic 01J Self
228 228 Service. Variable Automatic Gearbox multitronic® 01J Design and Function Self-Study Programme 228 All rights reserved. Technical specifications subject to change without notice. AUDI AG Dept. I/VK-5 D-85045 Ingolstadt Fax +49 (0)841/89-36367 940.2810.47.20 Technical status: 09/99 Printed in Germany For internal use only multitronic® The name multitronic® stands for the new The CVT concept improved by Audi is based variable automatic gearbox developed by on the long-established principle of the Audi. “chain drive transmission”. According to this The variable automatic gearbox is commonly principle, the reduction ratio between the known as the CVT gearbox. shortest and the longest ratio can be controlled steplessly by means of a so-called “variator”. CVT is the English abbreviation for “Continuously Variable Transmission”. 228_023 The new Audi multitronic® with Tiptronic function offers a synergy of the best possible dynamics, optimal fuel utilisation and the highest possible level of drive comfort. 2 Contents Page Introduction multitronic® ............................................................................ 2 The gearbox concept .............................................................. 9 Specifications ........................................................................10 Gearbox modules The flywheel damper unit .................................................... 11 Sectional view of gearbox ....................................................13 The forward clutch/reverse clutch with planetary gear train .................................................... -

Transmission (Mechanics) - Wikipedia 8/28/20, 1�19 PM
Transmission (mechanics) - Wikipedia 8/28/20, 119 PM Transmission (mechanics) A transmission is a machine in a power transmission system, which provides controlled application of the power. Often the term 5 speed transmission refers simply to the gearbox that uses gears and gear trains to provide speed and torque conversions from a rotating power source to another device.[1][2] In British English, the term transmission refers to the whole drivetrain, including clutch, gearbox, prop shaft (for rear-wheel drive), differential, and final drive shafts. In American English, however, the term refers more specifically to the gearbox alone, and detailed Single stage gear reducer usage differs.[note 1] The most common use is in motor vehicles, where the transmission adapts the output of the internal combustion engine to the drive wheels. Such engines need to operate at a relatively high rotational speed, which is inappropriate for starting, stopping, and slower travel. The transmission reduces the higher engine speed to the slower wheel speed, increasing torque in the process. Transmissions are also used on pedal bicycles, fixed machines, and where different rotational speeds and torques are adapted. Often, a transmission has multiple gear ratios (or simply "gears") with the ability to switch between them as speed varies. This switching may be done manually (by the operator) or automatically. Directional (forward and reverse) control may also be provided. Single-ratio transmissions also exist, which simply change the speed and torque (and sometimes direction) of motor output. In motor vehicles, the transmission generally is connected to the engine crankshaft via a flywheel or clutch or fluid coupling, partly because internal combustion engines cannot run below a particular speed. -
Jennings: Two-Stroke Tuner's Handbook
Two-Stroke TUNER’S HANDBOOK By Gordon Jennings Illustrations by the author Copyright © 1973 by Gordon Jennings Compiled for reprint © 2007 by Ken i PREFACE Many years have passed since Gordon Jennings first published this manual. Its 2007 and although there have been huge technological changes the basics are still the basics. There is a huge interest in vintage snowmobiles and their “simple” two stroke power plants of yesteryear. There is a wealth of knowledge contained in this manual. Let’s journey back to 1973 and read the book that was the two stroke bible of that era. Decades have passed since I hung around with John and Jim. John and I worked for the same corporation and I found a 500 triple Kawasaki for him at a reasonable price. He converted it into a drag bike, modified the engine completely and added mikuni carbs and tuned pipes. John borrowed Jim’s copy of the ‘Two Stoke Tuner’s Handbook” and used it and tips from “Fast by Gast” to create one fast bike. John kept his 500 until he retired and moved to the coast in 2005. The whereabouts of Wild Jim, his 750 Kawasaki drag bike and the only copy of ‘Two Stoke Tuner’s Handbook” that I have ever seen is a complete mystery. I recently acquired a 1980 Polaris TXL and am digging into the inner workings of the engine. I wanted a copy of this manual but wasn’t willing to wait for a copy to show up on EBay. Happily, a search of the internet finally hit on a Word version of the manual.