Human Leg Model Predicts Muscle Forces, States, and Energetics During Walking
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Hip Extensor Mechanics and the Evolution of Walking and Climbing Capabilities in Humans, Apes, and Fossil Hominins
Hip extensor mechanics and the evolution of walking and climbing capabilities in humans, apes, and fossil hominins Elaine E. Kozmaa,b,1, Nicole M. Webba,b,c, William E. H. Harcourt-Smitha,b,c,d, David A. Raichlene, Kristiaan D’Aoûtf,g, Mary H. Brownh, Emma M. Finestonea,b, Stephen R. Rossh, Peter Aertsg, and Herman Pontzera,b,i,j,1 aGraduate Center, City University of New York, New York, NY 10016; bNew York Consortium in Evolutionary Primatology, New York, NY 10024; cDepartment of Anthropology, Lehman College, New York, NY 10468; dDivision of Paleontology, American Museum of Natural History, New York, NY 10024; eSchool of Anthropology, University of Arizona, Tucson, AZ 85721; fInstitute of Ageing and Chronic Disease, University of Liverpool, Liverpool L7 8TX, United Kingdom; gDepartment of Biology, University of Antwerp, 2610 Antwerp, Belgium; hLester E. Fisher Center for the Study and Conservation of Apes, Lincoln Park Zoo, Chicago, IL 60614; iDepartment of Anthropology, Hunter College, New York, NY 10065; and jDepartment of Evolutionary Anthropology, Duke University, Durham, NC 27708 Edited by Carol V. Ward, University of Missouri-Columbia, Columbia, MO, and accepted by Editorial Board Member C. O. Lovejoy March 1, 2018 (received for review September 10, 2017) The evolutionary emergence of humans’ remarkably economical their effects on climbing performance or tested whether these walking gait remains a focus of research and debate, but experi- traits constrain walking and running performance. mentally validated approaches linking locomotor -
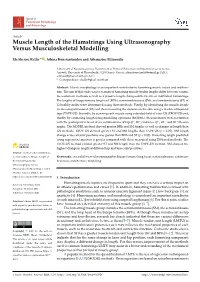
Muscle Length of the Hamstrings Using Ultrasonography Versus Musculoskeletal Modelling
Journal of Functional Morphology and Kinesiology Article Muscle Length of the Hamstrings Using Ultrasonography Versus Musculoskeletal Modelling Eleftherios Kellis * , Athina Konstantinidou and Athanasios Ellinoudis Laboratory of Neuromechanics, Department of Physical Education and Sport Sciences at Serres, Aristotle University of Thessaloniki, 62100 Serres, Greece; [email protected] (A.K.); [email protected] (A.E.) * Correspondence: [email protected] Abstract: Muscle morphology is an important contributor to hamstring muscle injury and malfunc- tion. The aim of this study was to examine if hamstring muscle-tendon lengths differ between various measurement methods as well as if passive length changes differ between individual hamstrings. The lengths of biceps femoris long head (BFlh), semimembranosus (SM), and semitendinosus (ST) of 12 healthy males were determined using three methods: Firstly, by identifying the muscle attach- ments using ultrasound (US) and then measuring the distance on the skin using a flexible ultrasound tape (TAPE-US). Secondly, by scanning each muscle using extended-field-of view US (EFOV-US) and, thirdly, by estimating length using modelling equations (MODEL). Measurements were performed with the participant relaxed at six combinations of hip (0◦, 90◦) and knee (0◦, 45◦, and 90◦) flexion angles. The MODEL method showed greater BFlh and SM lengths as well as changes in length than US methods. EFOV-US showed greater ST and SM lengths than TAPE-US (p < 0.05). SM length change across all joint positions was greater than BFlh and ST (p < 0.05). Hamstring length predicted using regression equations is greater compared with those measured using US-based methods. The EFOV-US method yielded greater ST and SM length than the TAPE-US method. -
Fundamentals of Biomechanics Duane Knudson
Fundamentals of Biomechanics Duane Knudson Fundamentals of Biomechanics Second Edition Duane Knudson Department of Kinesiology California State University at Chico First & Normal Street Chico, CA 95929-0330 USA [email protected] Library of Congress Control Number: 2007925371 ISBN 978-0-387-49311-4 e-ISBN 978-0-387-49312-1 Printed on acid-free paper. © 2007 Springer Science+Business Media, LLC All rights reserved. This work may not be translated or copied in whole or in part without the written permission of the publisher (Springer Science+Business Media, LLC, 233 Spring Street, New York, NY 10013, USA), except for brief excerpts in connection with reviews or scholarly analysis. Use in connection with any form of information storage and retrieval, electronic adaptation, computer software, or by similar or dissimilar methodology now known or hereafter developed is forbidden. The use in this publication of trade names, trademarks, service marks and similar terms, even if they are not identified as such, is not to be taken as an expression of opinion as to whether or not they are subject to proprietary rights. 987654321 springer.com Contents Preface ix NINE FUNDAMENTALS OF BIOMECHANICS 29 Principles and Laws 29 Acknowledgments xi Nine Principles for Application of Biomechanics 30 QUALITATIVE ANALYSIS 35 PART I SUMMARY 36 INTRODUCTION REVIEW QUESTIONS 36 CHAPTER 1 KEY TERMS 37 INTRODUCTION TO BIOMECHANICS SUGGESTED READING 37 OF UMAN OVEMENT H M WEB LINKS 37 WHAT IS BIOMECHANICS?3 PART II WHY STUDY BIOMECHANICS?5 BIOLOGICAL/STRUCTURAL BASES -

The Volume and Distribution of Blood in the Human Leg Measured in Vivo. I. the Effects of Graded External Pressure
THE VOLUME AND DISTRIBUTION OF BLOOD IN THE HUMAN LEG MEASURED IN VIVO. I. THE EFFECTS OF GRADED EXTERNAL PRESSURE Julius Litter, J. Edwin Wood J Clin Invest. 1954;33(5):798-806. https://doi.org/10.1172/JCI102951. Research Article Find the latest version: https://jci.me/102951/pdf THE VOLUME AND DISTRIBUTION OF BLOOD IN THE HUMAN LEG MEASURED IN VIVO. I. THE EFFECTS OF GRADED EXTERNAL PRESSURE 1, 2 By JULIUS LITTER AND J. EDWIN WOOD (From the Department of Medicine, Boston University School of Medicine and the Evans Memorial, Massachusetts Memorial Hospitals, Boston, Mass.) (Submitted for publication July 1, 1953; accepted January 27, 1954) Venous pressure-volume curves obtained by ve- sumption that the volume of a blood vessel varies nous congestion may be useful for the study of ve- directly with the effective intravascular pressure, nous tone in human extremities. However, such if other factors are controlled. This assumption pressure-volume curves should be measured from has been thoroughly validated by Ryder, Molle, and a constant reference point or baseline of venous Ferris using isolated veins (6). volume and effective venous pressure. The purpose of this paper is to show that such a APPARATUS constant baseline is obtained when an external The water plethysmograph (Figure 1) described by pressure equal to or greater than the natural local Wilkins and Eichna (7) was modified at the open ends venous pressure is applied to the leg. This has by replacing the rubber diaphragms (formerly cemented to the skin) with a loose-fitting, thin rubber sleeve (8). been demonstrated by measuring the volume of The ends of the sleeve were everted and permanently sealed blood in the human leg, in vivo, at graded external to the flanges at each end of the plethysmograph. -

Analysis of Reaction Forces in Human Ankle Joint During Gait
MATEC Web of Conferences 112, 07019 (2017) DOI: 10.1051/matecconf/20171120701 9 IManE&E 2017 Analysis of reaction forces in human ankle joint during gait Daniel Ganea, Elena Mereuta, Silvia Veresiu, Madalina Rus, and Valentin Amortila* “Dunarea de Jos” University of Galati, Department of Mechanical Engineering, 111 Domnească Street, Romania Abstract. The paper aims to analyze the human ankle joint reaction forces with a multibody system approach, using MSC Adams software and its features. The paper presents the results provided by the simulation of a spatial mechanical structure, which replicates the human’s locomotion system in terms of bone structure. The mechanical structure used for determining the human ankle joint reaction forces consists of 7 kinematic elements linked by 6 spherical joints constrained to 1 DOF each. 1 Introduction The study of joints forces in human body joints is extremely important for physiotherapists, coaches and athletes. It is often difficult to determine these internal forces using noninvasive methods. However, the inverse dynamics analysis can provide with good approximation the forces in human joints. While direct dynamics is used for determining how human body actuators are used, the inverse dynamic analysis is widely used in estimating joints moments and reaction forces [1, 2]. Using the inverse dynamics approach in human body motion analysis the computational effort is considerable reduced by avoiding the numerical integration of state equations. Unfortunately, the approach is poorly explored in biomechanics [2, 3]. The same method was use by some authors to estimate the force developed by human body actuators [4]. They have used a multibody model with 5 degrees of freedom. -

Analysis of the Hamstring Muscle Activation During Two Injury Prevention Exercises
Journal of Human Kinetics volume 60/2017, 29-37 DOI: 10.1515/hukin-2017-0105 29 Section I – Kinesiology Analysis of the Hamstring Muscle Activation During two Injury Prevention Exercises by Alireza Monajati1, Eneko Larumbe-Zabala2, Mark Goss-Sampson1, Fernando Naclerio1 The aim of this study was to perform an electromyographic and kinetic comparison of two commonly used hamstring eccentric strengthening exercises: Nordic Curl and Ball Leg Curl. After determining the maximum isometric voluntary contraction of the knee flexors, ten female athletes performed 3 repetitions of both the Nordic Curl and Ball Leg Curl, while knee angular displacement and electromyografic activity of the biceps femoris and semitendinosus were monitored. No significant differences were found between biceps femoris and semitendinosus activation in both the Nordic Curl and Ball Leg Curl. However, comparisons between exercises revealed higher activation of both the biceps femoris (74.8 ± 20 vs 50.3 ± 25.7%, p = 0.03 d = 0.53) and semitendinosus (78.3 ± 27.5 vs 44.3 ± 26.6%, p = 0.012, d = 0.63) at the closest knee angles in the Nordic Curl vs Ball Leg Curl, respectively. Hamstring muscles activation during the Nordic Curl increased, remained high (>70%) between 60 to 40° of the knee angle and then decreased to 27% of the maximal isometric voluntary contraction at the end of movement. Overall, the biceps femoris and semitendinosus showed similar patterns of activation. In conclusion, even though the hamstring muscle activation at open knee positions was similar between exercises, the Nordic Curl elicited a higher hamstring activity compared to the Ball Leg Curl. -
Determination of Structural and Functional Thigh Muscle Properties in a Healthy Older Popualtion Using Mri and Isokinetic Dynamometry
DETERMINATION OF STRUCTURAL AND FUNCTIONAL THIGH MUSCLE PROPERTIES IN A HEALTHY OLDER POPUALTION USING MRI AND ISOKINETIC DYNAMOMETRY by KAREN PAMELA RUTH VETTER B. Sc (Biochemistry) The University of British Columbia, 1997 B. Sc (PT) The University of British Columbia, 2000 A THESIS SUBMITTED IN PARTIAL FULFILMENT OF THE REQUIREMENTS FOR THE DEGREE OF MASTER OF SCIENCE in THE FACULTY OF GRADUATE STUDIES (Rehabilitation Sciences) THE UNIVERSITY OF BRITISH COLUMBIA October 2006 © Karen Pamela Ruth Vetter, 2006 ABSTRACT Background: No consistent findings have been reported regarding the relationship between aging muscle size and strength. This may be due to the use of an inaccurate method of muscle quantification, anatomical cross-sectional area, and a limited study of muscle group and contraction type. There is little normative data on thigh muscle size and strength, or the nature of relationships among muscle groups of the thigh in a healthy older population. Purpose: 1) To determine the relationship between muscle volume (MV) of the knee flexors, knee extensors, and hip abductors, and their associated muscle strength and fatigue. 2) To investigate the reliability and validity of stereology to determine MV, and to establish the reliability of a protocol to measure hamstring muscle fatigue. 3) To investigate thigh circumference, and determine whether or not it is representative of MV and/or strength. 4) To establish normative strength ratios for this population. Subjects: Healthy older males and females, 51-80 years old. Methods: MV was calculated from MRI's of the subject's legs, using stereology. Isokinetic and isometric strength was measured on the Kin-Corn Dynamometer, and muscle fatigue was measured using EMG during an 80% maximum voluntary contraction (MVC). -

Robotic Biarticulate Muscle Leg Model
Presented at the IEEE Biomedical Circuits and Systems Conference (BIOCAS), 2008, Baltimore, MD. Robotic Biarticulate Muscle Leg Model M. Anthony Lewis and Theresa J. Klein Department of Electrical and Computer Engineering University of Arizona Tucson, USA [email protected] Abstract—The construction of a new robot model of the human lower limb system. The robot features biarticulate muscle-actuators, or actuators that span more than one joint. The transfer of power from proximal to distal segments is demonstrated. The timing between biarticulate muscles and monoarticulate muscles appears critical in maximizing peak power output. I. INTRODUCTION How does the nervous system coordinate the control of the many muscles of the human body? The human body has about 244 kinematic degrees of freedom (DOF) controlled by a minimum of 630 muscles [1]. This large degree of freedom system if complicated by the fact that Figure 1. Model of the human leg. TA is tibialis anterior, SO is soleus, GA is gastrocnemius, VA is Vatus lateralus, RF is rectus femoris, BFS many muscles are biarticulate, that is, they act on more is short head of biceps femoris, HA is two-joint hamstrings, GM is than one joint simultaneously. Biomechanically, these gluteus maximus, and IL is iliacus. Redrawn from [1]. muscles have been ascribed a function of transferring energy from proximal to distal limb lower limb segment knee is extended by the muscles including the rectus and to shock absorbency. Further, the control problem is femoris (RF), itself a biarticulate muscle anchored to the ill-posed an infinite number of muscle activations could hip and knee and the vatus lateralis (VL) acting on the give rise to the same movements. -

Biomechanics Analysis of Human Lower Limb During Walking for Exoskeleton Design
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by Journal of Vibroengineering 2689. Biomechanics analysis of human lower limb during walking for exoskeleton design Jianhua Chen1, Xihui Mu2, Fengpo Du3 1, 2Shijiazhuang Mechanical Engineering College, Shijiazhuang, China 2, 3Shijiazhuang New Technology Application Institute, Shijiazhuang, China 2Corresponding author E-mail: [email protected], [email protected], [email protected] Received 11 April 2017; received in revised form 27 September 2017; accepted 5 October 2017 DOI https://doi.org/10.21595/jve.2017.18459 Abstract. Human body experiences a long natural evolution to have good movement forms and flexible driving mode, during which process, human muscles have already evolved to a sophisticated bio-actuator, usually used in the bionic design of mechanical structures. The article presents a novel idea for the bionics design of artificial limb or exoskeleton robot, considering the motion level and the driving level of human body simultaneously, i.e. the lower limb segment movement and the muscle activity. Firstly, as the support phase, the most complex process during human walking, we divided it into three sub-phases and studied each other’s variations about the angle and torque by the built motion capture system, which is important for ground reaction force control (GRF control). Secondly, the principal muscles around the knee joint were studied by biomechanical simulation, i.e. the vastus medialis muscle and the biceps femoris muscle, after the data of clinical gait by experiment was imported into the human simulation software. The result showed that the vastus medialis muscle, as Hill three elements model, was the principal muscle during knee’s extension motion, which mainly worked during the support phase and could provide a maximum force of 280 N.m. -

Deformation of Human Soft Tissues Experimental and Numerical Aspects
Licentiate Thesis Deformation of human soft tissues Experimental and numerical aspects Sara Kallin Jönköping University School of Engineering Dissertation Series No. 049 • 2019 Licentiate thesis in Machine Design Deformation of human soft tissues – Experimental and numerical aspects Dissertation Series No. 049 © 2019 Sara Kallin Published by School of Engineering, Jönköping University P.O. Box 1026 SE-551 11 Jönköping Tel. +46 36 10 10 00 www.ju.se Printed by BrandFactory AB 2019 ISBN 978-91-87289-52-1 Acknowledgements I would like to express my sincere gratitude to all who have supported me and made this work possible. To my supervisors, Professor Peter Hansbo, Docent Kent Salomonsson and Professor Maria Faresjö for all their support and fruitful discussions during this work. To Dr Asim Rashid for his engagement and collaboration in study I. To all members of the PEOPLE project at Hotswap Norden AB, Ottobock Scandinavia AB and Ossur Nordic HF for their collaboration and support. I would like to express my appreciation to persons involved during tests of the questionnaire, the clinical assessment protocol and the development of equipment. I gratefully thank the volunteering participant in study II, and Hans Eklund, Aleris Röntgen, Jönköping together with Anna Engdahl, Wetterhälsan, Jönköping, for collaboration in data collection. For their financial support, the Jönköping Regional Research Programme, Sweden, the project PEOPLE, the School of Engineering and School of Health and Welfare at Jönköping University are greatly acknowledged. To colleagues and friends at the School of Engineering, School of Health and Welfare and the community of Prosthetics & Orthotics for your support and encouragement, and for making my work more joyful. -

Stresses in Human Leg Muscles in Running and Jumping Determined by Force Plate Analysis and from Published Magnetic Resonance Images
The Journal of Experimental Biology 201, 63–70 (1998) 63 Printed in Great Britain © The Company of Biologists Limited 1998 JEB1084 STRESSES IN HUMAN LEG MUSCLES IN RUNNING AND JUMPING DETERMINED BY FORCE PLATE ANALYSIS AND FROM PUBLISHED MAGNETIC RESONANCE IMAGES SUSANNAH K. S. THORPE1,*, YU LI1, ROBIN H. CROMPTON1 AND R. MCNEILL ALEXANDER2 1Department of Human Anatomy and Cell Biology, Liverpool University, New Medical School, Ashton Street, Liverpool L69 3GE, UK and 2Department of Biology, Leeds University, Leeds LS2 9JT, UK *e-mail: [email protected] Accepted 6 October 1997; published on WWW 9 December 1997 Summary Calculation of the stresses exerted by human muscles to 150 kN m−2 during running at 4 m s−1. In the quadriceps, requires knowledge of their physiological cross-sectional peak stresses ranged from 190 kN m−2 during standing long area (PCSA). Magnetic resonance imaging (MRI) has made jumps to 280 kN m−2 during standing high jumps. Similar it possible to measure PCSAs of leg muscles of healthy stresses were calculated from published measurements of human subjects, which are much larger than the PCSAs of joint moments. These stresses are lower than those cadaveric leg muscles that have been used in previous previously calculated from cadaveric data, but are in the studies. We have used published MRI data, together with range expected from physiological experiments on isolated our own force-plate records and films of running and muscles. jumping humans, to calculate stresses in the major groups of leg muscles. Peak stresses in the triceps surae ranged Key words: muscle stress, magnetic resonance imaging, force-plate from 100 kN m−2 during take off for standing high jumps records, human, muscle, physiological cross-sectional area. -

Leg Function in Humans & Humanoids
Leg Function in Humans & Humanoids Outline Human Gait Humanoid Gait Model Gait Comparison 2 Leg function What is a good model? 3 Leg function in robots Scout II iSprawl EduBot (based on Rhex) Kenken Review: Zhou & Bi (2012) Bioinspir & Biomimetics 4 Human leg function Video: Sten Grimmer 5 Level of Complexity 2012-02-10 | PAK 146, Köln | TU Darmstadt AG Lauflabor | Seyfarth | 6 6 Global Leg Function RLF Radial Leg Function RTF Tangential Leg Function 7 Christian Rode 7 Radial Leg Function in human walking and running speed Radial Leg Force Leg Length Kovac 2010 Force- Length Function Susanne Lipfert 8 Self-stable locomotion? Hip spring Dai Owaki et al. (2008) ICRA RUN Leg spring ) hip k WALK Hip stiffness ( Hip stiffness Leg stiffness (kleg) 9 Passive Dynamic Runner Dai Owaki et al. Dynamic Walking 2009 ) RENNEN hip k Hip stiffness ( Hip stiffness GEHEN Leg stiffness (kleg) 10 Passive Dynamic Runner Dai Owaki et al. 2009 Dynamic Walking 11 Model for stable walking and running Geyer et al. (2006) Proc Roy Soc Lond B 12 Bipedal Spring-Mass Model (BSLIP) Hartmut Geyer WALK RUN GRF = " vertical GRF vertical GRF ground reaction force Geyer et al. (2006) Proc Roy Soc Lond B 13 Spring-Mass Model = spring-loaded inverted pendulum (SLIP) What does this model assume? COM • Forces are pointing to center of mass (COM) • Forces are proportional to leg compression • Fixed foot point (FP) at ground Model validation • Comparison with experimental data FP Trunk Body Segments Leg segments Extensions of the model 3D Locomotion Muscle arrangement Neuromuscular mechanisms Geyer et al.