Ceryle Rudis)
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Breeding Biology of Blue-Eared Kingfisher Alcedo Meninting Sachin Balkrishna Palkar
PALKAR: Blue-eared Kingfisher 85 Breeding biology of Blue-eared Kingfisher Alcedo meninting Sachin Balkrishna Palkar Palkar, S. B., 2016. Breeding biology of Blue-eared Kingfisher Alcedo meninting. Indian BIRDS 11 (4): 85–90. Sachin Balkrishna Palkar, Near D. B. J. College Gymkhana, Sathyabhama Sadan, House No. 100, Mumbai–Goa highway, Chiplun 415605, Ratnagiri District, Maharashtra, India. E-mail: [email protected] Manuscript received on 30 November 2015. Abstract The breeding biology of the Blue-eared Kingfisher Alcedo meninting was studied in Ratnagiri District, Maharashtra, India, between 2012 and 2015. Thirteen clutches of four pairs were studied. Its breeding season extended from June till September. Pairs excavated tunnels ranging in lengths from 18 to 30 cm, with nest entrance diameters varying from 5.3 to 6.0 cm. The same pair probably reuse a nest across years. A typical clutch comprised six eggs. The incubation period was 21 days (20–23 days), while fledgling period was 23 days (20–27 days). Almost 40% of the nests were double-brooded, which ratio probably depends on the strength of the monsoon. Of 75 eggs laid, 66 hatched (88%), of which 60 fledged (90.9%; a remarkable breeding success of 80%. Introduction and not phillipsi. It is also found in the Andaman Islands (A. The Blue-eared KingfisherAlcedo meninting [113, 114] is m. rufiagastra), where it is, apparently, more abundant than morphologically similar to the Common KingfisherA. atthis but the Common Kingfisher, contrary to its status elsewhere in its is neither as common, nor as widely distributed, in India, as the range (Rasmussen & Anderton 2012). -

Spring 2018 Dear Adults Puzzles and Activities
Spring 2018 Spring Across 2. The way water moves through an ecosystem (Water Cycle) Coloring and Games.………...10-11 and Coloring 4. A small narrow river (Stream) Spotlight on Kingfishers…….....8-9 on Spotlight 8. Tall "hot dog" plants (Cattails) 10. Tall wading bird (Great Blue Heron) 6-7 I Spy…………….. I 13. Fish that migrate from the river to ocean and back (Salmon) …………………..…... 14. Insect that can fly backwards (Dragonfly) Food Webs……………………….……4-5 Food 15. Seattle Audubon's logo bird (Cormorant) 16. A small body of fresh water (Pond) Let’s Go Outside................................3 Go Let’s Down 1. Bird with red wing patch on the shoulder (Red Winged Blackbird) Dear Adults……………………..….........2 Dear 3. Two things that tired, hungry migrating birds get from wetlands (Food and Rest) Inside 5. Falling water from the sky (Rain) 6. Duck with green head (Mallard) Seattle Times Photo Contest Photo Times Seattle 7. Flying south for the winter (Migration) Photo credit: Jerry Ackerson, Seattle Audubon – Audubon Seattle Ackerson, Jerry credit: Photo 9. Water in the sky (Clouds) 11. How water turns from liquid to gas (Evaporation) 12. This month's cover bird (Belted Kingfisher) Answers from kingfisher page: 1) True, 2) True, 3) False, some kingfishers don’t eat any fish at all!, 4) True, 5) False, They come in all different colors and sizes! A-4, B-2, C-1, D-3 and not feed them at all! at them feed not and simply enjoy their presence presence their enjoy simply Or better yet, you could also also could you yet, better Or seed, or frozen peas or corn. -
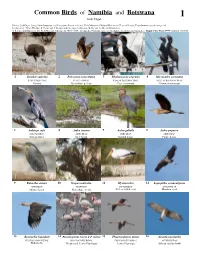
Common Birds of Namibia and Botswana 1 Josh Engel
Common Birds of Namibia and Botswana 1 Josh Engel Photos: Josh Engel, [[email protected]] Integrative Research Center, Field Museum of Natural History and Tropical Birding Tours [www.tropicalbirding.com] Produced by: Tyana Wachter, R. Foster and J. Philipp, with the support of Connie Keller and the Mellon Foundation. © Science and Education, The Field Museum, Chicago, IL 60605 USA. [[email protected]] [fieldguides.fieldmuseum.org/guides] Rapid Color Guide #584 version 1 01/2015 1 Struthio camelus 2 Pelecanus onocrotalus 3 Phalacocorax capensis 4 Microcarbo coronatus STRUTHIONIDAE PELECANIDAE PHALACROCORACIDAE PHALACROCORACIDAE Ostrich Great white pelican Cape cormorant Crowned cormorant 5 Anhinga rufa 6 Ardea cinerea 7 Ardea goliath 8 Ardea pupurea ANIHINGIDAE ARDEIDAE ARDEIDAE ARDEIDAE African darter Grey heron Goliath heron Purple heron 9 Butorides striata 10 Scopus umbretta 11 Mycteria ibis 12 Leptoptilos crumentiferus ARDEIDAE SCOPIDAE CICONIIDAE CICONIIDAE Striated heron Hamerkop (nest) Yellow-billed stork Marabou stork 13 Bostrychia hagedash 14 Phoenicopterus roseus & P. minor 15 Phoenicopterus minor 16 Aviceda cuculoides THRESKIORNITHIDAE PHOENICOPTERIDAE PHOENICOPTERIDAE ACCIPITRIDAE Hadada ibis Greater and Lesser Flamingos Lesser Flamingo African cuckoo hawk Common Birds of Namibia and Botswana 2 Josh Engel Photos: Josh Engel, [[email protected]] Integrative Research Center, Field Museum of Natural History and Tropical Birding Tours [www.tropicalbirding.com] Produced by: Tyana Wachter, R. Foster and J. Philipp, -

Bird Species I Have Seen World List
bird species I have seen U.K tally: 279 US tally: 393 Total world: 1,496 world list 1. Abyssinian ground hornbill 2. Abyssinian longclaw 3. Abyssinian white-eye 4. Acorn woodpecker 5. African black-headed oriole 6. African drongo 7. African fish-eagle 8. African harrier-hawk 9. African hawk-eagle 10. African mourning dove 11. African palm swift 12. African paradise flycatcher 13. African paradise monarch 14. African pied wagtail 15. African rook 16. African white-backed vulture 17. Agami heron 18. Alexandrine parakeet 19. Amazon kingfisher 20. American avocet 21. American bittern 22. American black duck 23. American cliff swallow 24. American coot 25. American crow 26. American dipper 27. American flamingo 28. American golden plover 29. American goldfinch 30. American kestrel 31. American mag 32. American oystercatcher 33. American pipit 34. American pygmy kingfisher 35. American redstart 36. American robin 37. American swallow-tailed kite 38. American tree sparrow 39. American white pelican 40. American wigeon 41. Ancient murrelet 42. Andean avocet 43. Andean condor 44. Andean flamingo 45. Andean gull 46. Andean negrito 47. Andean swift 48. Anhinga 49. Antillean crested hummingbird 50. Antillean euphonia 51. Antillean mango 52. Antillean nighthawk 53. Antillean palm-swift 54. Aplomado falcon 55. Arabian bustard 56. Arcadian flycatcher 57. Arctic redpoll 58. Arctic skua 59. Arctic tern 60. Armenian gull 61. Arrow-headed warbler 62. Ash-throated flycatcher 63. Ashy-headed goose 64. Ashy-headed laughing thrush (endemic) 65. Asian black bulbul 66. Asian openbill 67. Asian palm-swift 68. Asian paradise flycatcher 69. Asian woolly-necked stork 70. -

BEHAVIOUR of NEW ZEALAND KINGFISHERS FEEDING CHICKS by LYNLEY MARIE HAYES
BEHAVIOUR OF NEW ZEALAND KINGFISHERS FEEDING CHICKS By LYNLEY MARIE HAYES ABSTRACT Behaviour of Kingfishers (Halcyon sancta vagans) was studied at three nests in Canterbury. Courtship feeding was observed. Chicks were fed by both parents, predominantly on lizards, crabs and insects. No difference was found in the proportion of prey sizes fed to chicks of different ages (~2=0.02, p>0.05). Chicks were fed about every 20 min in the first week, the rate increasing to every 10 min in the latter stages of nesting. Kingfishers were aggressive during nesting and attacked a wide variety of species as well as other Kingfishers. Mortality during nesting of adult Kingfishers was heavy in suburban habitats. INTRODUCTION Relatively little information is available on the breeding biology of New Zealand Kingfishers (Halcyon sancta vagans). During my studies of Kingfisher feeding behaviour, I found several nests and observed Kingfishers feeding their young. Kingfisher chicks fledge about 24 days after hatching. Juvenile plumage is similar to that of adults except that the breast feathers have a dark edging, giving the chest a mottled look, and the upper wing-coverts are tipped with cream. Chicks remain with their parents for several weeks after leaving the nest and then disperse to winter habitats (Stead 1932). Information about the diet of nestlings is largely restricted to analyses of food pellets and droppings, which have shown that Kingfisher chicks are fed a wide variety of invertebrates and some vertebrates (O'Donnell 1981, Fitzgerald et al. 1986). In a direct observation of Kingfisher chicks being fed by their parents, Guthrie-Smith (1927) found that chicks were fed mainly lizards and dragonflies and occasionally cicadas and locusts. -

RCP Have Been Created, Except Two 'Phase In'
CORACIIFORMES TAG REGIONAL COLLECTION PLAN Third Edition, December 31, 2008 White-throated Bee-eaters D. Shapiro, copyright Wildlife Conservation Society Prepared by the Coraciiformes Taxon Advisory Group Edited by Christine Sheppard TAG website address: http://www.coraciiformestag.com/ Table of Contents Page Coraciiformes TAG steering committee 3 TAG Advisors 4 Coraciiformes TAG definition and taxonomy 7 Species in the order Coraciiformes 8 Coraciiformes TAG Mission Statement and goals 13 Space issues 14 North American and Global ISIS population data for species in the Coraciiformes 15 Criteria Used in Evaluation of Taxa 20 Program definitions 21 Decision Tree 22 Decision tree diagrammed 24 Program designation assessment details for Coraciiformes taxa 25 Coraciiformes TAG programs and program status 27 Coraciiformes TAG programs, program functions and PMC advisors 28 Program narratives 29 References 36 CORACIIFORMES TAG STEERING COMMITTEE The Coraciiformes TAG has nine members, elected for staggered three year terms (excepting the chair). Chair: Christine Sheppard Curator, Ornithology, Wildlife Conservation Society/Bronx Zoo 2300 Southern Blvd. Bronx, NY 10460 Phone: 718 220-6882 Fax 718 733 7300 email: [email protected] Vice Chair: Lee Schoen, studbookkeeper Great and Rhino Hornbills Curator of Birds Audubon Zoo PO Box 4327 New Orleans, LA 70118 Phone: 504 861 5124 Fax: 504 866 0819 email: [email protected] Secretary: (non-voting) Kevin Graham , PMP coordinator, Blue-crowned Motmot Department of Ornithology Disney's Animal Kingdom PO Box 10000 Lake Buena Vista, FL 32830 Phone: (407) 938-2501 Fax: 407 939 6240 email: [email protected] John Azua Curator, Ornithology, Denver Zoological Gardens 2300 Steele St. -

BIRD FORAGING and ITS ECONOMIC EFFECT in the PADDY FIELDS of BANGALORE (INDIA) Shakunthala Sridhara University of Agricultural Sciences
University of Nebraska - Lincoln DigitalCommons@University of Nebraska - Lincoln Bird Control Seminars Proceedings Wildlife Damage Management, Internet Center for 10-1983 BIRD FORAGING AND ITS ECONOMIC EFFECT IN THE PADDY FIELDS OF BANGALORE (INDIA) Shakunthala Sridhara University of Agricultural Sciences M.V.V. Subramanyam University of Agricultural Sciences R. V. Krishnamoorthy University of Agricultural Sciences Follow this and additional works at: http://digitalcommons.unl.edu/icwdmbirdcontrol Sridhara, Shakunthala; Subramanyam, M.V.V.; and Krishnamoorthy, R. V., "BIRD FORAGING AND ITS ECONOMIC EFFECT IN THE PADDY FIELDS OF BANGALORE (INDIA)" (1983). Bird Control Seminars Proceedings. 246. http://digitalcommons.unl.edu/icwdmbirdcontrol/246 This Article is brought to you for free and open access by the Wildlife Damage Management, Internet Center for at DigitalCommons@University of Nebraska - Lincoln. It has been accepted for inclusion in Bird Control Seminars Proceedings by an authorized administrator of DigitalCommons@University of Nebraska - Lincoln. 151 BIRD FORAGING AND ITS ECONOMIC EFFECT IN THE PADDY FIELDS OF BANGALORE (INDIA) Shakunthala Sridhara, M.V.V. Subramanyam and R.V. Krishnamoorthy Departments of Vertebrate Biology and Zoology University of Agricultural Sciences Bangalore, India INTRODUCTION Birds are often serious pests of rice. The small size of this cereal at all stages of its ripening makes it attractive for the small, seed-eating birds. Considerable damage also is inflicted during early stages of growth when germinating seedlings are depredated by grainivores, and several species of aquatic birds trample the fields in search of food. The migratory blackbirds (Age/aius species and others) eat various grains across the U.S.A. and Mexico, while huge numbers of red-billed weaver bird (Que/ea que/ea) account for grain losses up to 20% in several rice-growing African countries (Efferson, 1952). -

Predatory Efficiency and Energetics of Belted Kingfishers
PREDATORY EFFICIENCY AND ENERGETICS OF BELTED KINGFISHERS WINTERING ALONG THE MAD RIVER by Douglas J. Forsell A Thesis Presented to The Faculty of Humboldt State University In Partial Fulfillment of the Requirements for the Degree Master of Science June, 1983 PREDATORY EFFICIENCY AND ENERGETICS OF BELTED KINGFISHERS WINTERING ALONG THE MAD RIVER by Douglas J. Forsell Approved by the Master's Thesis Committee James R. Koplin, Chairman David W. Kitchen Teri y Roelofs Natural Resources Graduate Program Approved by the Dean of Graduate Studies Alba M. Gillespie ABSTRACT Belted Kingfishers (Ceryle alcyon) were studied for two winters along the lower fad River, Humboldt County, California. Kingfishers spent 79.6 percent of daylight hours hunting, 12.2 percent inactively perched, 4.0 percent on intraspecific interactions, 2.3 percent handling prey, 1.6 percent preening and bathing, 0.18 percent in interspecific interactions, and 0.1 percent flying in response to human disturbances. Kingfishers spent 11 percent more time hunting during the winter of 1975-76 than during the less severe winter of 1976-77. Fish comprised 91 percent of the prey identified; salmonids (Salmonidae), sculpins (Cottidae), and sticklebacks (Gasterosteidae) were the three major types of fish taken. Time spent subduing fish and the number of beats delivered to fish were positively correlated with length of fish. More time and a greater number of beats were needed to subdue sticklebacks and sculpins than salmonids of the same size class, possibly because more effort was required to disable the protective spines of sticklebacks and sculpins. Over 50 percent of strikes from perches resulted in captures of prey, while only 20 percent of strikes from a hovering position were successful. -

Effects of Mercury on Condition and Coloration of Belted Kingfishers
W&M ScholarWorks Dissertations, Theses, and Masters Projects Theses, Dissertations, & Master Projects 2007 Effects of Mercury on Condition and Coloration of Belted Kingfishers Ariel Elizabeth White College of William & Mary - Arts & Sciences Follow this and additional works at: https://scholarworks.wm.edu/etd Part of the Biodiversity Commons, Environmental Health and Protection Commons, and the Natural Resources and Conservation Commons Recommended Citation White, Ariel Elizabeth, "Effects of Mercury on Condition and Coloration of Belted Kingfishers" (2007). Dissertations, Theses, and Masters Projects. Paper 1539626860. https://dx.doi.org/doi:10.21220/s2-0956-qp64 This Thesis is brought to you for free and open access by the Theses, Dissertations, & Master Projects at W&M ScholarWorks. It has been accepted for inclusion in Dissertations, Theses, and Masters Projects by an authorized administrator of W&M ScholarWorks. For more information, please contact [email protected]. EFFECTS OF MERCURY ON CONDITION AND COLORATION OF BELTED KINGFISHERS A Thesis Presented to The Faculty of the Department of Biology The College of William &, Mary in Virginia In Partial Fulfillment Of the Requirements for the Degree of Masters of Science by Ariel Elizabeth White 2007 APPROVAL SHEET This thesis is submitted in partial fulfillment of the requirements for the degree of Masters of Science ______________ CyuJjlj) ______________ Ariel White Approved, February 2007 Dan Crlstol Thesis Advisor Randy Chambers George/Gilchrist TABLE OF CONTENTS Acknowledgments viii List of Tables x List of Figures xii Abstract xiii 1 EFFECTS OF MERCURY ON THE REPRODUCTIVE SUCCESS OF BELTED KINGFISHERS (CERYLE ALCYON) 2 INTRODUCTION ....................... 2 Mercury as a Global Pollutant . 2 History of the Study Site . -

(Megaceryle Torquata Stictipennis) in Basse-Terre, Guadeloupe
bioRxiv preprint doi: https://doi.org/10.1101/2020.04.15.038729; this version posted May 7, 2020. The copyright holder for this preprint (which was not certified by peer review) is the author/funder, who has granted bioRxiv a license to display the preprint in perpetuity. It is made available under aCC-BY-NC 4.0 International license. 2 Habitat Selection by the Ringed Kingfisher (Megaceryle torquata 4 stictipennis) in Basse-Terre, Guadeloupe: Possible Negative Association with Chlordecone Pollution 6 1 2 1 1 8 Pascal Villard , Alain Ferchal , Philippe Feldmann , Claudie Pavis and Christophe Bonenfant3 10 12 1AEVA (the society for the study and protection of vertebrates and plants in the Lesser Antilles), Hauteurs Lézarde, 97170 Petit-Bourg, Guadeloupe; P.V. e-mail: [email protected], P.F. e-mail: 14 [email protected], C.P. e-mail: [email protected]; 2Parc National de la Guadeloupe, Montéran 97120 St Claude, Guadeloupe; e-mail: [email protected]; 3UMR 16 CNRS 5558, Laboratoire Biométrie et Biologie Évolutive, Université Claude Bernard - Lyon 1, 43 Boulevard du 11 Novembre 1918, 69622 Villeurbanne Cedex, France; e-mail: 18 [email protected] 20 Header: The Ringed Kingfisher in Guadeloupe 1 bioRxiv preprint doi: https://doi.org/10.1101/2020.04.15.038729; this version posted May 7, 2020. The copyright holder for this preprint (which was not certified by peer review) is the author/funder, who has granted bioRxiv a license to display the preprint in perpetuity. It is made available under aCC-BY-NC 4.0 International license. -

Nile Perch Was Responsible for the Decline of Haplochromines in Lake Victoria
Canadian Journal of Fisheries and Aquatic Sciences Guilty as charged: Nile perch was responsible for the decline of haplochromines in Lake Victoria Journal: Canadian Journal of Fisheries and Aquatic Sciences Manuscript ID cjfas-2017-0056.R2 Manuscript Type: Discussion Date Submitted by the Author: 06-Nov-2017 Complete List of Authors: Marshall, Brian; University of Zimbabwe (Retired), Biological sciences Is the invited manuscript for consideration in a Special N/A Draft Issue? : Lake Victoria, haplochromines, Nile perch, EUTROPHICATION < General, Keyword: CLIMATE CHANGE < General https://mc06.manuscriptcentral.com/cjfas-pubs Page 1 of 76 Canadian Journal of Fisheries and Aquatic Sciences 1 GUILTY AS CHARGED: NILE PERCH WAS THE CAUSE OF THE HAPLOCHROMINE DECLINE IN LAKE VICTORIA BRIAN E. MARSHALL Department of Biological sciences, University of Zimbabwe, Harare and Lake Victoria Fisheries Organization, Jinja, Uganda1 1Present address: 9/4074 Great North Road, Auckland 0602, New Zealand. E-mail: brian.marshall01@ gmail.com Telephone: +64 98184790 Fax: none No. of words: 17321 Draft No. of figures: 8 No. of tables: 11 https://mc06.manuscriptcentral.com/cjfas-pubs Canadian Journal of Fisheries and Aquatic Sciences Page 2 of 76 2 1 GUILTY AS CHARGED: NILE PERCH WAS RESPONSIBLE FOR THE DECLINE 2 OF HAPLOCHROMINES IN LAKE VICTORIA 3 4 Abstract 5 Debate on the contribution of Nile perch (Lates niloticus) to the demise of Lake 6 Victoria’s 500+ endemic haplochromine cichlids centres around the “top-down” and 7 “bottomup” hypotheses. The former suggests Nile perch destroyed the haplochromines 8 causing the disruption of food chains and nutrient cycling so initiating the accelerated 9 eutrophication of the lake. -
Africa's Kingfishers
1 2 Africa’s Kingfishers 3 4 A GUIDE TO THEIR IDENTIFICATION 5 6 There are 87 species of kingfishers in the world, ranging in size from the large kookaburras of 7 Australia, weighing nearly half a kilogram, to the miniscule African Dwarf Kingfisher, which weighs only 8 9–12 grams. Sixteen of the 87 species occur in Africa. Of these 16, all except Pied, Grey-hooded 9 and River kingfishers are confined to the continent. Eastern Asia and Australasia are the kingfisher 10 Meccas of the world, having respectively 25 and 31 species. 11 Most kingfishers are brightly coloured and some have unusual adaptations for display or feeding. The 12 paradise kingfishers of New Guinea and north-eastern Australia have spectacularly elongated central tail feathers, and the 13 Shovel-billed Kingfisher Clytoceyx rex, also of New Guinea, has an extraordinary bill, resembling that 14 of a giant finch, which it uses to dig grubs from the soil. 15 In this article, Phil Hockey of the Percy FitzPatrick Institute of African Ornithology outlines some of the key 16 identification features of Africa’s kingfishers, concentrating on those species-pairs and groups that 17 sometimes cause problems in the field. 18 AFRICAN DWARF AND PYGMY KINGFISHERS WHITE-BELLIED AND CHOCOLATE-BACKED KINGFISHERS 19 20 White-bellied Kingfisher African Dwarf Kingfisher Alcedo leucogaster nais 21 Ceyx lecontei (Principe Island) 22 10 cm 23 White-bellied Kingfisher Alcedo leucogaster leucogaster 24 (Nigeria to Angola) 25 13 cm 26 adult 27 28 29 30 adult 31 32 These are the smallest king- rainforests, where it hunts 33 fishers in Africa.