DISSERTATION O Attribution
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Trouble Flares up at Mabieskraal
, 8 .~ · le bv si b k ' d" I£tl1l1l1ll1l1l1l1ll1l"""III1I1I11I11I11 I1 " II " II I1I1 I11 I1 " ~l l11 l1 m lll IIIIII III Bantustan IS rue Y slam 0 In Isgulse ... 1• ••• •• ••• 1 Congress reiects the concept of national homes § for Africans ...We claim the whole of South Africa as our home Vol. 5, No, 51 Registered. at the G.P.O. as a Newspaper 6di= _ SOUTHERNEDITION Thursday, October 8, 1959 • 5 ~1I"1II"III11I1I11I11I1I11I11I1 I1I11" nllllll lllllll lll ll ll ll ll ll ll ll lll l lll lll lll lll ll ll ll lll lll lll ll lllll ll ll ll ll lll ll l1 1I 111 11111 11 ~ oWHAT KH USCHOV TOLD THE U.S.A. The verbatim record no other news Slap In The Face For E~ic Louw paper in South Africa has printed JOHANNESBURG as their home", Iin South Africa during the last two B~~~~~ aF~:~naft~i~1~~~ whT: ~[r~~e s~b~ftt~J~~~f~:~~~ ye~~~l i n g ~ith so-called Ban.tusta!1s ~r. Eric Louw had mad.e ,bis ~:~~ r:, i ~ s ~~o ~i v~f t~~e A9ri~~~a~i~~: ~o~~r~~~~~l s ~:dt e~~ ~ h~ f ~h~ o~~~I~ ~ .- Pages 4 and 5 big speech to U.N: D., claiming point on trends and developments Continued 011 page 7 that the Bantu territories would 1 -------------------- I(!1:~~~~~~~~~~~~~~~~~~ eventually form part of a South African Commonwealth toge ther with White South Africa, the African National Congress has sent a memorandum to ~;:t~' :he:~ri~i::tu~~~n ~~~~:; as a gigantic fraud. -

Truth and Reconciliation Commission of South Africa Report: Volume 2
VOLUME TWO Truth and Reconciliation Commission of South Africa Report The report of the Truth and Reconciliation Commission was presented to President Nelson Mandela on 29 October 1998. Archbishop Desmond Tutu Ms Hlengiwe Mkhize Chairperson Dr Alex Boraine Mr Dumisa Ntsebeza Vice-Chairperson Ms Mary Burton Dr Wendy Orr Revd Bongani Finca Adv Denzil Potgieter Ms Sisi Khampepe Dr Fazel Randera Mr Richard Lyster Ms Yasmin Sooka Mr Wynand Malan* Ms Glenda Wildschut Dr Khoza Mgojo * Subject to minority position. See volume 5. Chief Executive Officer: Dr Biki Minyuku I CONTENTS Chapter 1 Chapter 6 National Overview .......................................... 1 Special Investigation The Death of President Samora Machel ................................................ 488 Chapter 2 The State outside Special Investigation South Africa (1960-1990).......................... 42 Helderberg Crash ........................................... 497 Special Investigation Chemical and Biological Warfare........ 504 Chapter 3 The State inside South Africa (1960-1990).......................... 165 Special Investigation Appendix: State Security Forces: Directory Secret State Funding................................... 518 of Organisations and Structures........................ 313 Special Investigation Exhumations....................................................... 537 Chapter 4 The Liberation Movements from 1960 to 1990 ..................................................... 325 Special Investigation Appendix: Organisational structures and The Mandela United -

The Referendum in FW De Klerk's War of Manoeuvre
The referendum in F.W. de Klerk’s war of manoeuvre: An historical institutionalist account of the 1992 referendum. Gary Sussman. London School of Economics and Political Science. Thesis submitted for the degree of Doctor of Philosophy in Government and International History, 2003 UMI Number: U615725 All rights reserved INFORMATION TO ALL USERS The quality of this reproduction is dependent upon the quality of the copy submitted. In the unlikely event that the author did not send a complete manuscript and there are missing pages, these will be noted. Also, if material had to be removed, a note will indicate the deletion. Dissertation Publishing UMI U615725 Published by ProQuest LLC 2014. Copyright in the Dissertation held by the Author. Microform Edition © ProQuest LLC. All rights reserved. This work is protected against unauthorized copying under Title 17, United States Code. ProQuest LLC 789 East Eisenhower Parkway P.O. Box 1346 Ann Arbor, Ml 48106-1346 T h e s e s . F 35 SS . Library British Library of Political and Economic Science Abstract: This study presents an original effort to explain referendum use through political science institutionalism and contributes to both the comparative referendum and institutionalist literatures, and to the political history of South Africa. Its source materials are numerous archival collections, newspapers and over 40 personal interviews. This study addresses two questions relating to F.W. de Klerk's use of the referendum mechanism in 1992. The first is why he used the mechanism, highlighting its role in the context of the early stages of his quest for a managed transition. -
Ben Schoeman Freeway
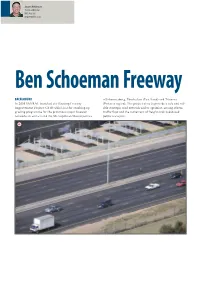
Jurgens Weidemann Technical Director BKS (Pty) Ltd [email protected] Ben Schoeman Freeway BACKGROUND of Johannesburg, Ekurhuleni (East Rand) and Tshwane In 2008 SANRAL launched the Gauteng Freeway (Pretoria region). The project aims to provide a safe and reli- Improvement Project (GFIP) which is a far-reaching up- able strategic road network and to optimise, among others, grading programme for the province’s major freeway traffic flow and the movement of freight and road-based networks in and around the Metropolitan Municipalities public transport. 1 The GFIP is being implemented in phases. The first phase 1 Widened to five lanes per carriageway comprises the improvement of approximately 180 km of 2 Bridge widening at the Jukskei River existing freeways and includes 16 contractual packages. The 3 Placing beams at Le Roux overpass network improvement comprises the adding of lanes and up- 4 Brakfontein interchange – adding a third lane grading of interchanges. Th e upgrading of the Ben Schoeman Freeway (Work Package 2 C of the GFIP) is described in this article. AIMS AND OBJECTIVES Th e upgraded and expanded freeways will signifi cantly re- duce traffi c congestion and unblock access to economic op- portunities and social development projects. Th e GFIP will provide an interconnected freeway system between the City of Johannesburg and the City of Tshwane, this system currently being one of the main arteries within the north-south corridor. One of the most significant aims of this investment for ordinary citizens is the reduction of travel times since many productive hours are wasted as a result of long travel times. -
Final E-Toll and GFIP Report+V20
The socio-economic impact of the Gauteng Freeway Improvement Project and E-tolls Report Report of the Advisory Panel appointed by Gauteng Premier, Mr David Makhura 30 November 2014 GAUTENG PROVINCIAL GOVERNMENT REPUBLIC OF SOUTH AFRICA Socio-economic Impact Gauteng Freeway Improvement Project and E-tolls Table of contents Part One: Preamble, Preface and Executive Summary Preamble ...................................................................................................................................................... i Preface ........................................................................................................................................................ iii Acknowledgements .................................................................................................................................... vi Members of the Advisory Panel ................................................................................................................ vii Executive summary .................................................................................................................................... 1 1. Introduction ................................................................................................................................... 1 2. Background to the recommendations of the Panel ...................................................................... 3 3. Recommendations ........................................................................................................................ -

The Road to Excess: a Paper on High Pricing, Collusion and Capture of National Road Construction
POSITION PAPER The Road to Excess: A Paper on High Pricing, Collusion and Capture of National Road Construction A revision and update of OUTA’s previous position paper (Titled: GFIP Construction Costs and Sanral’s Odious Debt - Feb 2016) on the inflated cost of road construction in South Africa, more specifically on projects managed by the South African National Roads Agency Limited (SANRAL) POSITION PAPER – 6 FEBRUARY 2017 Table of Contents Executive Summary .......................................................................................................... 4 1. Introduction ............................................................................................................. 7 1.1 SANRAL’s response to OUTA’s initial GFIP costs position paper ..................... 10 1.2 Further investigation leading to OUTA’s revised position ............................... 11 1.3 Overarching Claims ........................................................................................... 12 2. Background to the paper ....................................................................................... 13 2.1 Construction Industry Collusion ........................................................................... 15 2.2 Gauteng Freeway Improvement Project (GFIP): Addressing growing urban congestion in the province of Gauteng, South Africa. ................................................ 15 2.3 OUTA’s methodology and work conducted to support the opinion that the GFIP was significantly overpriced. ..................................................................................... -

36927 18-10 Roadcarrierp P1 Layout 1
Government Gazette Staatskoerant REPUBLIC OF SOUTH AFRICA REPUBLIEK VAN SUID-AFRIKA October Vol. 580 Pretoria, 18 2013 Oktober No. 36927 PART 1 OF 4 N.B. The Government Printing Works will not be held responsible for the quality of “Hard Copies” or “Electronic Files” submitted for publication purposes AIDS HELPLINE: 0800-0123-22 Prevention is the cure 305096—A 36927—1 2 No. 36927 GOVERNMENT GAZETTE, 18 OCTOBER 2013 IMPORTANT NOTICE The Government Printing Works will not be held responsible for faxed documents not received due to errors on the fax machine or faxes received which are unclear or incomplete. Please be advised that an “OK” slip, received from a fax machine, will not be accepted as proof that documents were received by the GPW for printing. If documents are faxed to the GPW it will be the sender’s respon- sibility to phone and confirm that the documents were received in good order. Furthermore the Government Printing Works will also not be held responsible for cancellations and amendments which have not been done on original documents received from clients. CONTENTS INHOUD Page Gazette Bladsy Koerant No. No. No. No. No. No. Transport, Department of Vervoer, Departement van Cross Border Road Transport Agency: Oorgrenspadvervoeragentskap aansoek- Applications for permits:.......................... permitte: .................................................. Menlyn..................................................... 3 36927 Menlyn..................................................... 3 36927 Applications concerning Operating Aansoeke -

Directions to TIPS - 227 Lange Street, Nieuw Muckleneuk 0181, Pretoria, South Africa Contact No: 012 433 9340
Directions to TIPS - 227 Lange Street, Nieuw Muckleneuk 0181, Pretoria, South Africa Contact no: 012 433 9340 From Johannesburg/Sandton via N1 Head north on the N1 toward Pretoria/Polokwane/N4/Witbank Take exit 124 to merge onto N1 toward Pretoria East/Polokwane Continue onto N14 Ben Schoeman Freeway Take exit 335 for M7/Eeufees Road toward Pretoria Turn right onto Eeufees Road/M7 Take the ramp onto Christina De Wit Avenue/M18 Slight right to stay on Christina De Wit Avenue/M18 Continue to follow M18 Continue onto George Storrar Drive Turn right onto Florence Ribeiro Drive (formerly Queen Wilhelmina Avenue) Take the 2nd left onto Lange Street TIPS will be on the right From Johannesburg/Sandton via M1 Head north on M1 towards N1/Pretoria Continue onto N1 Continue onto N14 Ben Schoeman Freeway Take exit 335 for M7/Eeufees Road toward Pretoria Turn right onto Eeufees Road/M7 Take the ramp onto Christina De Wit Avenue/M18 Slight right to stay on Christina De Wit Avenue/M18 Continue to follow M18 Continue onto George Storrar Drive Turn right onto Florence Ribeiro Drive (formerly Queen Wilhelmina Avenue) Take the 2nd left onto Lange Street TIPS will be on the right From O.R. Tambo International Airport Head southwest on O.R. Tambo Airport Road Turn left toward Exit 46 Take exit 46 for R21 North toward Kempton Park/Pretoria Merge onto R21 Keep right at the fork Turn right onto George Storrar Drive Turn right onto Florence Ribeiro Drive (formerly Queen Wilhelmina Avenue) Take the 2nd left onto Lange Street TIPS will be on the right From Pretoria -

Fascist Or Opportunist?”: the Political Career of Oswald Pirow, 1915–1943
Historia, 63, 2, November 2018, pp 93-111 “Fascist or opportunist?”: The political career of Oswald Pirow, 1915–1943 F.A. Mouton* Abstract Oswald Pirow’s established place in South African historiography is that of a confirmed fascist, but in reality he was an opportunist. Raw ambition was the underlying motive for every political action he took and he had a ruthless ability to adjust his sails to prevailing political winds. He hitched his ambitions to the political momentum of influential persons such as Tielman Roos and J.B.M. Hertzog in the National Party with flattery and avowals of unquestioning loyalty. As a Roos acolyte he was an uncompromising republican, while as a Hertzog loyalist he rejected republicanism and national-socialism, and was a friend of the Jewish community. After September 1939 with the collapse of the Hertzog government and with Nazi Germany seemingly winning the Second World War, overnight he became a radical republican, a national-socialist and an anti-Semite. The essence of his political belief was not national-socialism, but winning, and the opportunistic advancement of his career. Pirow’s founding of the national-socialist movement, the New Order in 1940 was a gamble that “went for broke” on a German victory. Keywords: Oswald Pirow; New Order; fascism; Nazi Germany; opportunism; Tielman Roos; J.B.M. Hertzog; ambition; Second World War. Opsomming In die Suid-Afrikaanse historiografie word Oswald Pirow getipeer as ’n oortuigde fascis, maar in werklikheid was hy ’n opportunis. Rou ambisie was die onderliggende motivering van alle politieke handelinge deur hom. Hy het die onverbiddelike vermoë gehad om sy seile na heersende politieke winde te span. -

Die Burger Se Rol in Die Suid-Afrikaanse Partypolitiek, 1934 - 1948
DIE BURGER SE ROL IN DIE SUID-AFRIKAANSE PARTYPOLITIEK, 1934 - 1948 deur JURIE JACOBUS JOUBERT voorgelê luidens die vereistes vir die graad D. LITT ET PHIL in die vak GESKIEDENIS aan die UNIVERSITEIT VAN SUID-AFRIKA PROMOTOR: PROFESSOR C.F.J. MULLER MEDE-PROMOTOR: PROFESSOR J.P. BRITS JUNIE 1990 THE PRESENCE GF DIE BURGER IN THE PARTYPOLITICS DF SOUTH AFRICA, 1934 - 1948 by JURIE JACOBUS JOUBERT Submitted in accordance with the requirements for the degree of DOCTOR OF LITERATURE AND PHILOSOPHY in the subject HISTORY at the UNIVERSITY OF SOUTH AFRICA PROMOTER : PROFESSOR C.F.J. MULLER JOINT PROMOTER : PROFESSOR J.P. BRITS JUNE 1990 U N f S A BIBLIOTPPK AS9U .1 a Class KÍas ..J & t e Access I Aanwin _ 01326696 "Ek verklaar hiermee dat Die Burger se rol in die Suid-Afrikaanse Partypolitiek, 1934 - 1948 my eie werk is en dat ek alle bronne wat ek gebruik of aangehaal het deur middel van volledige verwyeyigs aangecfyi en erken het" lU t (i) SUMMARY During the nineteen thirties and forties the Afrikaans newspaper Die Burger occupied a prominent place within the ambience of the South African press. Without reaching large circulation figures, it achieved recognition and respect because - apart from other reasons - it commanded the skills of a very competent editorial staff and management team. The way in which it effectively ousted its main rival Die Suiderstem, is testimony of its power and influence, particularly in its hinterland. The close association between Die Burger and the Cape National Party represented a formidable joining of forces. This relation ship, entailing mutual advantages, was sustained significantly by the involvement of Dr. -

Transportation Engineering � Ben Schoeman Freeway � Nanotechnology in Pavement Engineering � Gautrain Commences Operations on Airport Link
Icivili Enjiniyering SeptemberSSteptem be 2010 Vol 18 No 8 W I N N E R 2 0 0 9 FOR EXCELLENCE IN MAGAZINE PUBLISHING AND EDITORIAL TTransportationransportation EEngineeringngineering BBenen SchoemanSchoeman FFreewayreeway NNanotechnologyanotechnology iinn ppavementavement eengineeringngineering GGautrainautrain ccommencesommences ooperationsperations oonn aairportirport llinkink EECSACSA nnoteote oonn rrolesoles aandnd rresponsibilitiesesponsibilities iinn tthehe pprofessionrofession Icivili Enjiniyering September 2010 Vol 18 No 8 W I N N E R 2 0 0 9 FOR EXCELLENCE IN MAGAZINE PUBLISHING AND EDITORIAL CCOVEROVER AARTICLERTICLE Transportation Engineering Ben Schoeman Freeway Nanotechnology in pavement engineering Gautrain commences operations on airport link ECSA note on roles and responsibilities in the profession IsiNdebele ON THE COVER Technology that had previously been used for cold foaming of bitumen was adapted for successful use in an ordinary continuous drum mix asphalt ON THE COVER plant for the manufacturing of Warm Mix Asphalt by National Asphalt. The Using a conventional drum plant to produce Warm Mix Asphalt plant seen on the cover is situated at National’s Cliffdale operation near National – turning the cold foam process into warm asphalt 2 Shongweni in KwaZulu-Natal OPINION BOOK REVIEWS The Motorist’s Paradise 74 Innovation – changing the tools of the trade 6 A guide to South Africa’s mountain passes and poorts 75 TRANSPORTATION ENGINEERING Ben Schoeman Freeway 8 MARKET PERSPECTIVE Infrastructure construction spend -

Ben Schoeman.Indd
TP2039091 (1811-1886) BEN BEN SCHOEMAN SCHOEMAN FRANZ LISZT Après une Lecture du Dante: 19:04 1 Vallée d’Obermann Fantasia quasi Sonata (Années de Pèlerinage, Second year, Italy, S.161) 15:18 Les jeux d’eaux à la Villa d’Este 2 (Années de Pèlerinage, Endler Hall, First year, Switzerland, S.160) South Africa 9:23 Sonata in B minor, S.178 3 LISZT Recorded at: (Années de Pèlerinage,: 77:05 Third year, S.163) Total Luis Magalhães 33:18 on DecemberBen Schoeman18 - 21, 2010 (piano)Gerhard Roux 4 Stellenbosch University Artists: Gerhard Roux Produced by: W. Heuer Musikhaus Tim Lengfeld Balance engineer: Glitz-design Studio 1B Piano tuner: Justin Versfeld, Leon van Zyl Edited and Mixed Masteredby: by: Graphic Design:Photography: 2011 Standard Bank Young Artist for Music Assistants: Bösendorfer 280 concert piano BBenen SSchoeman.inddchoeman.indd SpreadSpread 1 ofof 6 - PPages(12,ages(12, 1)1) 111/03/281/03/28 12:2912:29 Switzerland, Bulgaria, the Czech Republic and the United Kingdom. Born into a musical family, Ben Schoeman studied the piano from a young age under the guidance of Joseph LISZT Stanford in Pretoria. After winning all the national music competitions in South Africa he moved to Italy, where he studied with Michel Dalberto, Louis Lortie and Boris Petrushansky at the Accademia His performance Pianistica ‘Incontri col Maestro’ in Imola. of Brahms’ Second There he obtained a Master Concert Piano Concerto with Diploma together with a MMus Degree the Cape Philharmonic in Performing Arts (cum laude) from the Orchestra was described as University of Pretoria.