AI-FML Agent for Robotic Game of Go and Aiot Real-World Co-Learning Applications
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Residual Networks for Computer Go
IEEE TCIAIG 1 Residual Networks for Computer Go Tristan Cazenave Universite´ Paris-Dauphine, PSL Research University, CNRS, LAMSADE, 75016 PARIS, FRANCE Deep Learning for the game of Go recently had a tremendous success with the victory of AlphaGo against Lee Sedol in March 2016. We propose to use residual networks so as to improve the training of a policy network for computer Go. Training is faster than with usual convolutional networks and residual networks achieve high accuracy on our test set and a 4 dan level. Index Terms—Deep Learning, Computer Go, Residual Networks. I. INTRODUCTION Input EEP Learning for the game of Go with convolutional D neural networks has been addressed by Clark and Storkey [1]. It has been further improved by using larger networks [2]. Learning multiple moves in a row instead of only one Convolution move has also been shown to improve the playing strength of Go playing programs that choose moves according to a deep neural network [3]. Then came AlphaGo [4] that combines ReLU Monte Carlo Tree Search (MCTS) with a policy and a value network. Deep neural networks are good at recognizing shapes in the game of Go. However they have weaknesses at tactical search Output such as ladders and life and death. The way it is handled in AlphaGo is to give as input to the network the results of Fig. 1. The usual layer for computer Go. ladders. Reading ladders is not enough to understand more complex problems that require search. So AlphaGo combines deep networks with MCTS [5]. It learns a value network the last section concludes. -
![Arxiv:1701.07274V3 [Cs.LG] 15 Jul 2017](https://docslib.b-cdn.net/cover/8220/arxiv-1701-07274v3-cs-lg-15-jul-2017-78220.webp)
Arxiv:1701.07274V3 [Cs.LG] 15 Jul 2017
DEEP REINFORCEMENT LEARNING:AN OVERVIEW Yuxi Li ([email protected]) ABSTRACT We give an overview of recent exciting achievements of deep reinforcement learn- ing (RL). We discuss six core elements, six important mechanisms, and twelve applications. We start with background of machine learning, deep learning and reinforcement learning. Next we discuss core RL elements, including value func- tion, in particular, Deep Q-Network (DQN), policy, reward, model, planning, and exploration. After that, we discuss important mechanisms for RL, including atten- tion and memory, in particular, differentiable neural computer (DNC), unsuper- vised learning, transfer learning, semi-supervised learning, hierarchical RL, and learning to learn. Then we discuss various applications of RL, including games, in particular, AlphaGo, robotics, natural language processing, including dialogue systems (a.k.a. chatbots), machine translation, and text generation, computer vi- sion, neural architecture design, business management, finance, healthcare, Indus- try 4.0, smart grid, intelligent transportation systems, and computer systems. We mention topics not reviewed yet. After listing a collection of RL resources, we present a brief summary, and close with discussions. arXiv:1701.07274v3 [cs.LG] 15 Jul 2017 1 CONTENTS 1 Introduction5 2 Background6 2.1 Machine Learning . .7 2.2 Deep Learning . .8 2.3 Reinforcement Learning . .9 2.3.1 Problem Setup . .9 2.3.2 Value Function . .9 2.3.3 Temporal Difference Learning . .9 2.3.4 Multi-step Bootstrapping . 10 2.3.5 Function Approximation . 11 2.3.6 Policy Optimization . 12 2.3.7 Deep Reinforcement Learning . 12 2.3.8 RL Parlance . 13 2.3.9 Brief Summary . -

ELF: an Extensive, Lightweight and Flexible Research Platform for Real-Time Strategy Games
ELF: An Extensive, Lightweight and Flexible Research Platform for Real-time Strategy Games Yuandong Tian1 Qucheng Gong1 Wenling Shang2 Yuxin Wu1 C. Lawrence Zitnick1 1Facebook AI Research 2Oculus 1fyuandong, qucheng, yuxinwu, [email protected] [email protected] Abstract In this paper, we propose ELF, an Extensive, Lightweight and Flexible platform for fundamental reinforcement learning research. Using ELF, we implement a highly customizable real-time strategy (RTS) engine with three game environ- ments (Mini-RTS, Capture the Flag and Tower Defense). Mini-RTS, as a minia- ture version of StarCraft, captures key game dynamics and runs at 40K frame- per-second (FPS) per core on a laptop. When coupled with modern reinforcement learning methods, the system can train a full-game bot against built-in AIs end- to-end in one day with 6 CPUs and 1 GPU. In addition, our platform is flexible in terms of environment-agent communication topologies, choices of RL methods, changes in game parameters, and can host existing C/C++-based game environ- ments like ALE [4]. Using ELF, we thoroughly explore training parameters and show that a network with Leaky ReLU [17] and Batch Normalization [11] cou- pled with long-horizon training and progressive curriculum beats the rule-based built-in AI more than 70% of the time in the full game of Mini-RTS. Strong per- formance is also achieved on the other two games. In game replays, we show our agents learn interesting strategies. ELF, along with its RL platform, is open sourced at https://github.com/facebookresearch/ELF. 1 Introduction Game environments are commonly used for research in Reinforcement Learning (RL), i.e. -

Improved Policy Networks for Computer Go
Improved Policy Networks for Computer Go Tristan Cazenave Universite´ Paris-Dauphine, PSL Research University, CNRS, LAMSADE, PARIS, FRANCE Abstract. Golois uses residual policy networks to play Go. Two improvements to these residual policy networks are proposed and tested. The first one is to use three output planes. The second one is to add Spatial Batch Normalization. 1 Introduction Deep Learning for the game of Go with convolutional neural networks has been ad- dressed by [2]. It has been further improved using larger networks [7, 10]. AlphaGo [9] combines Monte Carlo Tree Search with a policy and a value network. Residual Networks improve the training of very deep networks [4]. These networks can gain accuracy from considerably increased depth. On the ImageNet dataset a 152 layers networks achieves 3.57% error. It won the 1st place on the ILSVRC 2015 classifi- cation task. The principle of residual nets is to add the input of the layer to the output of each layer. With this simple modification training is faster and enables deeper networks. Residual networks were recently successfully adapted to computer Go [1]. As a follow up to this paper, we propose improvements to residual networks for computer Go. The second section details different proposed improvements to policy networks for computer Go, the third section gives experimental results, and the last section con- cludes. 2 Proposed Improvements We propose two improvements for policy networks. The first improvement is to use multiple output planes as in DarkForest. The second improvement is to use Spatial Batch Normalization. 2.1 Multiple Output Planes In DarkForest [10] training with multiple output planes containing the next three moves to play has been shown to improve the level of play of a usual policy network with 13 layers. -

Fml-Based Dynamic Assessment Agent for Human-Machine Cooperative System on Game of Go
Accepted for publication in International Journal of Uncertainty, Fuzziness and Knowledge-Based Systems in July, 2017 FML-BASED DYNAMIC ASSESSMENT AGENT FOR HUMAN-MACHINE COOPERATIVE SYSTEM ON GAME OF GO CHANG-SHING LEE* MEI-HUI WANG, SHENG-CHI YANG Department of Computer Science and Information Engineering, National University of Tainan, Tainan, Taiwan *[email protected], [email protected], [email protected] PI-HSIA HUNG, SU-WEI LIN Department of Education, National University of Tainan, Tainan, Taiwan [email protected], [email protected] NAN SHUO, NAOYUKI KUBOTA Dept. of System Design, Tokyo Metropolitan University, Japan [email protected], [email protected] CHUN-HSUN CHOU, PING-CHIANG CHOU Haifong Weiqi Academy, Taiwan [email protected], [email protected] CHIA-HSIU KAO Department of Computer Science and Information Engineering, National University of Tainan, Tainan, Taiwan [email protected] Received (received date) Revised (revised date) Accepted (accepted date) In this paper, we demonstrate the application of Fuzzy Markup Language (FML) to construct an FML- based Dynamic Assessment Agent (FDAA), and we present an FML-based Human–Machine Cooperative System (FHMCS) for the game of Go. The proposed FDAA comprises an intelligent decision-making and learning mechanism, an intelligent game bot, a proximal development agent, and an intelligent agent. The intelligent game bot is based on the open-source code of Facebook’s Darkforest, and it features a representational state transfer application programming interface mechanism. The proximal development agent contains a dynamic assessment mechanism, a GoSocket mechanism, and an FML engine with a fuzzy knowledge base and rule base. -

Residual Networks for Computer Go Tristan Cazenave
Residual Networks for Computer Go Tristan Cazenave To cite this version: Tristan Cazenave. Residual Networks for Computer Go. IEEE Transactions on Games, Institute of Electrical and Electronics Engineers, 2018, 10 (1), 10.1109/TCIAIG.2017.2681042. hal-02098330 HAL Id: hal-02098330 https://hal.archives-ouvertes.fr/hal-02098330 Submitted on 12 Apr 2019 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. IEEE TCIAIG 1 Residual Networks for Computer Go Tristan Cazenave Universite´ Paris-Dauphine, PSL Research University, CNRS, LAMSADE, 75016 PARIS, FRANCE Deep Learning for the game of Go recently had a tremendous success with the victory of AlphaGo against Lee Sedol in March 2016. We propose to use residual networks so as to improve the training of a policy network for computer Go. Training is faster than with usual convolutional networks and residual networks achieve high accuracy on our test set and a 4 dan level. Index Terms—Deep Learning, Computer Go, Residual Networks. I. INTRODUCTION Input EEP Learning for the game of Go with convolutional D neural networks has been addressed by Clark and Storkey [1]. It has been further improved by using larger networks [2]. -

Move Prediction in Gomoku Using Deep Learning
VW<RXWK$FDGHPLF$QQXDO&RQIHUHQFHRI&KLQHVH$VVRFLDWLRQRI$XWRPDWLRQ :XKDQ&KLQD1RYHPEHU Move Prediction in Gomoku Using Deep Learning Kun Shao, Dongbin Zhao, Zhentao Tang, and Yuanheng Zhu The State Key Laboratory of Management and Control for Complex Systems, Institute of Automation, Chinese Academy of Sciences Beijing 100190, China Emails: [email protected]; [email protected]; [email protected]; [email protected] Abstract—The Gomoku board game is a longstanding chal- lenge for artificial intelligence research. With the development of deep learning, move prediction can help to promote the intelli- gence of board game agents as proven in AlphaGo. Following this idea, we train deep convolutional neural networks by supervised learning to predict the moves made by expert Gomoku players from RenjuNet dataset. We put forward a number of deep neural networks with different architectures and different hyper- parameters to solve this problem. With only the board state as the input, the proposed deep convolutional neural networks are able to recognize some special features of Gomoku and select the most likely next move. The final neural network achieves the accuracy of move prediction of about 42% on the RenjuNet dataset, which reaches the level of expert Gomoku players. In addition, it is promising to generate strong Gomoku agents of human-level with the move prediction as a guide. Keywords—Gomoku; move prediction; deep learning; deep convo- lutional network Fig. 1. Example of positions from a game of Gomoku after 58 moves have passed. It can be seen that the white win the game at last. I. -

ELF Opengo: an Analysis and Open Reimplementation of Alphazero
ELF OpenGo: An Analysis and Open Reimplementation of AlphaZero Yuandong Tian 1 Jerry Ma * 1 Qucheng Gong * 1 Shubho Sengupta * 1 Zhuoyuan Chen 1 James Pinkerton 1 C. Lawrence Zitnick 1 Abstract However, these advances in playing ability come at signifi- The AlphaGo, AlphaGo Zero, and AlphaZero cant computational expense. A single training run requires series of algorithms are remarkable demonstra- millions of selfplay games and days of training on thousands tions of deep reinforcement learning’s capabili- of TPUs, which is an unattainable level of compute for the ties, achieving superhuman performance in the majority of the research community. When combined with complex game of Go with progressively increas- the unavailability of code and models, the result is that the ing autonomy. However, many obstacles remain approach is very difficult, if not impossible, to reproduce, in the understanding of and usability of these study, improve upon, and extend. promising approaches by the research commu- In this paper, we propose ELF OpenGo, an open-source nity. Toward elucidating unresolved mysteries reimplementation of the AlphaZero (Silver et al., 2018) and facilitating future research, we propose ELF algorithm for the game of Go. We then apply ELF OpenGo OpenGo, an open-source reimplementation of the toward the following three additional contributions. AlphaZero algorithm. ELF OpenGo is the first open-source Go AI to convincingly demonstrate First, we train a superhuman model for ELF OpenGo. Af- superhuman performance with a perfect (20:0) ter running our AlphaZero-style training software on 2,000 record against global top professionals. We ap- GPUs for 9 days, our 20-block model has achieved super- ply ELF OpenGo to conduct extensive ablation human performance that is arguably comparable to the 20- studies, and to identify and analyze numerous in- block models described in Silver et al.(2017) and Silver teresting phenomena in both the model training et al.(2018). -

Combining Tactical Search and Deep Learning in the Game of Go
Combining tactical search and deep learning in the game of Go Tristan Cazenave PSL-Universite´ Paris-Dauphine, LAMSADE CNRS UMR 7243, Paris, France [email protected] Abstract Elaborated search algorithms have been developed to solve tactical problems in the game of Go such as capture problems In this paper we experiment with a Deep Convo- [Cazenave, 2003] or life and death problems [Kishimoto and lutional Neural Network for the game of Go. We Muller,¨ 2005]. In this paper we propose to combine tactical show that even if it leads to strong play, it has search algorithms with deep learning. weaknesses at tactical search. We propose to com- Other recent works combine symbolic and deep learn- bine tactical search with Deep Learning to improve ing approaches. For example in image surveillance systems Golois, the resulting Go program. A related work [Maynord et al., 2016] or in systems that combine reasoning is AlphaGo, it combines tactical search with Deep with visual processing [Aditya et al., 2015]. Learning giving as input to the network the results The next section presents our deep learning architecture. of ladders. We propose to extend this further to The third section presents tactical search in the game of Go. other kind of tactical search such as life and death The fourth section details experimental results. search. 2 Deep Learning 1 Introduction In the design of our network we follow previous work [Mad- Deep Learning has been recently used with a lot of success dison et al., 2014; Tian and Zhu, 2015]. Our network is fully in multiple different artificial intelligence tasks. -

Deep Learning for Go
Research Collection Bachelor Thesis Deep Learning for Go Author(s): Rosenthal, Jonathan Publication Date: 2016 Permanent Link: https://doi.org/10.3929/ethz-a-010891076 Rights / License: In Copyright - Non-Commercial Use Permitted This page was generated automatically upon download from the ETH Zurich Research Collection. For more information please consult the Terms of use. ETH Library Deep Learning for Go Bachelor Thesis Jonathan Rosenthal June 18, 2016 Advisors: Prof. Dr. Thomas Hofmann, Dr. Martin Jaggi, Yannic Kilcher Department of Computer Science, ETH Z¨urich Contents Contentsi 1 Introduction1 1.1 Overview of Thesis......................... 1 1.2 Jorogo Code Base and Contributions............... 2 2 The Game of Go5 2.1 Etymology and History ...................... 5 2.2 Rules of Go ............................. 6 2.2.1 Game Terms......................... 6 2.2.2 Legal Moves......................... 7 2.2.3 Scoring............................ 8 3 Computer Chess vs Computer Go 11 3.1 Available Resources......................... 11 3.2 Open Source Projects........................ 11 3.3 Branching Factor .......................... 12 3.4 Evaluation Heuristics........................ 13 3.5 Machine Learning.......................... 13 4 Search Algorithms 15 4.1 Minimax............................... 15 4.1.1 Iterative Deepening .................... 16 4.2 Alpha-Beta.............................. 17 4.2.1 Move Ordering Analysis.................. 18 4.2.2 History Heuristic...................... 18 4.3 Probability Based Search...................... 19 4.3.1 Performance......................... 20 4.4 Monte-Carlo Tree Search...................... 21 5 Evaluation Algorithms 23 i Contents 5.1 Heuristic Based........................... 23 5.1.1 Bouzy’s Algorithm..................... 24 5.2 Final Positions............................ 24 5.3 Monte-Carlo............................. 25 5.4 Neural Network........................... 25 6 Neural Network Architectures 27 6.1 Networks in Giraffe........................ -
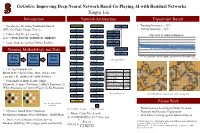
Gogogo: Improving Deep Neural Network Based Go Playing AI with Residual Networks Xingyu Liu Introduction Network Architecture Experiment Result
GoGoGo: Improving Deep Neural Network Based Go Playing AI with Residual Networks Xingyu Liu Introduction Network Architecture Experiment Result • Go playing AIs using Traditional Search: Input (19x19x5) Input (19x19x5) Data • Training Accuracy ~ 32% GNU Go, Pachi, Fuego, Zen etc. • Testing Accuracy ~ 26% CONV3, 64 CONV3, 64 CONV3 • Powered by Deep Learning: Batch Norm Supervised Learning Training Loss CONV3, 64 CONV3, 64 Zen → Deep Zen Go, darkforest, AlphaGo ReLU 7 6 • Goal: From by Vanilla CNN to ResNets CONV3, 64 CONV3, 64 CONV3 5 Batch Norm 4 CONV3, 64 CONV3, 64 3 Eltwise Add Training Methodology and Data 2 CONV3, 64 CONV3, 64 1 ReLU 0 1 365 183 547 729 911 1275 2185 5461 6371 7281 8191 1457 1639 1821 2003 2367 2549 2731 2913 3095 3277 3459 3641 3823 4005 4187 4369 4551 4733 4915 5097 5279 5643 5825 6007 6189 6553 6735 6917 7099 7463 7645 7827 8009 8373 8555 8737 SL on RL on RL on 1093 CONV3, 64 CONV3, 64 Policy Policy Value (c) Residual Module /100 batches Network Network Network CONV3, 64 CONV3, 64 • Use Ing Chang-ki rule CONV3, 64 CONV3, 64 Board State + Ko is Game State, No need to Hyperparameters Value CONV3, 64 CONV3, 64 Base learning rate 2E-4 remember the number of captured stones Decay Policy Exp CONV3, 64 CONV3, 64 • From Kifu to Input Feature Maps Decay Rate 0.95 Channels: 1) Space Positions; 2) Black Positions; 3) CONV3, 64 CONV3, 64 Decay Step (kifu) 200 White Positions; 4) Current Player; 5) Ko Positions Loss Function Softmax CONV3, 64 CONV3, 64 (b) Hyperparameters Fig. -

Improved Policy Networks for Computer Go Tristan Cazenave
Improved Policy Networks for Computer Go Tristan Cazenave To cite this version: Tristan Cazenave. Improved Policy Networks for Computer Go. 15th International Conferences (ACG 2017), Jul 2017, Leiden, Netherlands. pp.90-100, 10.1007/978-3-319-71649-7_8. hal-02098463 HAL Id: hal-02098463 https://hal.archives-ouvertes.fr/hal-02098463 Submitted on 12 Apr 2019 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Improved Policy Networks for Computer Go Tristan Cazenave Universite´ Paris-Dauphine, PSL Research University, CNRS, LAMSADE, PARIS, FRANCE Abstract. Golois uses residual policy networks to play Go. Two improvements to these residual policy networks are proposed and tested. The first one is to use three output planes. The second one is to add Spatial Batch Normalization. 1 Introduction Deep Learning for the game of Go with convolutional neural networks has been ad- dressed by [2]. It has been further improved using larger networks [7, 10]. AlphaGo [9] combines Monte Carlo Tree Search with a policy and a value network. Residual Networks improve the training of very deep networks [4]. These networks can gain accuracy from considerably increased depth. On the ImageNet dataset a 152 layers networks achieves 3.57% error.