Fuel Flow Control Issue in Jet Engines: an Evolvable Hardware Approach
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Propulsion Controls at NASA Lewis
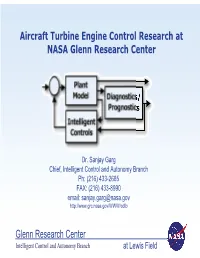
Aircraft Turbine Engine Control Research at NASA Glenn Research Center Dr. Sanjay Garg Chief, Intelligent Control and Autonomy Branch Ph: (216) 433-2685 FAX: (216) 433-8990 email: [email protected] http://www.grc.nasa.gov/WWW/cdtb Glenn Research Center Intelligent Control and Autonomy Branch at Lewis Field Outline – The Engine Control Problem • Safety and Operational Limits • State-of-the-Art Engine Control Logic Architecture – Historical Glenn Research Center Contributions • Early Stages of Turbine Engine Control (1945-1960s) • Maturation of Turbine Engine Control (1970-1990) – Advanced Engine Control Research • Recent Significant Accomplishments (1990- 2004) • Current Research (2004 onwards) – Conclusion Glenn Research Center Intelligent Control and Autonomy Branch at Lewis Field Basic Engine Control Concept • Objective: Provide smooth, stable, and stall free operation of the engine via single input (PLA) with no throttle restrictions • Reliable and predictable throttle movement to thrust response • Issues: • Thrust cannot be measured • Changes in ambient condition and aircraft maneuvers cause distortion into the fan/compressor • Harsh operating environment – high temperatures and large vibrations • Safe operation – avoid stall, combustor blow out etc. • Need to provide long operating life – 20,000 hours • Engine components degrade with usage – need to have reliable performance throughout the operating life Glenn Research Center Intelligent Control and Autonomy Branch at Lewis Field Basic Engine Control Concept • Since Thrust (T) -

Propulsion Systems for Aircraft. Aerospace Education II
. DOCUMENT RESUME ED 111 621 SE 017 458 AUTHOR Mackin, T. E. TITLE Propulsion Systems for Aircraft. Aerospace Education II. INSTITUTION 'Air Univ., Maxwell AFB, Ala. Junior Reserve Office Training Corps.- PUB.DATE 73 NOTE 136p.; Colored drawings may not reproduce clearly. For the accompanying Instructor Handbook, see SE 017 459. This is a revised text for ED 068 292 EDRS PRICE, -MF-$0.76 HC.I$6.97 Plus' Postage DESCRIPTORS *Aerospace 'Education; *Aerospace Technology;'Aviation technology; Energy; *Engines; *Instructional-. Materials; *Physical. Sciences; Science Education: Secondary Education; Textbooks IDENTIFIERS *Air Force Junior ROTC ABSTRACT This is a revised text used for the Air Force ROTC _:_progralit._The main part of the book centers on the discussion -of the . engines in an airplane. After describing the terms and concepts of power, jets, and4rockets, the author describes reciprocating engines. The description of diesel engines helps to explain why theseare not used in airplanes. The discussion of the carburetor is followed byan explanation of the lubrication system. The chapter on reaction engines describes the operation of,jets, with examples of different types of jet engines.(PS) . 4,,!It********************************************************************* * Documents acquired by, ERIC include many informal unpublished * materials not available from other souxces. ERIC makes every effort * * to obtain the best copravailable. nevertheless, items of marginal * * reproducibility are often encountered and this affects the quality * * of the microfiche and hardcopy reproductions ERIC makes available * * via the ERIC Document" Reproduction Service (EDRS). EDRS is not * responsible for the quality of the original document. Reproductions * * supplied by EDRS are the best that can be made from the original. -

2. Afterburners
2. AFTERBURNERS 2.1 Introduction The simple gas turbine cycle can be designed to have good performance characteristics at a particular operating or design point. However, a particu lar engine does not have the capability of producing a good performance for large ranges of thrust, an inflexibility that can lead to problems when the flight program for a particular vehicle is considered. For example, many airplanes require a larger thrust during takeoff and acceleration than they do at a cruise condition. Thus, if the engine is sized for takeoff and has its design point at this condition, the engine will be too large at cruise. The vehicle performance will be penalized at cruise for the poor off-design point operation of the engine components and for the larger weight of the engine. Similar problems arise when supersonic cruise vehicles are considered. The afterburning gas turbine cycle was an early attempt to avoid some of these problems. Afterburners or augmentation devices were first added to aircraft gas turbine engines to increase their thrust during takeoff or brief periods of acceleration and supersonic flight. The devices make use of the fact that, in a gas turbine engine, the maximum gas temperature at the turbine inlet is limited by structural considerations to values less than half the adiabatic flame temperature at the stoichiometric fuel-air ratio. As a result, the gas leaving the turbine contains most of its original concentration of oxygen. This oxygen can be burned with additional fuel in a secondary combustion chamber located downstream of the turbine where temperature constraints are relaxed. -
F404 Turbofan Engines 17,700-19,000 Lb Thrust Range
www.ge.com/aviation F404 turbofan engines 17,700-19,000 lb thrust range The F404 family of engines powers a broad spectrum afterburner sections result in increased performance of aircraft with missions ranging from low-level subsonic while maintaining the F404’s characteristic durability. attack to high-altitude interception. The first version of Its simple, modular design is reliable and easy to the F404 was developed to power the Boeing F/A-18, maintain. and non-afterburning derivatives powered the F-117A The F404/RM12 is a derivative developed in conjunction Stealth Fighter and the Singapore A4-SU Super Skyhawk. with Volvo Aero Corporation to power the Saab Gripen, Developed for the Korean KAI/LMTAS T-50 advanced a multi-role fighter, attack and reconnaissance aircraft. trainer/light fighter, the F404-GE-102 is the latest The F404/RM12 model also includes single-engine safety derivative of the F404 family. It includes single-engine features and a FADEC. safety features and a Full Authority Digital Electronic The F404-GE-IN20 engine is an enhanced production Control (FADEC) derived from GE’s F414 engine. The version of the F404, which is successfully powering F404-GE-102 is supplied to ROKAF by Samsung Techwin India’s Light Combat Aircraft MKI. The highest thrust under a licensed production program with GE. variant of the F404 family, the F404-GE-IN20 The F404-GE-402 provides higher power, improved incorporates GE’s latest hot section materials and fuel efficiency and increased mission capability for the technologies, as well as a FADEC for reliable power and combat-proven Boeing F/A-18C/D Hornet. -

The Power for Flight: NASA's Contributions To
The Power Power The forFlight NASA’s Contributions to Aircraft Propulsion for for Flight Jeremy R. Kinney ThePower for NASA’s Contributions to Aircraft Propulsion Flight Jeremy R. Kinney Library of Congress Cataloging-in-Publication Data Names: Kinney, Jeremy R., author. Title: The power for flight : NASA’s contributions to aircraft propulsion / Jeremy R. Kinney. Description: Washington, DC : National Aeronautics and Space Administration, [2017] | Includes bibliographical references and index. Identifiers: LCCN 2017027182 (print) | LCCN 2017028761 (ebook) | ISBN 9781626830387 (Epub) | ISBN 9781626830370 (hardcover) ) | ISBN 9781626830394 (softcover) Subjects: LCSH: United States. National Aeronautics and Space Administration– Research–History. | Airplanes–Jet propulsion–Research–United States– History. | Airplanes–Motors–Research–United States–History. Classification: LCC TL521.312 (ebook) | LCC TL521.312 .K47 2017 (print) | DDC 629.134/35072073–dc23 LC record available at https://lccn.loc.gov/2017027182 Copyright © 2017 by the National Aeronautics and Space Administration. The opinions expressed in this volume are those of the authors and do not necessarily reflect the official positions of the United States Government or of the National Aeronautics and Space Administration. This publication is available as a free download at http://www.nasa.gov/ebooks National Aeronautics and Space Administration Washington, DC Table of Contents Dedication v Acknowledgments vi Foreword vii Chapter 1: The NACA and Aircraft Propulsion, 1915–1958.................................1 Chapter 2: NASA Gets to Work, 1958–1975 ..................................................... 49 Chapter 3: The Shift Toward Commercial Aviation, 1966–1975 ...................... 73 Chapter 4: The Quest for Propulsive Efficiency, 1976–1989 ......................... 103 Chapter 5: Propulsion Control Enters the Computer Era, 1976–1998 ........... 139 Chapter 6: Transiting to a New Century, 1990–2008 .................................... -

Design of a Turbofan Engine Cycle with Afterburner for a Conceptual UAV
Design of a Turbofan Engine Cycle with Afterburner for a Conceptual UAV BJÖRN MONTGOMERIE Mixed fl ow turbofan schematic FOI is an assignment-based authority under the Ministry of Defence. The core activities are research, method and technology development, as well as studies for the use of defence and security. The organization employs around 1350 people of whom around 950 are researchers. This makes FOI the largest research institute in Sweden. FOI provides its customers with leading expertise in a large number of fi elds such as security-policy studies and analyses in defence and security, assessment of dif- ferent types of threats, systems for control and management of crises, protection against and management of hazardous substances, IT-security an the potential of new sensors. FOI Defence Research Agency Phone: +46 8 555 030 00 www.foi.se Systems Technology Fax: +46 8 555 031 00 FOI-R-- 1835 --SE Scientifi c report Systems Technology SE-164 90 Stockholm ISSN 1650-1942 December 2005 Björn Montgomerie Design of a Turbofan Engine Cycle with Afterburner for a Conceptual UAV FOI-R--1835--SE Scientific report Systems Technology ISSN 1650-1942 December 2005 Issuing organization Report number, ISRN Report type FOI – Swedish Defence Research Agency FOI-R--1835--SE Scientific report Systems Technology Research area code SE-164 90 Stockholm 7. Mobility and space technology, incl materials Month year Project no. December 2005 E830058 Sub area code 71 Unmanned Vehicles Sub area code 2 Author/s (editor/s) Project manager Björn Montgomerie Fredrik Haglind Approved by Monica Dahlén Sponsoring agency Swedish Defense Materiel Administration (FMV) Scientifically and technically responsible Fredrik Haglind Report title Design of a Turbofan Engine Cycle with Afterburner for a Conceptual UAV Abstract A study of two turbofan engine types has been carried out. -

Combustion and Fuels Research Talks
.. COMBUSTION AND FUELS RESEARCH Part I - High-Output Turbojet Combustors • 'A by Wilfred E. Scull and Richard H. Donlon . " You have already seen, or will see elsewhere, a portion of the laboratory's research effort on compressors for handling higher air flows. Higher air flows through the engine are neoeaaary to obtain higher thrusts. To go with the compressors of inoreased capacities, we must also have priJ'D8.ry oombustors and afterburners which can handle higher air flows, or operate at higher velocities. ( A part of our combustion research is aimed therefore at obtaining high performance at high air velocities in the primary combustor, and it is this phase of the work that I would like to discuss now. Higa air velocities in the primary combustor result in several problems; ~ for example, stable combustion at the air velocities found in present day equipment might be analogous to keeping a matoh burning in a hurrioane. Combustion at high air velocities must occur with as high a combustion efficiency and as low pressure losses as possible. In general, combustion efficiency may be defined as the ratio of heat , . output of the combustor to the heat imput of the fuel. Pressure losses are caused by the flow resistance of the combustor liner, and changes in velocity of the air during combustion. '\ We would now like to demonstrate some results of our research to " develop combustors which can operate at high air .veloeities. The primary oombustor of the turbojet engine consists of a housing and a liner. !he liner, which is installed within the housing, shields the oombustion space from the blast of incoming air. -
04 Propulsion
Aircraft Design Lecture 2: Aircraft Propulsion G. Dimitriadis and O. Léonard APRI0004-1, Aerospace Design Project, Lecture 4 1 Introduction • A large variety of propulsion methods have been used from the very start of the aerospace era: – No propulsion (balloons, gliders) – Muscle (mostly failed) – Steam power (mostly failed) – Piston engines and propellers – Rocket engines – Jet engines – Pulse jet engines – Ramjet – Scramjet APRI0004-1, Aerospace Design Project, Lecture 4 2 Gliding flight • People have been gliding from the- mid 18th century. The Albatross II by Jean Marie Le Bris- 1849 Otto Lillienthal , 1895 APRI0004-1, Aerospace Design Project, Lecture 4 3 Human-powered flight • Early attempts were less than successful but better results were obtained from the 1960s onwards. Gerhardt Cycleplane (1923) MIT Daedalus (1988) APRI0004-1, Aerospace Design Project, Lecture 4 4 Steam powered aircraft • Mostly dirigibles, unpiloted flying models and early aircraft Clément Ader Avion III (two 30hp steam engines, 1897) Giffard dirigible (1852) APRI0004-1, Aerospace Design Project, Lecture 4 5 Engine requirements • A good aircraft engine is characterized by: – Enough power to fulfill the mission • Take-off, climb, cruise etc. – Low weight • High weight increases the necessary lift and therefore the drag. – High efficiency • Low efficiency increases the amount fuel required and therefore the weight and therefore the drag. – High reliability – Ease of maintenance APRI0004-1, Aerospace Design Project, Lecture 4 6 Piston engines • Wright Flyer: One engine driving two counter- rotating propellers (one port one starboard) via chains. – Four in-line cylinders – Power: 12hp – Weight: 77 kg APRI0004-1, Aerospace Design Project, Lecture 4 7 Piston engine development • During the first half of the 20th century there was considerable development of piston engines. -

An Online Performance Calculator for Ramjet, Turbojet, Turbofan, and Turboprop Engines
An Online Performance Calculator for Ramjet, Turbojet, Turbofan, and Turboprop Engines Evan P. Warner∗ Virginia Tech, Blacksburg, VA, 24061, USA This paper documents the theory, equations, and assumptions behind an HTML-based online performance calculator for ramjet, turbojet, turbofan, and turboprop engines. Based on inputs of design parameters, flight con- ditions, and engine parameters, the specific thrust (()), thrust specific fuel consumption ()(), propulsive efficiency ([ ?), thermal efficiency ([Cℎ), and overall efficiency ([0) will be output for the engine of interest. Several sample cases are analyzed to verify the functionality of the calculator. These sample cases are derived from engines associated with Virginia Tech, which include: Pratt & Whitney’s PT6A-20 and JT15D-1, Honeywell’s TFE731-2B, and the Rolls Royce Trent 1000. With the help of this calculator, students will now be able to verify their air-breathing jet engine performance value calculations. This calculator is available here. I. Nomenclature "0 = Ambient Mach Number 2 ?1 = Specific Heat of the Burner W0 = Ambient Specific Heat Ratio 2 ?C = Specific Heat of the Turbine W3 = Diffuser Specific Heat Ratio 2 ? 5 = Specific Heat of the Fan W2 = Compressor Specific Heat Ratio )0 = Ambient Static Temperature W1 = Burner Specific Heat Ratio ?0 = Ambient Static Pressure WC = Turbine Specific Heat Ratio ?4 = Exit Static Pressure W= = Nozzle Specific Heat Ratio '08A = Gas Constant for Air W 5 = Fan Specific Heat Ratio '?A>3 = Gas Constant for the Products of Fuel/Air Mixture W= 5 = Fan Nozzle -

A Method for Aircraft Afterburner Combustion
A METHOD FOR AIRCRAFT AFTERBURNER COMBUSTION WITHOUT FLAMEHOLDERS A Dissertation Presented to The Academic Faculty By Shai Birmaher In Partial Fulfillment of the Requirements for the Degree Doctor of Philosophy in Aerospace Engineering Georgia Institute of Technology May 2009 A METHOD FOR AIRCRAFT AFTERBURNER COMBUSTION WITHOUT FLAMEHOLDERS Approved by: Dr. Ben T. Zinn, Advisor Dr. Rick Gaeta School of Aerospace Engineering School of Aerospace Engineering Georgia Institute of Technology Georgia Institute of Technology Dr. Yedidia Neumeier Dr. Jeff Jagoda School of Aerospace Engineering School of Aerospace Engineering Georgia Institute of Technology Georgia Institute of Technology Dr. Thomas Fuller School of Chemical and Biomolecular Engineering Georgia Institute of Technology Date Approved: February 27, 2009 ACKNOWLEDGEMENTS I would like to first thank my advisor, Dr. Ben Zinn, for his valuable guidance and support throughout the course of this work . I wish to thank Dr. Yedidia Neumeier. This research would not have been possible without Yedidia, whose innovation and sense of humor enriched my experience at Georgia Tech. I would also like to thank the other members of my committee, Dr. Jeff Jagoda, Dr. Rick Gaeta, and Dr. Thomas Fuller, for their input and interest in this research. I would like to thank the research engineers and Georgia Tech staff who contributed to this work. Thanks to Sasha Bibik and Dimitriy Shcherbik for their technical expertise and willingness to help at a moment’s notice. Also, thanks to Scott Moseley and Scott Elliott for their friendly and skillful support at the machine shop. I wish to thank all the graduate students at the Ben Zinn Combustion Lab for their help and encouragement. -

Research Paper CFD Anaylsis of Improving Thrust in Afterburner By
Volume-3, Issue-11, Nov Special Issue -2014 • ISSN No 2277 - 8160 Research Paper Engineering & Technology CFD Anaylsis of Improving Thrust in Afterburner By Configuration Changes Assistant Professor, Department of Aerospace Engineering Periyar Maniammai SATHISH.D University, Tamilnadu, India ABSTRACT The ever-widening spectrum of high-speed flight imposes new and greater demands upon turbojet aircraft propulsion systems. One of the propulsion system components affected is the afterburner. In designs where the use of an afterburner is considered, the specifications become quite rigid, not only in terms of performance required at severe operating conditions, but also in terms of geometrical changes often made necessary by space and structural limitations. Afterburner combustion performance is influenced by many individual factors and their mutual interaction. Fuel properties and reaction kinetics are some of the factors which are chemical in nature. Pressure, temperature, and velocity of the mixture approaching the afterburner combustion chamber are aero thermodynamic factors. Still other factors such as flame holder gutter dimensions and gutter arrangement are of a geometrical nature. These and other factors both singly and collectively affect the performance of a given afterburner. Usually due to unstabilized combustion inside the afterburner most of oxygen is escaped remaining unburned. The aim of the project is to utilize maximum amount of the available unburned oxygen from the primary combustor inside the afterburner to achieve more combustion by stabilizing the flame and thereby producing high velocity jet at the exit. The size and shape of the afterburner may also affect the combustion performance and flame stabilization. So by changing the configuration of the afterburner thereby producing uniform combustion by utilizing maximum amount of available unburned oxygen from the primary combustor and achieving high performance in terms of exit velocity even more when compared to performance of actual afterburner. -

Military Jet Engine Acquisition
Military Jet Engine Acquisition Technology Basics and Cost-Estimating Methodology Obaid Younossi, Mark V. Arena, Richard M. Moore Mark Lorell, Joanna Mason, John C. Graser Prepared for the United States Air Force Approved for Public Release; Distribution Unlimited R Project AIR FORCE The research reported here was sponsored by the United States Air Force under Contract F49642-01-C-0003. Further information may be obtained from the Strategic Planning Division, Directorate of Plans, Hq USAF. Library of Congress Cataloging-in-Publication Data Military jet engine acquisition : technology basics and cost-estimating methodology / Obaid Younossi ... [et al.]. p. cm. “MR-1596.” Includes bibliographical references. ISBN 0-8330-3282-8 (pbk.) 1. United States—Armed Forces—Procurement—Costs. 2. Airplanes— Motors—Costs. 3. Jet planes, Military—United States—Costs. 4. Jet engines— Costs. I. Younossi, Obaid. UG1123 .M54 2002 355.6'212'0973—dc21 2002014646 RAND is a nonprofit institution that helps improve policy and decisionmaking through research and analysis. RAND® is a registered trademark. RAND’s publications do not necessarily reflect the opinions or policies of its research sponsors. © Copyright 2002 RAND All rights reserved. No part of this book may be reproduced in any form by any electronic or mechanical means (including photocopying, recording, or information storage and retrieval) without permission in writing from RAND. Published 2002 by RAND 1700 Main Street, P.O. Box 2138, Santa Monica, CA 90407-2138 1200 South Hayes Street, Arlington, VA 22202-5050 201 North Craig Street, Suite 202, Pittsburgh, PA 15213-1516 RAND URL: http://www.rand.org/ To order RAND documents or to obtain additional information, contact Distribution Services: Telephone: (310) 451-7002; Fax: (310) 451-6915; Email: [email protected] PREFACE In recent years, the affordability of weapon systems has become increasingly important to policymakers in the Department of Defense and U.S.