Impact of Hard Fouling on the Ship Performance of Different Ship Forms
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

10-1 CHAPTER 10 DEFORMATION 10.1 Stress-Strain Diagrams And
EN380 Naval Materials Science and Engineering Course Notes, U.S. Naval Academy CHAPTER 10 DEFORMATION 10.1 Stress-Strain Diagrams and Material Behavior 10.2 Material Characteristics 10.3 Elastic-Plastic Response of Metals 10.4 True stress and strain measures 10.5 Yielding of a Ductile Metal under a General Stress State - Mises Yield Condition. 10.6 Maximum shear stress condition 10.7 Creep Consider the bar in figure 1 subjected to a simple tension loading F. Figure 1: Bar in Tension Engineering Stress () is the quotient of load (F) and area (A). The units of stress are normally pounds per square inch (psi). = F A where: is the stress (psi) F is the force that is loading the object (lb) A is the cross sectional area of the object (in2) When stress is applied to a material, the material will deform. Elongation is defined as the difference between loaded and unloaded length ∆푙 = L - Lo where: ∆푙 is the elongation (ft) L is the loaded length of the cable (ft) Lo is the unloaded (original) length of the cable (ft) 10-1 EN380 Naval Materials Science and Engineering Course Notes, U.S. Naval Academy Strain is the concept used to compare the elongation of a material to its original, undeformed length. Strain () is the quotient of elongation (e) and original length (L0). Engineering Strain has no units but is often given the units of in/in or ft/ft. ∆푙 휀 = 퐿 where: is the strain in the cable (ft/ft) ∆푙 is the elongation (ft) Lo is the unloaded (original) length of the cable (ft) Example Find the strain in a 75 foot cable experiencing an elongation of one inch. -

Impact of Flow Velocity on Surface Particulate Fouling - Theoretical Approach
Journal of American Science 2012;8(9) http://www.jofamericanscience.org Impact of Flow velocity on Surface Particulate Fouling - Theoretical Approach Mostafa M. Awad Mech. Power Eng. Dept., Faculty of Engineering, Mansoura University, Egypt [email protected] Abstract: The objective of this research is to study the effect of flow velocity on surface fouling. A new theoretical approach showing the effect of flow velocity on the particulate fouling has been developed. This approach is based on the basic fouling deposition and removal processes. The present results show that, the flow velocity has a strong effect on both the fouling rate and the asymptotic fouling factor; where the flow velocity affects both the deposition and removal processes. Increasing flow velocity results in decreasing both of the fouling rate and asymptotic values. Comparing the obtained theoretical results with available experimental ones showed good agreement between them. The developed model can be used as a very useful tool in the design and operation of the heat transfer equipment by controlling the parameters affecting fouling processes. [Mostafa M. Awad. Impact of Flow velocity on Surface Particulate Fouling - Theoretical Approach. J Am Sci 2012;8(9):442-449]. (ISSN: 1545-1003). http://www.jofamericanscience.org. 62 Keywords: Surface fouling, flow velocity, particle sticking, mass transfer. 1. Introduction increasing the flow velocity. They also found that the Fouling of heat transfer surface is defined as the asymptotic fouling factor is very sensitive to the flow accumulation of unwanted material on the heat transfer velocity especially at low flow velocities where this surface. This accumulation deteriorates the ability of sensitivity decreases with increasing flow velocity. -

On the Calculation of Propulsive Characteristics of a Bulk-Carrier Moving in Head Seas
Journal of Marine Science and Engineering Article On the Calculation of Propulsive Characteristics of a Bulk-Carrier Moving in Head Seas S. Polyzos and G. Tzabiras * School of Naval Architecture & Marine Engineering, National Technical University of Athens, 15780 Athens, Greece; [email protected] * Correspondence: tzab@fluid.mech.ntua.gr; Tel.: +30-210-772-1107 Received: 14 September 2020; Accepted: 8 October 2020; Published: 9 October 2020 Abstract: The present work describes a simplified Computational Fluid Dynamics (CFD) approach in order to calculate the propulsive performance of a ship moving at steady forward speed in head seas. The proposed method combines experimental data concerning the added resistance at model scale with full scale Reynolds Averages Navier–Stokes (RANS) computations, using an in-house solver. In order to simulate the propeller performance, the actuator disk concept is employed. The propeller thrust is calculated in the time domain, assuming that the total resistance of the ship is the sum of the still water resistance and the added component derived by the towing tank data. The unsteady RANS equations are solved until self-propulsion is achieved at a given time step. Then, the computed values of both the flow rate through the propeller and the thrust are stored and, after the end of the examined time period, they are processed for calculating the variation of Shaft Horsepower (SHP) and RPM of the ship’s engine. The method is applied for a bulk carrier which has been tested in model scale at the towing tank of the Laboratory for Ship and Marine Hydrodynamics (LSMH) of the National Technical University of Athens (NTUA). -

Ductile Brittle Transition
XIX. EVALUATION OF DUCTILE/BRITTLE FAILURE THEORY, DERIVATION OF THE DUCTILE/BRITTLE TRANSITION TEMPERATURE Introduction The ductile/brittle transition for failure with all of its implications and ramifications is one of the most widely observed and universally acknowledged physical effects in existence. Paradoxically though it also is one of the least understood of all the physical properties and physical effects that are encountered in the world of materials applications. Critical judgments are made on the basis of experience only, purely heuristic and intuitive. The resolution of the ductile/brittle transition into a physically meaningful and useful mathematical form has always been problematic and elusive. It often has been suggested that such a development is highly unlikely. The rigorous answer to this question remains and continues as one of the great scientific uncertainties, challenges. The long time operational status of ductile/brittle behavior has reduced to a statement of the strain at failure in uniaxial tension. If the strain at failure is large, the material is said to be ductile. If the strain at failure is small, it is brittle. Loose and uncertain though this is, it could be general, even complete, if the world were one-dimensional. But the physical world is three-dimensional and in stress space it is six or nine dimensional. Even more complicating, some of the stress components are algebraic. So the problem is large and difficult, perhaps immensely large and immensely difficult. To even begin to grapple with the ductile/brittle transition one must first have a firm grasp on a general and basic theory of failure. -

Little Book of Dynamic Buckling
. Little Book of Dynamic Buckling Herbert E. Lindberg September 2003 LCE Science/Software 1 Preface A graduate program in mechanics (often part of aero/astronautical, civil or mechanical engineering) generally includes a short series on elastic stability of structures. Within the confines of available time, focus is on stability under static loading, with dynamic loading from earthquakes, aerodynamics, impact and so on touched on only briefly except for students with thesis topics in these areas. This short book is intended as a brief introduction to dynamic buckling that can be covered in the limited time available in a broad graduate program. It is small and inexpensive enough that the student can own his or her own copy, rather than simply taking notes during lectures extracted by the teacher from the several full-size texts available on this topic, including one by the present author. The book introduces concepts of dynamic buckling in the simplest possible context for each phenomenon. The phenomena treated all fall under the definition of dynamic stability of structures under time-varying parametric loading. The goal is met by treating simple bars under axial loads, rings under lateral pulse loads, and cylindrical shells under radial and axial loads. The present document includes only a general introduction and then comprehensive presentation of theory and experimental data for bars under static and impact loads. Sections on rings and shells will be made available as orders are received. In all cases motion is precipitated by inevitable imperfections in structural shape. Sometimes these appear as a simple parameter, as in the eccentricity of impact. -
Load Line Length - Policy Clarification - Hullform Cut- Outs, Extensions and Steps
Maritime and Coastguard Agency LogMARINE GUIDANCE NOTE MGN 645 (M) Load Line Length - Policy Clarification - Hullform Cut- Outs, Extensions and Steps Notice to all Owners and builders of Small Commercial Vessels, Shipowners, Designers, Masters, Assigning Authorities and Surveyors This notice should be read with.. The Merchant Shipping (Load Line) Regulations 1998 - SI 1998 No.2241, as amended The Safety of Small Commercial Motor Vessels - A Code of Practice (Yellow Code) The Safety of Small Commercial Sailing Vessels - A Code of Practice (Blue Code) The Safety of Small Workboats and Pilot Boats - A Code of Practice (Brown Code) The Code of Practice for the Safety of Small Vessels in Commercial Use for Sport or Pleasure Operating from a Nominated Departure Point (Red Code) MGN280: Small Vessels in Commercial Use for Sport or Pleasure, Workboats and Pilot Boats - Alternative Construction Standards Summary This Note clarifies the UK policy when determining Load Line Length on vessel hullforms featuring cut-outs, removable end sections, or bathing platforms. 1. Foreword 1.1 This MGN relates to vessels with under 24m in Load Line Length, where the keel of which was laid on or after the date these regulations were implemented and were measured in accordance with the regulations in force at that time. 2. Introduction 2.1 Load Line Length (L) is used as a breakpoint for determining whether a vessel should comply with the requirements for either small vessels or large vessels. Identifying this size breakpoint is particularly important when the determination of the length of the vessel on the 85% waterline or identification of the point of least moulded depth is not straight forward due to particular design arrangements. -

2. Bulbous Bow Design and Construction Historical Origin
2. Bulbous Bow Design and Construction Ship Design I Manuel Ventura MSc in Marine Engineering and Naval Architecture Historical Origin • The bulbous bow was originated in the bow ram (esporão), a structure of military nature utilized in war ships on the end of the XIXth century, beginning of the XXth century. Bulbous Bow 2 1 Bulbous Bow • The bulbous bow was allegedly invented in the David Taylor Model Basin (DTMB) in the EUA Bulbous Bow 3 Introduction of the Bulbous Bows • The first bulbous bows appeared in the 1920s with the “Bremen” and the “Europa”, two German passenger ships built to operate in the North Atlantic. The “Bremen”, built in 1929, won the Blue Riband of the crossing of the Atlantic with the speed of 27.9 knots. • Other smaller passenger ships, such as the American “President Hoover” and “President Coolidge” of 1931, started to appear with bulbous bows although they were still considered as experimental, by ship owners and shipyards. • In 1935, the “Normandie”, built with a bulbous bow, attained the 30 knots. Bulbous Bow 4 2 Bulbous Bow in Japan • Some navy ships from WWII such as the cruiser “Yamato” (1940) used already bulbous bows • The systematic research started on the late 1950s • The “Yamashiro Maru”, built on 1963 at the Mitsubishi shipyard in Japan, was the first ship equipped with a bulbous bow. • The ship attained the speed of 20’ with 13.500 hp while similar ships needed 17.500 hp to reach the same speed. Bulbous Bow 5 Evolution of the Bulb • Diagram that relates the evolution of the application of bulbs as -

Ship Design Decision Support for a Carbon Dioxide Constrained Future
Ship Design Decision Support for a Carbon Dioxide Constrained Future John Nicholas Calleya A dissertation submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy of University College London. Department of Mechanical Engineering University College London 2014 2 I, John Calleya confirm that that the work submitted in this Thesis is my own. Where information has been derived from other sources I confirm that this has been indicated in the Thesis. Abstract The future may herald higher energy prices and greater regulation of shipping’s greenhouse gas emissions. Especially with the introduction of the Energy Efficiency Design Index (EEDI), tools are needed to assist engineers in selecting the best solutions to meet evolving requirements for reducing fuel consumption and associated carbon dioxide (CO2) emissions. To that end, a concept design tool, the Ship Impact Model (SIM), for quickly calculating the technical performance of a ship with different CO2 reducing technologies at an early design stage has been developed. The basis for this model is the calculation of changes from a known baseline ship and the consideration of profitability as the main incentive for ship owners or operators to invest in technologies that reduce CO2 emissions. The model and its interface with different technologies (including different energy sources) is flexible to different technology options; having been developed alongside technology reviews and design studies carried out by the partners in two different projects, “Low Carbon Shipping - A Systems Approach” majority funded by the RCUK energy programme and “Energy Technology Institute Heavy Duty Vehicle Efficiency - Marine” led by Rolls-Royce. -

Nautical Terms English Translated to Creole
Nautical Terms Translated English to Creole A Abaft Aryè Abeam Atraver Aboard Abò Adrift En derive Advection fog Bouya advection Aft Arrière Aground A tè Ahead De van Aids to navigation (ATON) Ed pou navigasyon Air draft Vent en lè a Air intake Rale lè a Air exhaust Sorti lè a Allision Abodaj Aloft Altitid Alternator Altènatè Amidship Mitan bato an Anchor Lank Anchorage area Zòn ancrage nan Anchor’s aweigh Derape lank nan Anchor bend (fisherman’s bend) Un tour mort et deux demi-cle (mare cord pecher poisson utilize) Anchor light Limyè lank Anchor rode Lank wouj Anchor well Lank byen Aneroid barometer Bawomèt aneroid Apparent wind Van aparan Astern Aryèr Athwartship A travè bato Attitude Atitid Automatic pilot Pilot otomatik Auxiliary engine Motè oksilyè B Back and drill Utilize pousse lateral helice lan pou manevrer bato an Backing plate Kontre plak Backing spring (line) Line pou remorkage Backstay Pataras Ballast Lèst Bar Barre Barge Peniche Barograph Barograf Barometer Baromèt Bathing ladder Echèl pou bin yin Batten Latte Batten down! Koinsez pano yo Batten pocket Poche ou gousset pou metez latte yo ladan Battery Batri Battery charger Chag batri Beacon Balis Beam Poto Beam reach Laje poto Bearing Relevman Bear off Pati lot bo Beating Remonte vent Beaufort wind scale Echel vent Beaufort Before the wind Avan vent Bell buoy Bouye ak kloche Below Anba Berth Plas a kouche Belt Kouroi Bilge Cale (kote tout dlo/liqid ranmase en ba bato an) Bilge alarm system System alarm pou cale Bilge drain Evakuation pou cale Bilge pump Pomp pou cale Bimini -

With Addendum) St
Annex A Inspection report (with addendum) St. Mary’s House Commercial Road Penryn, Falmouth Cornwall, TR10 8AG Marine Surveyors and Consulting Engineers Tel: +44 (0) 1326 375500 Fax: +44 (0) 1326 374777 http://www.rpearce.co.uk 23rd March 2012 THIS IS TO CERTIFY that at the request of the Marine Accident Investigation Branch (MAIB), Mountbatten House Grosvenor Square, Southampton, SO15 2JU, a survey was held on the wooden single screw fishing vessel “HEATHER ANNE” of the port of Fowey, FY126, GT 11.67, whilst shored up on the Queens Wharf in Falmouth Docks, Cornwall, for the purpose of assisting with an investigation following the vessels sinking on the 20th December 2011. BACKGROUND The vessel had been fishing for pilchards and was returning to port when at about 2213 hours on the 20th December 2011 she capsized and sank in Gerrans Bay. The incident was seen by the crew of the fishing vessel LAUREN KATE who raised the alarm and recovered the two man crew from the water. Sadly one of the crewmen died. VISITS TO VESSEL The undersigned visited the vessel on the following dates:- 27th February 2012 – Meet with representatives of the MAIB to discuss the survey of the vessel. 7th March 2012 – Attend the vessel in the company of a representative of the MAIB to conduct a survey in accordance with the instructions below. 8th March 2012 – Attend the vessel to obtain additional data for this report. 14th March 2012 – Attend the vessel in the company of the Salver to discuss sealing the hull in order to re- launch the vessel for a stability test. -

On Impact Testing of Subsize Charpy V-Notch Type Specimens*
DISCLAIMER This report was prepared as an account of work sponsored by an agency of the United States Government. Neither the United States Government nor any agency thereof, nor any of their employees, makes any warranty, express or implied, or assumes any legal liability or responsi• bility for the accuracy, completeness, or usefulness of any information, apparatus, product, or process disclosed, or represents that its use would not infringe privately owned rights. Refer• ence herein to any specific commercial product, process, or service by trade name, trademark, manufacturer, or otherwise does not necessarily constitute or imply its endorsement, recom• mendation, or favoring by the United States Government or any agency thereof. The views and opinions of authors expressed herein do not necessarily state or reflect those of the United States Government or any agency thereof. ON IMPACT TESTING OF SUBSIZE CHARPY V-NOTCH TYPE SPECIMENS* Mikhail A. Sokolov and Randy K. Nanstad Metals and Ceramics Division OAK RIDGE NATIONAL LABORATORY P.O. Box 2008 Oak Ridge, TN 37831-6151 •Research sponsored by the Office of Nuclear Regulatory Research, U.S. Nuclear Regulatory Commission, under Interagency Agreement DOE 1886-8109-8L with the U.S. Department of Energy under contract DE-AC05-84OR21400 with Lockheed Martin Energy Systems. The submitted manuscript has been authored by a contractor of the U.S. Government under contract No. DE-AC05-84OR21400. Accordingly, the U.S. Government retains a nonexclusive, royalty-free license to publish or reproduce the published form of this contribution, or allow others to do so, for U.S. Government purposes. Mikhail A. -
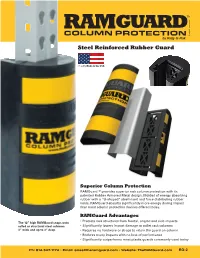
RAM Guard Column Protector
by Ridg-U-Rak Steel Reinforced Rubber Guard Superior Column Protection RAMGuard™ provides superior rack column protection with its patented Rubber Armored Metal design. Molded of energy absorbing rubber with a “U-shaped” steel insert and force distributing rubber voids, RAMGuard absorbs significantly more energy during impact than most column protection devices offered today. RAMGuard Advantages The 12” high RAMGuard snaps onto • Protects rack structures from frontal, angled and side impacts rolled or structural steel columns • Significantly lowers impact damage to pallet rack columns 3” wide and up to 3” deep. • Requires no hardware or straps to retain the guard on column • Endures many impacts with no loss of performance • Significantly outperforms most plastic guards commonly used today Ph: 814.347.1174 • Email: [email protected] • Website: TheRAMGuard.com RG-2 RAMGuard Design Maximum Impact Resistance by Design Molded of Energy There is a wide range of products designed to Absorbing Rubber help protect pallet rack columns from the everyday abuses that commonly occur in busy warehouse U-Shaped environments. These products include steel Steel Insert reinforced columns, slant-back or offset frames, floor-mounted steel guards, bumpers, barriers and after market attachable guards. Each of these serves a purpose for different applications. Aftermarket attachable guards have a variety of applications ranging from small plants with high traffic areas to large facilities where it is critical to reduce the time and cost of replacing damaged uprights… and everything in between. There are many types, kinds and sizes of guards on the market today, but none like the RAMGuard. After nearly two years of development, testing and proto-type designs, the new patented RAMGuard delivers the greatest impact resistance available in aftermarket snap-on or strap-on column guards.