On a New Generalized Integral Operator and Certain Operating Properties
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Definition of Riemann Integrals
The Definition and Existence of the Integral Definition of Riemann Integrals Definition (6.1) Let [a; b] be a given interval. By a partition P of [a; b] we mean a finite set of points x0; x1;:::; xn where a = x0 ≤ x1 ≤ · · · ≤ xn−1 ≤ xn = b We write ∆xi = xi − xi−1 for i = 1;::: n. The Definition and Existence of the Integral Definition of Riemann Integrals Definition (6.1) Now suppose f is a bounded real function defined on [a; b]. Corresponding to each partition P of [a; b] we put Mi = sup f (x)(xi−1 ≤ x ≤ xi ) mi = inf f (x)(xi−1 ≤ x ≤ xi ) k X U(P; f ) = Mi ∆xi i=1 k X L(P; f ) = mi ∆xi i=1 The Definition and Existence of the Integral Definition of Riemann Integrals Definition (6.1) We put Z b fdx = inf U(P; f ) a and we call this the upper Riemann integral of f . We also put Z b fdx = sup L(P; f ) a and we call this the lower Riemann integral of f . The Definition and Existence of the Integral Definition of Riemann Integrals Definition (6.1) If the upper and lower Riemann integrals are equal then we say f is Riemann-integrable on [a; b] and we write f 2 R. We denote the common value, which we call the Riemann integral of f on [a; b] as Z b Z b fdx or f (x)dx a a The Definition and Existence of the Integral Left and Right Riemann Integrals If f is bounded then there exists two numbers m and M such that m ≤ f (x) ≤ M if (a ≤ x ≤ b) Hence for every partition P we have m(b − a) ≤ L(P; f ) ≤ U(P; f ) ≤ M(b − a) and so L(P; f ) and U(P; f ) both form bounded sets (as P ranges over partitions). -

18.102 Introduction to Functional Analysis Spring 2009
MIT OpenCourseWare http://ocw.mit.edu 18.102 Introduction to Functional Analysis Spring 2009 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. 108 LECTURE NOTES FOR 18.102, SPRING 2009 Lecture 19. Thursday, April 16 I am heading towards the spectral theory of self-adjoint compact operators. This is rather similar to the spectral theory of self-adjoint matrices and has many useful applications. There is a very effective spectral theory of general bounded but self- adjoint operators but I do not expect to have time to do this. There is also a pretty satisfactory spectral theory of non-selfadjoint compact operators, which it is more likely I will get to. There is no satisfactory spectral theory for general non-compact and non-self-adjoint operators as you can easily see from examples (such as the shift operator). In some sense compact operators are ‘small’ and rather like finite rank operators. If you accept this, then you will want to say that an operator such as (19.1) Id −K; K 2 K(H) is ‘big’. We are quite interested in this operator because of spectral theory. To say that λ 2 C is an eigenvalue of K is to say that there is a non-trivial solution of (19.2) Ku − λu = 0 where non-trivial means other than than the solution u = 0 which always exists. If λ =6 0 we can divide by λ and we are looking for solutions of −1 (19.3) (Id −λ K)u = 0 −1 which is just (19.1) for another compact operator, namely λ K: What are properties of Id −K which migh show it to be ‘big? Here are three: Proposition 26. -

Curl, Divergence and Laplacian
Curl, Divergence and Laplacian What to know: 1. The definition of curl and it two properties, that is, theorem 1, and be able to predict qualitatively how the curl of a vector field behaves from a picture. 2. The definition of divergence and it two properties, that is, if div F~ 6= 0 then F~ can't be written as the curl of another field, and be able to tell a vector field of clearly nonzero,positive or negative divergence from the picture. 3. Know the definition of the Laplace operator 4. Know what kind of objects those operator take as input and what they give as output. The curl operator Let's look at two plots of vector fields: Figure 1: The vector field Figure 2: The vector field h−y; x; 0i: h1; 1; 0i We can observe that the second one looks like it is rotating around the z axis. We'd like to be able to predict this kind of behavior without having to look at a picture. We also promised to find a criterion that checks whether a vector field is conservative in R3. Both of those goals are accomplished using a tool called the curl operator, even though neither of those two properties is exactly obvious from the definition we'll give. Definition 1. Let F~ = hP; Q; Ri be a vector field in R3, where P , Q and R are continuously differentiable. We define the curl operator: @R @Q @P @R @Q @P curl F~ = − ~i + − ~j + − ~k: (1) @y @z @z @x @x @y Remarks: 1. -

Generalizations of the Riemann Integral: an Investigation of the Henstock Integral
Generalizations of the Riemann Integral: An Investigation of the Henstock Integral Jonathan Wells May 15, 2011 Abstract The Henstock integral, a generalization of the Riemann integral that makes use of the δ-fine tagged partition, is studied. We first consider Lebesgue’s Criterion for Riemann Integrability, which states that a func- tion is Riemann integrable if and only if it is bounded and continuous almost everywhere, before investigating several theoretical shortcomings of the Riemann integral. Despite the inverse relationship between integra- tion and differentiation given by the Fundamental Theorem of Calculus, we find that not every derivative is Riemann integrable. We also find that the strong condition of uniform convergence must be applied to guarantee that the limit of a sequence of Riemann integrable functions remains in- tegrable. However, by slightly altering the way that tagged partitions are formed, we are able to construct a definition for the integral that allows for the integration of a much wider class of functions. We investigate sev- eral properties of this generalized Riemann integral. We also demonstrate that every derivative is Henstock integrable, and that the much looser requirements of the Monotone Convergence Theorem guarantee that the limit of a sequence of Henstock integrable functions is integrable. This paper is written without the use of Lebesgue measure theory. Acknowledgements I would like to thank Professor Patrick Keef and Professor Russell Gordon for their advice and guidance through this project. I would also like to acknowledge Kathryn Barich and Kailey Bolles for their assistance in the editing process. Introduction As the workhorse of modern analysis, the integral is without question one of the most familiar pieces of the calculus sequence. -

Numerical Operator Calculus in Higher Dimensions
Numerical operator calculus in higher dimensions Gregory Beylkin* and Martin J. Mohlenkamp Applied Mathematics, University of Colorado, Boulder, CO 80309 Communicated by Ronald R. Coifman, Yale University, New Haven, CT, May 31, 2002 (received for review July 31, 2001) When an algorithm in dimension one is extended to dimension d, equation using only one-dimensional operations and thus avoid- in nearly every case its computational cost is taken to the power d. ing the exponential dependence on d. However, if the best This fundamental difficulty is the single greatest impediment to approximate solution of the form (Eq. 1) is not good enough, solving many important problems and has been dubbed the curse there is no way to improve the accuracy. of dimensionality. For numerical analysis in dimension d,we The natural extension of Eq. 1 is the form propose to use a representation for vectors and matrices that generalizes separation of variables while allowing controlled ac- r ͑ ͒ ϭ l ͑ ͒ l ͑ ͒ curacy. Basic linear algebra operations can be performed in this f x1,...,xd sl 1 x1 ··· d xd . [2] representation using one-dimensional operations, thus bypassing lϭ1 the exponential scaling with respect to the dimension. Although not all operators and algorithms may be compatible with this The key quantity in Eq. 2 is r, which we call the separation rank. representation, we believe that many of the most important ones By increasing r, the approximate solution can be made as are. We prove that the multiparticle Schro¨dinger operator, as well accurate as desired. -

Worked Examples on Using the Riemann Integral and the Fundamental of Calculus for Integration Over a Polygonal Element Sulaiman Abo Diab
Worked Examples on Using the Riemann Integral and the Fundamental of Calculus for Integration over a Polygonal Element Sulaiman Abo Diab To cite this version: Sulaiman Abo Diab. Worked Examples on Using the Riemann Integral and the Fundamental of Calculus for Integration over a Polygonal Element. 2019. hal-02306578v1 HAL Id: hal-02306578 https://hal.archives-ouvertes.fr/hal-02306578v1 Preprint submitted on 6 Oct 2019 (v1), last revised 5 Nov 2019 (v2) HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Worked Examples on Using the Riemann Integral and the Fundamental of Calculus for Integration over a Polygonal Element Sulaiman Abo Diab Faculty of Civil Engineering, Tishreen University, Lattakia, Syria [email protected] Abstracts: In this paper, the Riemann integral and the fundamental of calculus will be used to perform double integrals on polygonal domain surrounded by closed curves. In this context, the double integral with two variables over the domain is transformed into sequences of single integrals with one variable of its primitive. The sequence is arranged anti clockwise starting from the minimum value of the variable of integration. Finally, the integration over the closed curve of the domain is performed using only one variable. -
Lecture 15-16 : Riemann Integration Integration Is Concerned with the Problem of finding the Area of a Region Under a Curve
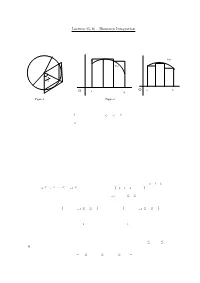
1 Lecture 15-16 : Riemann Integration Integration is concerned with the problem of ¯nding the area of a region under a curve. Let us start with a simple problem : Find the area A of the region enclosed by a circle of radius r. For an arbitrary n, consider the n equal inscribed and superscibed triangles as shown in Figure 1. f(x) f(x) π 2 n O a b O a b Figure 1 Figure 2 Since A is between the total areas of the inscribed and superscribed triangles, we have nr2sin(¼=n)cos(¼=n) · A · nr2tan(¼=n): By sandwich theorem, A = ¼r2: We will use this idea to de¯ne and evaluate the area of the region under a graph of a function. Suppose f is a non-negative function de¯ned on the interval [a; b]: We ¯rst subdivide the interval into a ¯nite number of subintervals. Then we squeeze the area of the region under the graph of f between the areas of the inscribed and superscribed rectangles constructed over the subintervals as shown in Figure 2. If the total areas of the inscribed and superscribed rectangles converge to the same limit as we make the partition of [a; b] ¯ner and ¯ner then the area of the region under the graph of f can be de¯ned as this limit and f is said to be integrable. Let us de¯ne whatever has been explained above formally. The Riemann Integral Let [a; b] be a given interval. A partition P of [a; b] is a ¯nite set of points x0; x1; x2; : : : ; xn such that a = x0 · x1 · ¢ ¢ ¢ · xn¡1 · xn = b. -

23. Kernel, Rank, Range
23. Kernel, Rank, Range We now study linear transformations in more detail. First, we establish some important vocabulary. The range of a linear transformation f : V ! W is the set of vectors the linear transformation maps to. This set is also often called the image of f, written ran(f) = Im(f) = L(V ) = fL(v)jv 2 V g ⊂ W: The domain of a linear transformation is often called the pre-image of f. We can also talk about the pre-image of any subset of vectors U 2 W : L−1(U) = fv 2 V jL(v) 2 Ug ⊂ V: A linear transformation f is one-to-one if for any x 6= y 2 V , f(x) 6= f(y). In other words, different vector in V always map to different vectors in W . One-to-one transformations are also known as injective transformations. Notice that injectivity is a condition on the pre-image of f. A linear transformation f is onto if for every w 2 W , there exists an x 2 V such that f(x) = w. In other words, every vector in W is the image of some vector in V . An onto transformation is also known as an surjective transformation. Notice that surjectivity is a condition on the image of f. 1 Suppose L : V ! W is not injective. Then we can find v1 6= v2 such that Lv1 = Lv2. Then v1 − v2 6= 0, but L(v1 − v2) = 0: Definition Let L : V ! W be a linear transformation. The set of all vectors v such that Lv = 0W is called the kernel of L: ker L = fv 2 V jLv = 0g: 1 The notions of one-to-one and onto can be generalized to arbitrary functions on sets. -

October 7, 2015 1 Adjoint of a Linear Transformation
Mathematical Toolkit Autumn 2015 Lecture 4: October 7, 2015 Lecturer: Madhur Tulsiani The following is an extremely useful inequality. Prove it for a general inner product space (not neccessarily finite dimensional). Exercise 0.1 (Cauchy-Schwarz-Bunyakowsky inequality) Let u; v be any two vectors in an inner product space V . Then jhu; vij2 ≤ hu; ui · hv; vi Let V be a finite dimensional inner product space and let fw1; : : : ; wng be an orthonormal basis for P V . Then for any v 2 V , there exist c1; : : : ; cn 2 F such that v = i ci · wi. The coefficients ci are often called Fourier coefficients. Using the orthonormality and the properties of the inner product, we get ci = hv; wii. This can be used to prove the following Proposition 0.2 (Parseval's identity) Let V be a finite dimensional inner product space and let fw1; : : : ; wng be an orthonormal basis for V . Then, for any u; v 2 V n X hu; vi = hu; wii · hv; wii : i=1 1 Adjoint of a linear transformation Definition 1.1 Let V; W be inner product spaces over the same field F and let ' : V ! W be a linear transformation. A transformation '∗ : W ! V is called an adjoint of ' if h'(v); wi = hv; '∗(w)i 8v 2 V; w 2 W: n Pn Example 1.2 Let V = W = C with the inner product hu; vi = i=1 ui · vi. Let ' : V ! V be represented by the matrix A. Then '∗ is represented by the matrix AT . Exercise 1.3 Let 'left : Fib ! Fib be the left shift operator as before, and let hf; gi for f; g 2 Fib P1 f(n)g(n) ∗ be defined as hf; gi = n=0 Cn for C > 4. -

Intuitive Mathematical Discourse About the Complex Path Integral Erik Hanke
Intuitive mathematical discourse about the complex path integral Erik Hanke To cite this version: Erik Hanke. Intuitive mathematical discourse about the complex path integral. INDRUM 2020, Université de Carthage, Université de Montpellier, Sep 2020, Cyberspace (virtually from Bizerte), Tunisia. hal-03113845 HAL Id: hal-03113845 https://hal.archives-ouvertes.fr/hal-03113845 Submitted on 18 Jan 2021 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Intuitive mathematical discourse about the complex path integral Erik Hanke1 1University of Bremen, Faculty of Mathematics and Computer Science, Germany, [email protected] Interpretations of the complex path integral are presented as a result from a multi-case study on mathematicians’ intuitive understanding of basic notions in complex analysis. The first case shows difficulties of transferring the image of the integral in real analysis as an oriented area to the complex setting, and the second highlights the complex path integral as a tool in complex analysis with formal analogies to path integrals in multivariable calculus. These interpretations are characterised as a type of intuitive mathematical discourse and the examples are analysed from the point of view of substantiation of narratives within the commognitive framework. -

General Riemann Integrals and Their Computation Via Domain
Louisiana State University LSU Digital Commons LSU Historical Dissertations and Theses Graduate School 1999 General Riemann Integrals and Their omputC ation via Domain. Bin Lu Louisiana State University and Agricultural & Mechanical College Follow this and additional works at: https://digitalcommons.lsu.edu/gradschool_disstheses Recommended Citation Lu, Bin, "General Riemann Integrals and Their omputC ation via Domain." (1999). LSU Historical Dissertations and Theses. 7001. https://digitalcommons.lsu.edu/gradschool_disstheses/7001 This Dissertation is brought to you for free and open access by the Graduate School at LSU Digital Commons. It has been accepted for inclusion in LSU Historical Dissertations and Theses by an authorized administrator of LSU Digital Commons. For more information, please contact [email protected]. INFORMATION TO USERS This manuscript has been reproduced from the microfilm master. UMI films the text directly from the original or copy submitted. Thus, some thesis and dissertation copies are in typewriter face, while others may be from any type of computer printer. The quality of this reproduction is dependent upon the quality of the copy submitted. Broken or indistinct print, colored or poor quality illustrations and photographs, phnt bleedthrough, substandard margins, and improper alignment can adversely affect reproduction. In the unlikely event that the author did not send UMI a complete manuscript and there are missing pages, these will be noted. Also, if unauthorized copyright material had to be removed, a note will indicate the deletion. Oversize materials (e.g., maps, drawings, charts) are reproduced by sectioning the original, beginning at the upper left-hand comer and continuing from left to right in equal sections with small overlaps. -

Operator Calculus
Pacific Journal of Mathematics OPERATOR CALCULUS PHILIP JOEL FEINSILVER Vol. 78, No. 1 March 1978 PACIFIC JOURNAL OF MATHEMATICS Vol. 78, No. 1, 1978 OPERATOR CALCULUS PHILIP FEINSILVER To an analytic function L(z) we associate the differential operator L(D), D denoting differentiation with respect to a real variable x. We interpret L as the generator of a pro- cess with independent increments having exponential mar- tingale m(x(t), t)= exp (zx(t) — tL{z)). Observing that m(x, —t)—ezCl where C—etLxe~tL, we study the operator calculus for C and an associated generalization of the operator xD, A—CD. We find what functions / have the property n that un~C f satisfy the evolution equation ut~Lu and the eigenvalue equations Aun—nun, thus generalizing the powers xn. We consider processes on RN as well as R1 and discuss various examples and extensions of the theory. In the case that L generates a Markov semigroup, we have transparent probabilistic interpretations. In case L may not gene- rate a probability semigroup, the general theory gives some insight into what properties any associated "processes with independent increments" should have. That is, the purpose is to elucidate the Markov case but in such a way that hopefully will lead to practi- cable definitions and will present useful ideas for defining more general processes—involving, say, signed and/or singular measures. IL Probabilistic basis. Let pt(%} be the transition kernel for a process p(t) with stationary independent increments. That is, ί pί(a?) = The Levy-Khinchine formula says that, generally: tξ tL{ίξ) e 'pt(x) = e R where L(ίξ) = aiξ - σψ/2 + [ eiξu - 1 - iζη(u)-M(du) with jΛ-fO} u% η(u) = u(\u\ ^ 1) + sgn^(M ^ 1) and ί 2M(du)< <*> .