Chapter 14 Frequency Response
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

LABORATORY 3: Transient Circuits, RC, RL Step Responses, 2Nd Order Circuits
Alpha Laboratories ECSE-2010 LABORATORY 3: Transient circuits, RC, RL step responses, 2nd Order Circuits Note: If your partner is no longer in the class, please talk to the instructor. Material covered: RC circuits Integrators Differentiators 1st order RC, RL Circuits 2nd order RLC series, parallel circuits Thevenin circuits Part A: Transient Circuits RC Time constants: A time constant is the time it takes a circuit characteristic (Voltage for example) to change from one state to another state. In a simple RC circuit where the resistor and capacitor are in series, the RC time constant is defined as the time it takes the voltage across a capacitor to reach 63.2% of its final value when charging (or 36.8% of its initial value when discharging). It is assume a step function (Heavyside function) is applied as the source. The time constant is defined by the equation τ = RC where τ is the time constant in seconds R is the resistance in Ohms C is the capacitance in Farads The following figure illustrates the time constant for a square pulse when the capacitor is charging and discharging during the appropriate parts of the input signal. You will see a similar plot in the lab. Note the charge (63.2%) and discharge voltages (36.8%) after one time constant, respectively. Written by J. Braunstein Modified by S. Sawyer Spring 2020: 1/26/2020 Rensselaer Polytechnic Institute Troy, New York, USA 1 Alpha Laboratories ECSE-2010 Written by J. Braunstein Modified by S. Sawyer Spring 2020: 1/26/2020 Rensselaer Polytechnic Institute Troy, New York, USA 2 Alpha Laboratories ECSE-2010 Discovery Board: For most of the remaining class, you will want to compare input and output voltage time varying signals. -

Phasor Analysis of Circuits
Phasor Analysis of Circuits Concepts Frequency-domain analysis of a circuit is useful in understanding how a single-frequency wave undergoes an amplitude change and phase shift upon passage through the circuit. The concept of impedance or reactance is central to frequency-domain analysis. For a resistor, the impedance is Z ω = R , a real quantity independent of frequency. For capacitors and R ( ) inductors, the impedances are Z ω = − i ωC and Z ω = iω L. In the complex plane C ( ) L ( ) these impedances are represented as the phasors shown below. Im ivL R Re -i/vC These phasors are useful because the voltage across each circuit element is related to the current through the equation V = I Z . For a series circuit where the same current flows through each element, the voltages across each element are proportional to the impedance across that element. Phasor Analysis of the RC Circuit R V V in Z in Vout R C V ZC out The behavior of this RC circuit can be analyzed by treating it as the voltage divider shown at right. The output voltage is then V Z −i ωC out = C = . V Z Z i C R in C + R − ω + The amplitude is then V −i 1 1 out = = = , V −i +ω RC 1+ iω ω 2 in c 1+ ω ω ( c ) 1 where we have defined the corner, or 3dB, frequency as 1 ω = . c RC The phasor picture is useful to determine the phase shift and also to verify low and high frequency behavior. The input voltage is across both the resistor and the capacitor, so it is equal to the vector sum of the resistor and capacitor voltages, while the output voltage is only the voltage across capacitor. -
Network Analysis
LECTURE NOTES ON NETWORK ANALYSIS B. Tech III Semester (IARE-R18) Ms. S Swathi Asistant professor ELECTRICAL AND ELECTRONICS ENGINEERING INSTITUTE OF AERONAUTICAL ENGINEERING (Autonomous) DUNDIGAL, HYDERABAD - 50043 1 SYLLABUS MODULE-I NETWORK THEOREMS (DC AND AC) Network Theorems: Tellegen‘s, superposition, reciprocity, Thevenin‘s, Norton‘s, maximum power transfer, Milliman‘s and compensation theorems for DC and AC excitations, numerical problems. MODULE-II SOLUTION OF FIRST AND SECOND ORDER NETWORKS Transient response: Initial conditions, transient response of RL, RC and RLC series and parallel circuits with DC and AC excitations, differential equation and Laplace transform approach. MODULE-III LOCUS DIAGRAMS AND NETWORKS FUNCTIONS Locus diagrams: Locus diagrams of RL, RC, RLC circuits. Network Functions: The concept of complex frequency, physical interpretation, transform impedance, series and parallel combination of elements, terminal ports, network functions for one port and two port networks, poles and zeros of network functions, significance of poles and zeros, properties of driving point functions and transfer functions, necessary conditions for driving point functions and transfer functions, time domain response from pole-zero plot. MODULE-IV TWO PORTNETWORK PARAMETERS Two port network parameters: Z, Y, ABCD, hybrid and inverse hybrid parameters, conditions for symmetry and reciprocity, inter relationships of different parameters, interconnection (series, parallel and cascade) of two port networks, image parameters. MODULE-V FILTERS Filters: Classification of filters, filter networks, classification of pass band and stop band, characteristic impedance in the pass and stop bands, constant-k low pass filter, high pass filter, m- derived T-section, band pass filter and band elimination filter. Text Books: 1. -

33. RLC Parallel Circuit. Resonant Ac Circuits
University of Rhode Island DigitalCommons@URI PHY 204: Elementary Physics II -- Lecture Notes PHY 204: Elementary Physics II (2021) 12-4-2020 33. RLC parallel circuit. Resonant ac circuits Gerhard Müller University of Rhode Island, [email protected] Robert Coyne University of Rhode Island, [email protected] Follow this and additional works at: https://digitalcommons.uri.edu/phy204-lecturenotes Recommended Citation Müller, Gerhard and Coyne, Robert, "33. RLC parallel circuit. Resonant ac circuits" (2020). PHY 204: Elementary Physics II -- Lecture Notes. Paper 33. https://digitalcommons.uri.edu/phy204-lecturenotes/33https://digitalcommons.uri.edu/ phy204-lecturenotes/33 This Course Material is brought to you for free and open access by the PHY 204: Elementary Physics II (2021) at DigitalCommons@URI. It has been accepted for inclusion in PHY 204: Elementary Physics II -- Lecture Notes by an authorized administrator of DigitalCommons@URI. For more information, please contact [email protected]. PHY204 Lecture 33 [rln33] AC Circuit Application (2) In this RLC circuit, we know the voltage amplitudes VR, VC, VL across each device, the current amplitude Imax = 5A, and the angular frequency ω = 2rad/s. • Find the device properties R, C, L and the voltage amplitude of the ac source. Emax ~ εmax A R C L V V V 50V 25V 25V tsl305 We pick up the thread from the previous lecture with the quantitative anal- ysis of another RLC series circuit. Here our reasoning must be in reverse direction compared to that on the last page of lecture 32. Given the -

Experiment 12: AC Circuits - RLC Circuit
Experiment 12: AC Circuits - RLC Circuit Introduction An inductor (L) is an important component of circuits, on the same level as resistors (R) and capacitors (C). The inductor is based on the principle of inductance - that moving charges create a magnetic field (the reverse is also true - a moving magnetic field creates an electric field). Inductors can be used to produce a desired magnetic field and store energy in its magnetic field, similar to capacitors being used to produce electric fields and storing energy in their electric field. At its simplest level, an inductor consists of a coil of wire in a circuit. The circuit symbol for an inductor is shown in Figure 1a. So far we observed that in an RC circuit the charge, current, and potential difference grew and decayed exponentially described by a time constant τ. If an inductor and a capacitor are connected in series in a circuit, the charge, current and potential difference do not grow/decay exponentially, but instead oscillate sinusoidally. In an ideal setting (no internal resistance) these oscillations will continue indefinitely with a period (T) and an angular frequency ! given by 1 ! = p (1) LC This is referred to as the circuit's natural angular frequency. A circuit containing a resistor, a capacitor, and an inductor is called an RLC circuit (or LCR), as shown in Figure 1b. With a resistor present, the total electromagnetic energy is no longer constant since energy is lost via Joule heating in the resistor. The oscillations of charge, current and potential are now continuously decreasing with amplitude. -
ELECTRICAL CIRCUIT ANALYSIS Lecture Notes
ELECTRICAL CIRCUIT ANALYSIS Lecture Notes (2020-21) Prepared By S.RAKESH Assistant Professor, Department of EEE Department of Electrical & Electronics Engineering Malla Reddy College of Engineering & Technology Maisammaguda, Dhullapally, Secunderabad-500100 B.Tech (EEE) R-18 MALLA REDDY COLLEGE OF ENGINEERING AND TECHNOLOGY II Year B.Tech EEE-I Sem L T/P/D C 3 -/-/- 3 (R18A0206) ELECTRICAL CIRCUIT ANALYSIS COURSE OBJECTIVES: This course introduces the analysis of transients in electrical systems, to understand three phase circuits, to evaluate network parameters of given electrical network, to draw the locus diagrams and to know about the networkfunctions To prepare the students to have a basic knowledge in the analysis of ElectricNetworks UNIT-I D.C TRANSIENT ANALYSIS: Transient response of R-L, R-C, R-L-C circuits (Series and parallel combinations) for D.C. excitations, Initial conditions, Solution using differential equation and Laplace transform method. UNIT - II A.C TRANSIENT ANALYSIS: Transient response of R-L, R-C, R-L-C Series circuits for sinusoidal excitations, Initial conditions, Solution using differential equation and Laplace transform method. UNIT - III THREE PHASE CIRCUITS: Phase sequence, Star and delta connection, Relation between line and phase voltages and currents in balanced systems, Analysis of balanced and Unbalanced three phase circuits UNIT – IV LOCUS DIAGRAMS & RESONANCE: Series and Parallel combination of R-L, R-C and R-L-C circuits with variation of various parameters.Resonance for series and parallel circuits, concept of band width and Q factor. UNIT - V NETWORK PARAMETERS:Two port network parameters – Z,Y, ABCD and hybrid parameters.Condition for reciprocity and symmetry.Conversion of one parameter to other, Interconnection of Two port networks in series, parallel and cascaded configuration and image parameters. -

Lecture 4: RLC Circuits and Resonant Circuits
Lecture 4: R-L-C Circuits and Resonant Circuits RLC series circuit: ● What's VR? ◆ Simplest way to solve for V is to use voltage divider equation in complex notation: V R X L X C V = in R R + XC + XL L C R Vin R = Vin = V0 cosω t 1 R + + jωL jωC ◆ Using complex notation for the apply voltage V = V cosωt = Real(V e jωt ): j t in 0 0 V e ω R V = 0 R $ 1 ' € R + j& ωL − ) % ωC ( ■ We are interested in the both the magnitude of VR and its phase with respect to Vin. ■ First the magnitude: jωt V0e R € V = R $ 1 ' R + j& ωL − ) % ωC ( V R = 0 2 2 $ 1 ' R +& ωL − ) % ωC ( K.K. Gan L4: RLC and Resonance Circuits 1 € ■ The phase of VR with respect to Vin can be found by writing VR in purely polar notation. ❑ For the denominator we have: 0 * 1 -4 2 ωL − $ 1 ' 2 $ 1 ' 2 1, /2 R + j& ωL − ) = R +& ωL − ) exp1 j tan− ωC 5 % C ( % C( , R / ω ω 2 , /2 3 + .6 ❑ Define the phase angle φ : Imaginary X tanφ = Real X € 1 ωL − = ωC R ❑ We can now write for VR in complex form: V R e jωt V = o R 2 € jφ 2 % 1 ( e R +' ωL − * Depending on L, C, and ω, the phase angle can be & ωC) positive or negative! In this example, if ωL > 1/ωC, j(ωt−φ) then VR(t) lags Vin(t). = VR e ■ Finally, we can write down the solution for V by taking the real part of the above equation: j(ωt−φ) V R e V R cos(ωt −φ) V = Real 0 = 0 R 2 2 € 2 % 1 ( 2 % 1 ( R +' ωL − * R +' ωL − * & ωC ) & ωC ) K.K. -
How to Design Analog Filter Circuits.Pdf
a b FIG. 1-TWO LOWPASS FILTERS. Even though the filters use different components, they perform in a similiar fashion. MANNlE HOROWITZ Because almost every analog circuit contains some filters, understandinghow to work with them is important. Here we'll discuss the basics of both active and passive types. THE MAIN PURPOSE OF AN ANALOG FILTER In addition to bandpass and band- age (because inductors can be expensive circuit is to either pass or reject signals rejection filters, circuits can be designed and hard to find); they are generally easier based on their frequency. There are many to only pass frequencies that are either to tune; they can provide gain (and thus types of frequency-selective filter cir- above or below a certain cutoff frequency. they do not necessarily have any insertion cuits; their action can usually be de- If the circuit passes only frequencies that loss); they have a high input impedance, termined from their names. For example, are below the cutoff, the circuit is called a and have a low output impedance. a band-rejection filter will pass all fre- lo~~passfilter, while a circuit that passes A filter can be in a circuit with active quencies except those in a specific band. those frequencies above the cutoff is a devices and still not be an active filter. Consider what happens if a parallel re- higlzpass filter. For example, if a resonant circuit is con- sonant circuit is connected in series with a All of the different filters fall into one . nected in series with two active devices signal source. -
Lecture 14 - AC Circuits, Resonance Y&F Chapter 31, Sec
Physics 121 - Electricity and Magnetism Lecture 14 - AC Circuits, Resonance Y&F Chapter 31, Sec. 3 - 8 • The Series RLC Circuit. Amplitude and Phase Relations • Phasor Diagrams for Voltage and Current • Impedance and Phasors for Impedance • Resonance • Power in AC Circuits, Power Factor • Examples • Transformers • Summaries Copyright R. Janow – Fall 2013 Current & voltage phases in pure R, C, and L circuits Current is the same everywhere in a single branch (including phase) Phases of voltages in elements are referenced to the current phasor • Apply sinusoidal voltage E (t) = EmCos(wDt) • For pure R, L, or C loads, phase angles are 0, +p/2, -p/2 • Reactance” means ratio of peak voltage to peak current (generalized resistances). VR& iR in phase VC lags iC by p/2 VL leads iL by p/2 Resistance Capacitive Reactance Inductive Reactance 1 V /i R Vmax /iC C Vmax /iL L wDL max R wDC Copyright R. Janow – Fall 2013 The impedance is the ratio of peak EMF to peak current peak applied voltage Em Z [Z] ohms peak current that flows im 2 2 2 Magnitude of Em: Em VR (VL VC) 1 Reactances: L wDL C wDC L VL /iL C VC /iC R VR /iR im iR,max iL,max iC,max For series LRC circuit, divide Em by peak current 2 2 1/2 Applies to a single Magnitude of Z: Z [ R (L C) ] branch with L, C, R VL VC L C Phase angle F: tan(F) see diagram VR R F measures the power absorbed by the circuit: P Em im Em im cos(F) • R ~ 0 tiny losses, no power absorbed im normal to Em F ~ +/- p/2 • XL=XC im parallel to Em F 0 Z=R maximum currentCopyright (resonance) R. -

AC Power • Resonant Circuits • Phasors (2-Dim Vectors, Amplitude and Phase) What Is Reactance ? You Can Think of It As a Frequency-Dependent Resistance
Physics-272 Lecture 20 • AC Power • Resonant Circuits • Phasors (2-dim vectors, amplitude and phase) What is reactance ? You can think of it as a frequency-dependent resistance. 1 For high ω, χ ~0 X = C C ωC - Capacitor looks like a wire (“short”) For low ω, χC∞ - Capacitor looks like a break For low ω, χL~0 - Inductor looks like a wire (“short”) XL = ω L For high ω, χL∞ - Inductor looks like a break (inductors resist change in current) ("XR "= R ) An RL circuit is driven by an AC generator as shown in the figure. For what driving frequency ω of the generator, will the current through the resistor be largest a) ω large b) ω small c) independent of driving freq. The current amplitude is inversely proportional to the frequency of the ω generator. (X L= L) Alternating Currents: LRC circuit Figure (b) has XL>X C and (c) has XL<X C . Using Phasors, we can construct the phasor diagram for an LRC Circuit. This is similar to 2-D vector addition. We add the phasors of the resistor, the inductor, and the capacitor. The inductor phasor is +90 and the capacitor phasor is -90 relative to the resistor phasor. Adding the three phasors vectorially, yields the voltage sum of the resistor, inductor, and capacitor, which must be the same as the voltage of the AC source. Kirchoff’s voltage law holds for AC circuits. Also V R and I are in phase. Phasors R ε ω Problem : Given Vdrive = m sin( t), C L find VR, VL, VC, IR, IL, IC ε ∼ Strategy : We will use Kirchhoff’s voltage law that the (phasor) sum of the voltages VR, VC, and VL must equal Vdrive . -
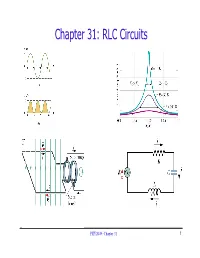
Chapter 31: RLC Circuits
Chapter 31: RLC Circuits PHY2049: Chapter 31 1 Topics ÎLC Oscillations Conservation of energy ÎDamped oscillations in RLC circuits Energy loss ÎAC current RMS quantities ÎForced oscillations Resistance, reactance, impedance Phase shift Resonant frequency Power ÎTransformers Impedance matching PHY2049: Chapter 31 2 LC Oscillations ÎWork out equation for LC circuit (loop rule) qdi C −−L =0 L Cdt ÎRewrite using i = dq/dt dq22 q dq 1 Lq+=⇒00 +ω 2 = ω = dt22C dt LC ω (angular frequency) has dimensions of 1/t ÎIdentical to equation of mass on spring dx22 dx k mkx+=⇒00 +ω 2 x = ω = dt22 dt m PHY2049: Chapter 31 3 LC Oscillations (2) ÎSolution is same as mass on spring ⇒ oscillations k qq=+max cos()ω tθ ω = m qmax is the maximum charge on capacitor θ is an unknown phase (depends on initial conditions) ÎCalculate current: i = dq/dt iq=−ω maxsin(ωθ t +) =− i max sin( ωθ t + ) ÎThus both charge and current oscillate Angular frequency ω, frequency f = ω/2π Period: T = 2π/ω PHY2049: Chapter 31 4 Plot Charge and Current vs t ω =12T = π qt( ) it( ) PHY2049: Chapter 31 5 Energy Oscillations ÎTotal energy in circuit is conserved. Let’s see why di q L +=0 Equation of LC circuit dt C di q dq Li+=0 Multiply by i = dq/dt dt C dt 2 Ld221 d dx dx iq+=0 Use = 2x 22dt( ) C dt ( ) dt dt 2 2 dq⎛⎞ 112 q 11Li2 +=0 Li +=const ⎜⎟22 22C dt⎝⎠ C UL + UC = const PHY2049: Chapter 31 6 Oscillation of Energies ÎEnergies can be written as (using ω2 = 1/LC) 2 2 q q 2 Ut==max cos ()ω +θ C 22CC 2 2222q 2 ULiLq==11ω sin()ωθ t +=max sin () ωθ t + L 22max 2C q2 ÎConservation -
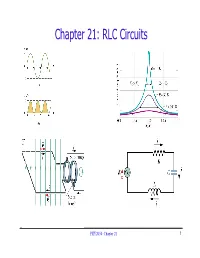
Chapter 21: RLC Circuits
Chapter 21: RLC Circuits PHY2054: Chapter 21 1 Voltage and Current in RLC Circuits ÎAC emf source: “driving frequency” f ε = εωm sin t ω = 2π f ÎIf circuit contains only R + emf source, current is simple ε ε iI==sin()ω tI =m () current amplitude R mmR ÎIf L and/or C present, current is not in phase with emf ε iI=−=sin()ωφ t I m mmZ ÎZ, φ shown later PHY2054: Chapter 21 2 AC Source and Resistor Only ÎDriving voltage is ε = εωm sin t i ÎRelation of current and voltage iR= ε / ε ~ R ε iI==sinω tI m mmR Current is in phase with voltage (φ = 0) PHY2054: Chapter 21 3 AC Source and Capacitor Only q ÎVoltage is vt==ε sinω CmC ÎDifferentiate to find current i qC= εm sinω t idqdtCV==/cosω C ω t ε ~ C ÎRewrite using phase (check this!) iCVt=+°ω C sin()ω 90 ÎRelation of current and voltage εm iI=+°=mmsin()ω t 90 I ( XC =1/ωC) XC ΓCapacitive reactance”: XCC =1/ω Current “leads” voltage by 90° PHY2054: Chapter 21 4 AC Source and Inductor Only ÎVoltage is vLm== Ldi/sin dtε ω t ÎIntegrate di/dt to find current: i di//sin dt= ()εm Lω t iLt=−()εm /cosωω ε ~ L ÎRewrite using phase (check this!) iLt=−°()εm /sin90ωω( ) ÎRelation of current and voltage εm iI=−°=mmsin()ω t 90 I ( XLL = ω ) X L ΓInductive reactance”: XLL = ω Current “lags” voltage by 90° PHY2054: Chapter 21 5 General Solution for RLC Circuit ÎWe assume steady state solution of form iI= m sin(ω t−φ ) Im is current amplitude φ is phase by which current “lags” the driving EMF Must determine Im and φ ÎPlug in solution: differentiate & integrate sin(ωt-φ) iI=−m sin()ω tφ di Substitute di q