Dynamic Wireless Charging of Autonomous Vehicles
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Nikola Tesla
Nikola Tesla Nikola Tesla Tesla c. 1896 10 July 1856 Born Smiljan, Austrian Empire (modern-day Croatia) 7 January 1943 (aged 86) Died New York City, United States Nikola Tesla Museum, Belgrade, Resting place Serbia Austrian (1856–1891) Citizenship American (1891–1943) Graz University of Technology Education (dropped out) ‹ The template below (Infobox engineering career) is being considered for merging. See templates for discussion to help reach a consensus. › Engineering career Electrical engineering, Discipline Mechanical engineering Alternating current Projects high-voltage, high-frequency power experiments [show] Significant design o [show] Awards o Signature Nikola Tesla (/ˈtɛslə/;[2] Serbo-Croatian: [nǐkola têsla]; Cyrillic: Никола Тесла;[a] 10 July 1856 – 7 January 1943) was a Serbian-American[4][5][6] inventor, electrical engineer, mechanical engineer, and futurist who is best known for his contributions to the design of the modern alternating current (AC) electricity supply system.[7] Born and raised in the Austrian Empire, Tesla studied engineering and physics in the 1870s without receiving a degree, and gained practical experience in the early 1880s working in telephony and at Continental Edison in the new electric power industry. He emigrated in 1884 to the United States, where he became a naturalized citizen. He worked for a short time at the Edison Machine Works in New York City before he struck out on his own. With the help of partners to finance and market his ideas, Tesla set up laboratories and companies in New York to develop a range of electrical and mechanical devices. His alternating current (AC) induction motor and related polyphase AC patents, licensed by Westinghouse Electric in 1888, earned him a considerable amount of money and became the cornerstone of the polyphase system which that company eventually marketed. -

Radio Control System
Radio Control System The Radio Control System consists of the control transmitter unit held by the operator and the receiver with its associated components in the robot. The Radio Control Transmitter converts movements of the control sticks and switches into a coded radio signal, which is transmitted by radio to the Radio Control Receiver within the robot. The signal is received and then decoded by the micro-controller, which is on the main circuit board in the robot. The micro-controller controls functions based on what was sent from the radio control transmitter. RADIO CONTROL OPERATING INSTRUCTIONS Refer to the diagram showing the radio control transmitter for the location of controls. Check all of the trim adjustments on the transmitter and make sure they are in their center position. Extend the Radio Control Transmitter Antenna 1/4 to 1/2 way. Turn the Radio Control Transmitter on first and then turn on the main robot power switch. It is necessary for the robot to always have an operating signal when it is on, if there is no signal you will not have full control of the robot. The right hand joystick controls movement of the robot's drive wheels. Pushing the stick forward will cause the robot to move forward. Pulling the stick back will cause the robot to move backward. Moving the stick to the right or left will cause the robot to turn to the right or left respectively. Movement is fully proportional so any variation or combination of movement is possible. The horizontal and vertical trim tabs to the left and below the joystick are for centering and should be adjusted periodically. -
Benjamin, Nikola, & Walter: Geniuses Who Maximized Their Creative
Benjamin, Nikola, & Walter: Geniuses Who Maximized Their Creative Energies By Jonathan V. L. Kiser August 2019 Benjamin, Nikola, & Walter: Geniuses Who Maximized Their Creative Energies Table of Contents Section Page # Overview 1 Exhibit 1 – Ben, Nikola & Walter’s First 10 Years 2 Exhibit 2 – Ben, Nikola & Walter Years 11 Through 19 4 Exhibit 3 – Ben, Nikola & Walter’s 20s 7 Exhibit 4 – Ben, Nikola & Walter’s 30s 13 Exhibit 5 – Ben, Nikola & Walter’s 40s 19 Exhibit 6 – Ben, Nikola & Walter’s 50s 25 Exhibit 7 – Ben, Nikola & Walter’s 60s 29 Exhibit 8 – Ben, Nikola & Walter’s 70s 33 Exhibit 9 – Ben, Nikola & Walter’s 80s & 90s 38 Other Insights 43 References 57 About the Author 58 Benjamin, Nikola, & Walter: Geniuses Who Maximized Their Creative Energies By Jonathan V. L. Kiser – August 2019 Overview This report compares the lives of three historical geniuses: Benjamin Franklin, Nikola Tesla, and Walter Russell. By examining their extraordinary lives in a chronological, time-line basis, observations can be drawn relating to their accomplishments, similarities, and differences during all phases of their lives. These comparisons are supplemented with more than 100 public domain photos, drawings, and related images associated with each remarkable man. Additional insights about them are then presented. Here now is a brief overview relating to Ben, Nikola, and Walter. Benjamin Franklin (1706 – 1790) was an American polymath (a person of wide-ranging knowledge or learning) and one of the Founding Fathers of the United States. Franklin was a leading author, printer, political theorist, politician, Freemason, postmaster, scientist, inventor, humorist, civic activist, statesman, and diplomat. -

Development of Intelligent Drone Battery Charging System Based on Wireless Power Transmission Using Hill Climbing Algorithm
Article Development of Intelligent Drone Battery Charging System Based on Wireless Power Transmission Using Hill Climbing Algorithm Ali Rohan 1,* , Mohammed Rabah 1 , Muhammad Talha 1 and Sung-Ho Kim 2 1 Department of Electrical, Electronics and Information Engineering, Kunsan National University, Gunsan-Si 573-360, Korea; [email protected] (M.R.); [email protected] (M.T.) 2 Department of Control and Robotics Engineering, Kunsan National University, Gunsan-Si 573-360, Korea; [email protected] * Correspondence: [email protected]; Tel.: +82-10-2857-6080 Received: 13 September 2018; Accepted: 5 November 2018; Published: 7 November 2018 Abstract: In this work, an advanced drone battery charging system is developed. The system is composed of a drone charging station with multiple power transmitters and a receiver to charge the battery of a drone. A resonance inductive coupling-based wireless power transmission technique is used. With limits of wireless power transmission in inductive coupling, it is necessary that the coupling between a transmitter and receiver be strong for efficient power transmission; however, for a drone, it is normally hard to land it properly on a charging station or a charging device to get maximum coupling for efficient wireless power transmission. Normally, some physical sensors such as ultrasonic sensors and infrared sensors are used to align the transmitter and receiver for proper coupling and wireless power transmission; however, in this system, a novel method based on the hill climbing algorithm is proposed to control the coupling between the transmitter and a receiver without using any physical sensor. The feasibility of the proposed algorithm was checked using MATLAB. -

Rediscovery of a Genius the Inventor of a Century: Nikola Tesla
RediscoveRy of a Genius The inventor of a century: Nikola Tesla • an exclusive interview * The most unbelievable rumors exist around Tesla. In what respect is it necessary to cor- ikola Tesla is one of the most im- rect our perception of Nikola Tesla? Nportant masterminds of the mod- Tesla was not a mystic, was not a loon, but ern world. He created everything from a quite “normal” genius saddled with ev electrical distribution to telecommu- erything that comes with such a mind. He nication, and our world would be very left deep marks not only in the real world, different without his inventions. But but in the world of fantasy as well: without surprisingly, Nikola Tesla (1856 –1943) Tesla, there would be no AC system and is still relatively unknown; even school- no “Star Wars”. Tesla is a “missing link ”, a books often neglect his name. Now, blind spot in the history of mankind. however, the author Michael Krause has won acclaim for rediscovering this gifted scientist and visionary. A pro- ducer and a director by trade, Michael Krause is also a historian with a well- further info: equipped archive on Tesla. After fin- www.michaelkrause.org ishing his documentary film on Tesla, www.allabouttesla.com Krause dedicated himself to creating a Michael Krause fascinating portrait of Tesla in this new book. the bottom of all things and started to ask: How does this work – and how could it • work better? From his mother’s side came craft and diligence, from his father’s, men ikola Tesla, the misunderstood ge Why are you so fascinated by Tesla? Why tal strength and the will to fight for your Nnius, was a puzzle at all times. -
What Can You Do with a Dip Meter? Quite a Bit! the Dipper Is One Piece of Test Equipment That Can Replace a Whole Shelf of Expensive Gear—If You Know How to Use It
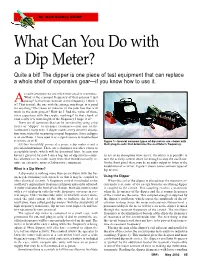
By Mark Bradley, K6TAF What Can You Do with a Dip Meter? Quite a bit! The dipper is one piece of test equipment that can replace a whole shelf of expensive gear—if you know how to use it. s radio amateurs we are often interested in resonance. What is the resonant frequency of that antenna I just Aput up? Is that trap resonant at the frequency I think it is? That crystal, the one with the strange markings, is it good for anything? Do I have an inductor in the junk box that will work in the next project? How do I find the value of those mica capacitors with the cryptic markings? Is that chunk of coax really a ¼ wavelength at the frequency I hope it is? These are all questions that can be answered by using a dip meter or “dipper” to measure resonance—just one of the instrument’s many uses. A dipper makes a very sensitive absorp- tion wave meter for measuring a signal frequency. Since a dipper is an oscillator, I have used it as a signal source to troubleshoot receivers, as well. Figure 1—Several common types of dip meters are shown with All this versatility comes at a price; a dip meter is not a their plug-in coils that determine the oscillator’s frequency. precision instrument. There are techniques to reduce errors to acceptable levels, which will be discussed later. In case you haven’t guessed by now I am a big fan of dip meters—mine its use as an absorption wave meter. -

NIKOLA TESLA July 10, 1856 – January 7, 1943
The AMA History Project Presents: Biography of NIKOLA TESLA July 10, 1856 – January 7, 1943 Written by GS (03/1976); Transcribed and reformatted by JS (09/2010) The following was published in the March 1976 issue of Model Aviation magazine, written by George V. Sosic. TESLA – The Father of RC On September 2, 1897, the Chief U.S. Examiner of Patents visited the laboratory of Nikola Tesla in New York. This visit was prompted by his belief that this inventor’s latest patent application went far beyond the realm of possibility in his claim of a practical wireless control system for vessels and vehicles from a great distance. It should be noted that the above date preceded the Wright brothers’ airplane by more than six years. Tesla gave his control system the name of Teleautomatics. It is now known as the guided-missile principle, RPV (remotely piloted vehicles) and radio control, which the model aircraft fraternity calls RC. This article was written for model aircraft builders and fliers, so the writer will refer to it as RC. Four years before Tesla shook up the Chief U.S. Examiner of Patents with his application for a patent on RC, he demonstrated a vacuum-tube radio for voice and music at the 1893 World’s Fair in Chicago, so anyone with any electronic knowledge at all can easily see that his next logical step would be to convert his frequency control and tuning knowledge to other uses such as RC and automation. Tesla showed his bench-mounted RC components in working order. -

Treim Rta ¡Let Througlit
www.poptronics.com JULY 2000 Formerly U ar ectronies and 40' - 00 - WASP 111.11016101."- 111111.11°X7170"-_--- o recycl e- --- -1110P".--.- Hate a treim rtA ¡Let througlit 0-P °-' A GERNSBACK PUBLICATION Robot Motors Digitizing fpIthp #RXPOCCH x:r:)Kxxxxxxx5-DIGtT 2to4e 10 Tips' IS Er Sliteui Supercop #21046DH11951RD0070, PT RORFR T PJ(HM P I '22 Of New Ter 9515 RED Rt4IN PATH MOY 2002 fi IrrY f I !$4 99 U.S. CaLLYIRIR NE) 21046-2073 /46 Ne $5 99 CAN. ft www.americanradiohistory.comAmericanRadioHistory.Com Virtual Lab - Real Results Intuitive schematic capture Fast, accurate analog! digital simulation Full- featured pcb layout Built -in autorouting CircuitMaker 2000 provides all the tools necessary to quickly and easily design circuits, test them in the real world and generate prototype boards - the complete virtual electronics lab solution. With all the features you'd expect from a professional design system - plus exceptional ease -of -use, you'll spend less time learning and more time designing. Available in both standard and professional editions, CircuitMaker 2000 gives you full design capability at a price that is simply unmatched by the competition. FR( NI Contact us for your Free CircuitMaker 2000 brochure New License Upgrade from $95 Comprehensive educational and computer -based training packages also available the virtual electronics lab Call your local CircuitMaker saes & support center on 800 419 -4242 CircuitMaker. or visit www.circuitmaker.com the virtual electronics lab° CircuitMaker and C rcui-Maker 2000 are registered tadeTarks A Protel International lirited. CIRCLE 133 ON FREE INFORMATION CARD www.americanradiohistory.comAmericanRadioHistory.Com July 2000, Vol. -

Nikola Tesla (Никола Тесла, July 10, 1856 – Jan 7, 1943) Was Stating: the Greatest Electrical Engineer
19/11/2016 Donald Trumps Uncle was the MIT electrical genius who inspected Tesla's secret papers after Teslas death which were rumored to have time travel, alien… I MIEI SUBREDDIT Vuoi unirti? Accedi o registratiALTRI » in pochi secondi.|italiano (Italy) PAGINA PRINCIPALE TUTTI CASUALI | ASKREDDIT FUNNY PICS TODAYILEARNED NEWS VIDEOS AWW GAMING GIFS WORLDNEWS MILDLYINTERESTING N i k o l a Te s l a commenti Cerca Questo è un post archiviato. Non potrai votarlo o commentarlo. questo post è stato inviato il 04 Oct 2015 12 punti (74% ha dato un upvote) history Donald Trumps Uncle was the MIT 12 shortlink: https://redd.it/3nfgqm electrical genius who inspected Tesla's secret papers after Teslas death which nome utente password were rumored to have time travel, alien communication and a deathray beam ricordami resetta la password accedi secrets. (self.Tesla) inviato 1 anno fa da reddbullish Submit link Submit text post John G Trump is Donald Trumps Uncle and was the guy who examined Teslas papers at Teslas death! Trump was at MIT working on all types of radiation and atomic stuff! He died in 1985 the year Back to the Future was released . http://www.nytimes.com/1985/02/26/us/joh n-trump-dies-engineer-was-78.html Tesla's entire estate from the Hotel New Yorker and other New York City hotels was transported to the Manhattan Storage and Warehouse Company under the Office of Alien Property (OAP) seal. [25] John G. Trump, a professor at M.I.T. and a well-known electrical engineer serving as a technical aide to the National Defense Research Committee, was called in to analyze the Tesla items iscriviti T~e1s0 luatenti qui ora3.643 lettori in OAP custody.[25] After a three-day “If we use fuel to get our power, we are living on our investigation, Trump's report concluded capital and exhausting it rapidly. -

Tesla's Multi-Frequency Wireless Radio Controlled Vessel
Tesla’s Multi-frequency Wireless Radio Controlled Vessel Aleksandar Marincic1 Life Member, IEEE Djuradj Budimir2 Senior Member, IEEE 1Department of Electronic Engineering, University of Belgrade, Serbia. 2Wireless Communications Research Group, University of Westminster, 115 New Cavendish Street, London W1W 6UW, United Kingdom Abstract – A review of the Tesla’s contribution to dual-band blow to him and many experiments were stopped until the end wireless radio controlled vessel is presented. The intention of this of 1895 when he opened a new laboratory on 46th East paper is to describe multi-frequency remote controlled vessel Houston Street. In this laboratory he made, in his own words: using two transmitters and which operate a distant receiver “Striking demonstrations, in many instances actually which comprises two or more circuits, each of which is tuned to respond exclusively to the signals of one frequency and so transmitting the whole motive energy to the devices instead of arranged that the operation of the receiver is dependent upon simply controlling the same from distance. In ’97 I began the their conjoint or resultant action. construction of a complete Automaton in the form of a boat, which is described in my original specification #613,809… Index Terms — Nikola Tesla, wireless communications, radio This application was written during that year but the filing wave propagation, multifrequency control system. was delayed until July of the following year, long before which date the machine had been often exhibited to visitors I. Introduction who never seized to wonder at the performances… In that year I also constructed a larger boat which I exhibited, among Tesla’s patents, published and unpublished notes about other things, in Chicago during a lecture before the wireless radio wave propagation is less known, and if known Commercial Club. -
Wireless Inductive Charging
Wireless Inductive Charging Tesla Unplugged Ari Ferro [email protected] Jeff Thacker [email protected] Zach Wilcox [email protected] http://www.eng.utah.edu/~zwilcox/senior_project/ Abstract This paper outlines the proposed development of a wireless inductive charging system for remote controlled vehicles. The project aims to increase the viability of electric vehicles by creating a proof of concept for inductive charging while a vehicle is moving. The system will initially charge vehicles while they are stationary and record that information in a database. Eventually the project will attempt to demonstrate that a charge can be received when a vehicle is in motion over the inductive pad. 1 I. Motivation Electric vehicles are becoming more prevalent in today’s society and represent a major step towards global sustainability. There are still significant obstacles to adopting electric vehicles on a large scale, including limited range and a limited number of charging stations. This project is an attempt to solve this problem by creating a proof of concept wireless inductive charging system that can recharge vehicles while they move. Initially this project will create stationary charging pads on which a remote control car may stop, charge, and have the charge received recorded in a database for billing purposes. Eventually the system will be adapted so that the car will be able to receive a small charge while it is moving over the charging pads. II. Introduction The project is comprised of four main components as shown in Figure 1: the base station, the electric vehicles, the charging circuitry, and a computer. -

Advisory Circular (AC) 150/5345-49D, Specification L-854, Radio
U.S. Department Advisory of Transportation Federal Aviation Circular Administration Subject: Specification L-854, Radio Control Date: 1/17/2017 AC No: 150/5345-49D Equipment Initiated By: AAS-100 Change: 1 Purpose. This advisory circular (AC) contains the specifications for radio control equipment to be used for controlling airport lighting facilities. 2 Effective Date. Effective six months after the issue date of this AC, only equipment certified per the specifications herein will be listed per AC 150/5345-53, Airport Lighting Equipment Certification Program. 3 Cancellation. This AC cancels AC 150/5345-49C, Specification L-854, Radio Control Equipment, dated June 27, 2007. 4 Application. The Federal Aviation Administration (FAA) recommends the guidance and specifications in this Advisory Circular for L-854 Radio Control Equipment. In general, use of this AC is not mandatory. However, use of the specifications in this AC is mandatory for all projects funded under the Airport Improvement Program (AIP) or with revenue from the Passenger Facility Charge (PFC) Program. All lighting designs contained in this AC are acceptable to the Administrator to meet the lighting requirements under 14 CFR § 139.311, Marking, Signs and Lighting. 5 Principal Changes. Change low end of environmental temperature range from -67° F (-55° C) to -40° F (- 40° C) for better parts availability. 1/17/2017 AC 150/5345-49D 6 Metric Units. To promote an orderly transition to metric units, the specification includes both English and metric units. The metric conversions may not be exact equivalents, and until there is an official changeover to the metric system, the English dimensions will govern.