The Neocognitron As a System for Handavritten Character Recognition: Limitations and Improvements
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
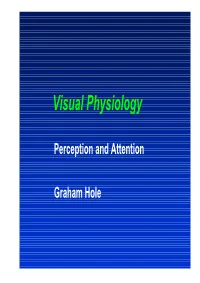
Visual Physiology
Visual Physiology Perception and Attention Graham Hole Problems confronting the visual system: Retinal image contains a huge amount of information - which must be processed quickly. Retinal image is dim, blurry and distorted. Light levels vary enormously. Solutions: Enhance the important information (edges and contours). Process relative intensities, not absolute light levels. Use two systems, one for bright light and another for twilight (humans). The primary visual pathways: The right visual field is represented in the left hemisphere. The left visual field is represented in the right hemisphere The eye: 50% of light entering the eye is lost by absorption & scattering (diffraction). The rest strikes retinal photoreceptors. Photoreceptors: Rod Outer Segment Cone The retina contains two kinds of photoreceptors, rods and cones. Inner Segment Pedicle Why are two kinds of photoreceptor needed? 2 S Surface Luminance (cd/m ) c o t o White paper in starlight 0.05 p i c White paper in moonlight 0.5 White paper in artificial light 250 P ho t Computer monitor, TV 100 o p i White paper in sunlight 30,000 c Ambient light levels can vary hugely, by a factor of 10,000,000. Pupil diameter can vary retinal illumination by only a factor of 16. Rods respond at low (scotopic) light levels. Cones respond at high (photopic) light levels. Differences between rods and cones: Sensitivity Number Retinal distribution Visual Pigment Number and distribution of receptors: There are about 120 million rods, and 8 million cones. Cones are concentrated in central vision, around the fovea. Rods cover the entire retina, with the exception of the fovea. -
Multiscale Computation and Dynamic Attention in Biological and Artificial
brain sciences Review Multiscale Computation and Dynamic Attention in Biological and Artificial Intelligence Ryan Paul Badman 1,* , Thomas Trenholm Hills 2 and Rei Akaishi 1,* 1 Center for Brain Science, RIKEN, Saitama 351-0198, Japan 2 Department of Psychology, University of Warwick, Coventry CV4 7AL, UK; [email protected] * Correspondence: [email protected] (R.P.B.); [email protected] (R.A.) Received: 4 March 2020; Accepted: 17 June 2020; Published: 20 June 2020 Abstract: Biological and artificial intelligence (AI) are often defined by their capacity to achieve a hierarchy of short-term and long-term goals that require incorporating information over time and space at both local and global scales. More advanced forms of this capacity involve the adaptive modulation of integration across scales, which resolve computational inefficiency and explore-exploit dilemmas at the same time. Research in neuroscience and AI have both made progress towards understanding architectures that achieve this. Insight into biological computations come from phenomena such as decision inertia, habit formation, information search, risky choices and foraging. Across these domains, the brain is equipped with mechanisms (such as the dorsal anterior cingulate and dorsolateral prefrontal cortex) that can represent and modulate across scales, both with top-down control processes and by local to global consolidation as information progresses from sensory to prefrontal areas. Paralleling these biological architectures, progress in AI is marked by innovations in dynamic multiscale modulation, moving from recurrent and convolutional neural networks—with fixed scalings—to attention, transformers, dynamic convolutions, and consciousness priors—which modulate scale to input and increase scale breadth. -

Deep Neural Network Models for Sequence Labeling and Coreference Tasks
Federal state autonomous educational institution for higher education ¾Moscow institute of physics and technology (national research university)¿ On the rights of a manuscript Le The Anh DEEP NEURAL NETWORK MODELS FOR SEQUENCE LABELING AND COREFERENCE TASKS Specialty 05.13.01 - ¾System analysis, control theory, and information processing (information and technical systems)¿ A dissertation submitted in requirements for the degree of candidate of technical sciences Supervisor: PhD of physical and mathematical sciences Burtsev Mikhail Sergeevich Dolgoprudny - 2020 Федеральное государственное автономное образовательное учреждение высшего образования ¾Московский физико-технический институт (национальный исследовательский университет)¿ На правах рукописи Ле Тхе Ань ГЛУБОКИЕ НЕЙРОСЕТЕВЫЕ МОДЕЛИ ДЛЯ ЗАДАЧ РАЗМЕТКИ ПОСЛЕДОВАТЕЛЬНОСТИ И РАЗРЕШЕНИЯ КОРЕФЕРЕНЦИИ Специальность 05.13.01 – ¾Системный анализ, управление и обработка информации (информационные и технические системы)¿ Диссертация на соискание учёной степени кандидата технических наук Научный руководитель: кандидат физико-математических наук Бурцев Михаил Сергеевич Долгопрудный - 2020 Contents Abstract 4 Acknowledgments 6 Abbreviations 7 List of Figures 11 List of Tables 13 1 Introduction 14 1.1 Overview of Deep Learning . 14 1.1.1 Artificial Intelligence, Machine Learning, and Deep Learning . 14 1.1.2 Milestones in Deep Learning History . 16 1.1.3 Types of Machine Learning Models . 16 1.2 Brief Overview of Natural Language Processing . 18 1.3 Dissertation Overview . 20 1.3.1 Scientific Actuality of the Research . 20 1.3.2 The Goal and Task of the Dissertation . 20 1.3.3 Scientific Novelty . 21 1.3.4 Theoretical and Practical Value of the Work in the Dissertation . 21 1.3.5 Statements to be Defended . 22 1.3.6 Presentations and Validation of the Research Results . -
![Arxiv:2107.04562V1 [Stat.ML] 9 Jul 2021 ¯ ¯ Θ∗ = Arg Min `(Θ) Where `(Θ) = `(Yi, Fθ(Xi)) + R(Θ)](https://docslib.b-cdn.net/cover/5758/arxiv-2107-04562v1-stat-ml-9-jul-2021-%C2%AF-%C2%AF-arg-min-where-yi-f-xi-r-285758.webp)
Arxiv:2107.04562V1 [Stat.ML] 9 Jul 2021 ¯ ¯ Θ∗ = Arg Min `(Θ) Where `(Θ) = `(Yi, Fθ(Xi)) + R(Θ)
The Bayesian Learning Rule Mohammad Emtiyaz Khan H˚avard Rue RIKEN Center for AI Project CEMSE Division, KAUST Tokyo, Japan Thuwal, Saudi Arabia [email protected] [email protected] Abstract We show that many machine-learning algorithms are specific instances of a single algorithm called the Bayesian learning rule. The rule, derived from Bayesian principles, yields a wide-range of algorithms from fields such as optimization, deep learning, and graphical models. This includes classical algorithms such as ridge regression, Newton's method, and Kalman filter, as well as modern deep-learning algorithms such as stochastic-gradient descent, RMSprop, and Dropout. The key idea in deriving such algorithms is to approximate the posterior using candidate distributions estimated by using natural gradients. Different candidate distributions result in different algorithms and further approximations to natural gradients give rise to variants of those algorithms. Our work not only unifies, generalizes, and improves existing algorithms, but also helps us design new ones. 1 Introduction 1.1 Learning-algorithms Machine Learning (ML) methods have been extremely successful in solving many challenging problems in fields such as computer vision, natural-language processing and artificial intelligence (AI). The main idea is to formulate those problems as prediction problems, and learn a model on existing data to predict the future outcomes. For example, to design an AI agent that can recognize objects in an image, we D can collect a dataset with N images xi 2 R and object labels yi 2 f1; 2;:::;Kg, and learn a model P fθ(x) with parameters θ 2 R to predict the label for a new image. -

Convolutional Neural Network Model Layers Improvement for Segmentation and Classification on Kidney Stone Images Using Keras and Tensorflow
Journal of Multidisciplinary Engineering Science and Technology (JMEST) ISSN: 2458-9403 Vol. 8 Issue 6, June - 2021 Convolutional Neural Network Model Layers Improvement For Segmentation And Classification On Kidney Stone Images Using Keras And Tensorflow Orobosa Libert Joseph Waliu Olalekan Apena Department of Computer / Electrical and (1) Department of Computer / Electrical and Electronics Engineering, The Federal University of Electronics Engineering, The Federal University of Technology, Akure. Nigeria. Technology, Akure. Nigeria. [email protected] (2) Biomedical Computing and Engineering Technology, Applied Research Group, Coventry University, Coventry, United Kingdom [email protected], [email protected] Abstract—Convolutional neural network (CNN) and analysis, by automatic or semiautomatic means, of models are beneficial to image classification large quantities of data in order to discover meaningful algorithms training for highly abstract features patterns [1,2]. The domains of data mining include: and work with less parameter. Over-fitting, image mining, opinion mining, web mining, text mining, exploding gradient, and class imbalance are CNN and graph mining and so on. Some of its applications major challenges during training; with appropriate include anomaly detection, financial data analysis, management training, these issues can be medical data analysis, social network analysis, market diminished and enhance model performance. The analysis [3]. Recent progress in deep learning using models are 128 by 128 CNN-ML and 256 by 256 CNN machine learning (CNN-ML) has been helpful in CNN-ML training (or learning) and classification. decision support and contributed to positive outcome, The results were compared for each model significantly. The application of CNN-ML to diverse classifier. The study of 128 by 128 CNN-ML model areas of soft computing is adapted diagnosis has the following evaluation results consideration procedure to enhance time and accuracy [4]. -

Training Plastic Neural Networks with Backpropagation
Differentiable plasticity: training plastic neural networks with backpropagation Thomas Miconi 1 Jeff Clune 1 Kenneth O. Stanley 1 Abstract examples. By contrast, biological agents exhibit a remark- How can we build agents that keep learning from able ability to learn quickly and efficiently from ongoing experience, quickly and efficiently, after their ini- experience: animals can learn to navigate and remember the tial training? Here we take inspiration from the location of (and quickest way to) food sources, discover and main mechanism of learning in biological brains: remember rewarding or aversive properties of novel objects synaptic plasticity, carefully tuned by evolution and situations, etc. – often from a single exposure. to produce efficient lifelong learning. We show Endowing artificial agents with lifelong learning abilities that plasticity, just like connection weights, can is essential to allowing them to master environments with be optimized by gradient descent in large (mil- changing or unpredictable features, or specific features that lions of parameters) recurrent networks with Heb- are unknowable at the time of training. For example, super- bian plastic connections. First, recurrent plastic vised learning in deep neural networks can allow a neural networks with more than two million parameters network to identify letters from a specific, fixed alphabet can be trained to memorize and reconstruct sets to which it was exposed during its training; however, au- of novel, high-dimensional (1,000+ pixels) nat- tonomous learning abilities would allow an agent to acquire ural images not seen during training. Crucially, knowledge of any alphabet, including alphabets that are traditional non-plastic recurrent networks fail to unknown to the human designer at the time of training. -

A Linear Systems View to the Concept of Strfs Mounya Elhilali(1)
A linear systems view to the concept of STRFs Mounya Elhilali (1) , Shihab Shamma (2,3) , Jonathan Z Simon (2,3,4) , Jonathan B. Fritz (3) (1) Department of Electrical & Computer Engineering, Johns Hopkins University (2) Department of Electrical & Computer Engineering, University of Maryland, College Park (3)Institute for Systems Research, University of Maryland, College Park (4)Department of Biology, University of Maryland, College Park 1. Introduction A key requirement in the study of sensory nervous systems is the ability to characterize effectively neuronal response selectivity. In the visual system, striving for this objective yielded remarkable progress in understanding the functional organization of the visual cortex and its implications to perception. For instance, the discovery of ordered feature representations of retinal space, color, ocular dominance, orientation, and motion direction in various cortical fields has catalyzed extensive studies into the anatomical bases of this organization, its developmental course, and the changes it undergoes during learning or following injury. In the primary auditory cortex (A1), response selectivity of the neurons (also called their receptive fields ) is ordered topographically according to the frequency they are most tuned to, an organization inherited from the cochlea. Beyond their tuning, however, A1 responses and receptive fields exhibit a bewildering variety of dynamics, frequency bandwidths, response thresholds, and patterns of excitatory and inhibitory regions. All this has been learned over decades of testing with a large variety of acoustic stimuli (tones, clicks, noise, and natural sounds) and response measures (tuning curves, rate-level functions, and binaural maps). A response measure that has proven particularly useful beyond the feature- specific measures enumerated earlier is the notion of a generalized spatiotemporal , or equivalently for the auditory system, the spectro-temporal receptive field (STRF). -

Simultaneous Unsupervised and Supervised Learning of Cognitive
Simultaneous unsupervised and supervised learning of cognitive functions in biologically plausible spiking neural networks Trevor Bekolay ([email protected]) Carter Kolbeck ([email protected]) Chris Eliasmith ([email protected]) Center for Theoretical Neuroscience, University of Waterloo 200 University Ave., Waterloo, ON N2L 3G1 Canada Abstract overcomes these limitations. Our approach 1) remains func- tional during online learning, 2) requires only two layers con- We present a novel learning rule for learning transformations of sophisticated neural representations in a biologically plau- nected with simultaneous supervised and unsupervised learn- sible manner. We show that the rule, which uses only infor- ing, and 3) employs spiking neuron models to reproduce cen- mation available locally to a synapse in a spiking network, tral features of biological learning, such as spike-timing de- can learn to transmit and bind semantic pointers. Semantic pointers have previously been used to build Spaun, which is pendent plasticity (STDP). currently the world’s largest functional brain model (Eliasmith et al., 2012). Two operations commonly performed by Spaun Online learning with spiking neuron models faces signifi- are semantic pointer binding and transmission. It has not yet been shown how the binding and transmission operations can cant challenges due to the temporal dynamics of spiking neu- be learned. The learning rule combines a previously proposed rons. Spike rates cannot be used directly, and must be esti- supervised learning rule and a novel spiking form of the BCM mated with causal filters, producing a noisy estimate. When unsupervised learning rule. We show that spiking BCM in- creases sparsity of connection weights at the cost of increased the signal being estimated changes, there is some time lag signal transmission error. -

The History Began from Alexnet: a Comprehensive Survey on Deep Learning Approaches
> REPLACE THIS LINE WITH YOUR PAPER IDENTIFICATION NUMBER (DOUBLE-CLICK HERE TO EDIT) < 1 The History Began from AlexNet: A Comprehensive Survey on Deep Learning Approaches Md Zahangir Alom1, Tarek M. Taha1, Chris Yakopcic1, Stefan Westberg1, Paheding Sidike2, Mst Shamima Nasrin1, Brian C Van Essen3, Abdul A S. Awwal3, and Vijayan K. Asari1 Abstract—In recent years, deep learning has garnered I. INTRODUCTION tremendous success in a variety of application domains. This new ince the 1950s, a small subset of Artificial Intelligence (AI), field of machine learning has been growing rapidly, and has been applied to most traditional application domains, as well as some S often called Machine Learning (ML), has revolutionized new areas that present more opportunities. Different methods several fields in the last few decades. Neural Networks have been proposed based on different categories of learning, (NN) are a subfield of ML, and it was this subfield that spawned including supervised, semi-supervised, and un-supervised Deep Learning (DL). Since its inception DL has been creating learning. Experimental results show state-of-the-art performance ever larger disruptions, showing outstanding success in almost using deep learning when compared to traditional machine every application domain. Fig. 1 shows, the taxonomy of AI. learning approaches in the fields of image processing, computer DL (using either deep architecture of learning or hierarchical vision, speech recognition, machine translation, art, medical learning approaches) is a class of ML developed largely from imaging, medical information processing, robotics and control, 2006 onward. Learning is a procedure consisting of estimating bio-informatics, natural language processing (NLP), cybersecurity, and many others. -

The Understanding of Convolutional Neuron Network Family
2017 2nd International Conference on Computer Engineering, Information Science and Internet Technology (CII 2017) ISBN: 978-1-60595-504-9 The Understanding of Convolutional Neuron Network Family XINGQUN QI ABSTRACT Along with the development of the computing speed and Artificial Intelligence, more and more jobs have been done by computers. Convolutional Neural Network (CNN) is one of the most popular algorithms in the field of Deep Learning. It is mainly used in computer identification, especially in voice, text recognition and other aspects of the application. CNNs have been developed for decades. In theory, Convolutional Neural Network has gradually become more mature. However, in practical applications, it is limited by various conditions. This paper will introduce the course of Convolutional Neural Network’s development today, as well as the current more mature and popular architecture and related applications of it, to help readers have more macro and comprehensive understanding of Convolutional Neural Networks. KEYWORDS Convolutional Neuron Network, Architecture, CNN family, Application INTRODUCTION With the continuous improvements of technology, there are more and more multi- disciplinary applications achieved with computer technology. And Machine Learning, especially Deep Learning is one of the most indispensable and important parts of that technology. Deep learning has the great advantage of acquiring features and modeling from data [1]. The Convolutional Neural Network (CNN) algorithm is one of the best and foremost algorithms in the Deep Learning algorithms. It is mainly used for image recognition and computer vision. In today’s living conditions, the impact and significance of CNN is becoming more and more important. In computer vision, CNN has an important position. -

Methods and Trends in Natural Language Processing Applications in Big Data
International Journal of Recent Technology and Engineering (IJRTE) ISSN: 2277-3878, Volume-7, Issue-6S5, April 2019 Methods and Trends in Natural Language Processing Applications in Big Data Joseph M. De Guia, Madhavi Devaraj translation that can be processed and accessible to computer Abstract: Understanding the natural language of humans by applications. Some of the tasks available to NLP can be the processing them in the computer makes sense for applications in following: machine translation, generation and understanding solving practical problems. These applications are present in our of natural language, morphological separation, part of speech systems that automates some and even most of the human tasks performed by the computer algorithms.The “big data” deals with tagging, recognition of speech, entities, optical characters, NLP techniques and applications that sifts through each word, analysis of discourse, sentiment analysis, etc. Through these phrase, sentence, paragraphs, symbols, images, speech, tasks, NLPs achieved the goal of analyzing, understanding, utterances with its meanings, relationships, and translations that and generating the natural language of human using a can be processed and accessible to computer applications by computer application and with the help of learning humans. Through these automated tasks, NLPs achieved the goal techniques. of analyzing, understanding, and generating the natural This paper is a survey of the published literature in NLP and language of human using a computer application and with the its uses to big data. This also presents a review of the NLP help of classic and advanced machine learning techniques. This paper is a survey of the published literature in NLP and its uses to applications and learning techniques used in some of the big data. -

Connectionist Models of Cognition Michael S. C. Thomas and James L
Connectionist models of cognition Michael S. C. Thomas and James L. McClelland 1 1. Introduction In this chapter, we review computer models of cognition that have focused on the use of neural networks. These architectures were inspired by research into how computation works in the brain and subsequent work has produced models of cognition with a distinctive flavor. Processing is characterized by patterns of activation across simple processing units connected together into complex networks. Knowledge is stored in the strength of the connections between units. It is for this reason that this approach to understanding cognition has gained the name of connectionism. 2. Background Over the last twenty years, connectionist modeling has formed an influential approach to the computational study of cognition. It is distinguished by its appeal to principles of neural computation to inspire the primitives that are included in its cognitive level models. Also known as artificial neural network (ANN) or parallel distributed processing (PDP) models, connectionism has been applied to a diverse range of cognitive abilities, including models of memory, attention, perception, action, language, concept formation, and reasoning (see, e.g., Houghton, 2005). While many of these models seek to capture adult function, connectionism places an emphasis on learning internal representations. This has led to an increasing focus on developmental phenomena and the origins of knowledge. Although, at its heart, connectionism comprises a set of computational formalisms,