Alternative Perspectives 3.1
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Class-4 Computer L-2 Input and Output Devices
CLASS-4 COMPUTER L-2 INPUT AND OUTPUT DEVICES BOOK EXERCISE A. Tick () the correct options. 1. Which of the following is NOT an input device? a. touchpad ( ) b. projector () c. MICR ( ) 2. What does OCR stands for? a. Optical Character Recognition () b. Oriented Character Recognition ( ) c. Optical Copy Recognition ( ) 3. A plotter prints on paper by using . a. A stylus ( ) b. pencils ( ) c. pens () 4. Which of the following is an output device? a. projector ( ) b. laser printer ( ) c. both a and b () B. Fill in the blanks. Picture barcode biometric projection MICR typeface 1. A barcode is a pattern of parallel lines of varying width printed on different products. 2. OCR does not treat the text as picture. 3. A projector projects an image (or moving images) onto a large surface known as projection screen. 4. The MICR technology recognizes the data printed bin the MICR typeface. 5. A biometric device uses fingerprint, facial scans or voice recognition to identify users. CLASS-4 COMPUTER L-2 INPUT AND OUTPUT DEVICES C. Identify each of the following as input or output devices. Projector, Light pen, Touchpad, Touchscreen, web-cam, Monitor, Printer, Plotter, Keyboard, Mouse, MICR, Speakers, Scanner, OCR, Microphone. Ans: Input Devices Output Devices MICR Projector Touchpad Monitor Scanner Printer Touchscreen Speakers Keyboard Plotter OCR Web Cam Mouse Microphone D. Answer in one word- 1. A latest input device enables you to choose options on the computer screen by simply touching with a finger. (Touchscreen) 2. A device that projects an image onto a large surface. (Projector) 3. A device that draws on paper with one or more automated pens. -

Evolution of the Graphical Processing Unit
University of Nevada Reno Evolution of the Graphical Processing Unit A professional paper submitted in partial fulfillment of the requirements for the degree of Master of Science with a major in Computer Science by Thomas Scott Crow Dr. Frederick C. Harris, Jr., Advisor December 2004 Dedication To my wife Windee, thank you for all of your patience, intelligence and love. i Acknowledgements I would like to thank my advisor Dr. Harris for his patience and the help he has provided me. The field of Computer Science needs more individuals like Dr. Harris. I would like to thank Dr. Mensing for unknowingly giving me an excellent model of what a Man can be and for his confidence in my work. I am very grateful to Dr. Egbert and Dr. Mensing for agreeing to be committee members and for their valuable time. Thank you jeffs. ii Abstract In this paper we discuss some major contributions to the field of computer graphics that have led to the implementation of the modern graphical processing unit. We also compare the performance of matrix‐matrix multiplication on the GPU to the same computation on the CPU. Although the CPU performs better in this comparison, modern GPUs have a lot of potential since their rate of growth far exceeds that of the CPU. The history of the rate of growth of the GPU shows that the transistor count doubles every 6 months where that of the CPU is only every 18 months. There is currently much research going on regarding general purpose computing on GPUs and although there has been moderate success, there are several issues that keep the commodity GPU from expanding out from pure graphics computing with limited cache bandwidth being one. -

Computer Input Devices
COMPUTER - INPUT DEVICES http://www.tuto rialspo int.co m/co mputer_fundamentals/co mputer_input_devices.htm Copyrig ht © tutorialspoint.com Following are few of the important input devices which are used in Computer Systems Keyboard Mouse Joy Stick Lig ht pen Track Ball Scanner Graphic Tablet Microphone Mag netic Ink Card Reader(MICR) Optical Character Reader(OCR) Bar Code Reader Optical Mark Reader Keyboard Most common and very popular input device is keyboard. The keyboard helps in inputting the data to the computer.The layout of the keyboard is like that of traditional typewriter, althoug h there are some additional keys provided for performing some additional functions. Keyboard are of two sizes 84 keys or 101/102 keys, but now 104 keys or 108 keys keyboard is also available for Windows and Internet. The keys are following Sr. Keys Description No. 1 Typing Keys These keys include the letter keys (A-Z) and dig its keys (0-9) which are g enerally g ive same layout as that of typewriters. 2 Numeric Keypad It is used to enter numeric data or cursor movement. Generally, it consists of a set of 17 keys that are laid out in the same config uration used by most adding machine and calculators. 3 Function Keys The twelve functions keys are present on the keyboard. These are arrang ed in a row along the top of the keyboard.Each function key has unique meaning and is used for some specific purpose. 4 Control keys These keys provides cursor and screen control. It includes four directional arrow key.Control keys also include Home, End,Insert, Delete, Pag e Up, Pag e Down, Control(Ctrl), Alternate(Alt), Escape(Esc). -

Chapter 9. Input Devices
Table of contents 9 Input devices .................................................................................................................9-1 9.1 Keyboards ............................................................................................................. 9-4 9.2 Fixed-function keys .............................................................................................. 9-6 9.3 Pointing devices.................................................................................................... 9-7 9.3.1 General........................................................................................................... 9-7 9.3.2 Mouse ............................................................................................................ 9-9 9.3.3 Joystick and trackball .................................................................................. 9-10 9.3.3.1 General..................................................................................................9-10 9.3.3.2 Hand-operated displacement joysticks .................................................9-10 9.3.3.3 Finger-operated displacement joysticks................................................9-11 9.3.3.4 Thumb tip and fingertip-operated displacement joysticks....................9-13 9.3.3.5 Hand-operated isometric joysticks........................................................9-13 9.3.3.6 Thumb tip and fingertip-operated isometric joysticks..........................9-14 9.3.3.7 Ball controls..........................................................................................9-14 -

Chapter 3 Input Devices
CSCA0201 FUNDAMENTALS OF COMPUTING Chapter 3 Input Devices 1 Input Devices Topics: • Input Devices • Examples of Input Device • Keyboard • Pointing Devices • Graphic and Video Input Devices • Audio Input Devices 2 Input Devices Input Devices • Any peripheral (piece of computer hardware equipment) used to provide data and control signals to a computer. • Allows the user to put data into the computer. • Without any input devices, a computer would only be a display device and not allow users to interact with it. 3 Input Devices Examples of Input Device • Keyboard • Mouse • Touchscreen • Graphic tablet • Microphone • Scanner 4 Input Devices Keyboard • One of the primary input devices used with a computer. • The keyboard looks very similar to the keyboards of electric typewriters, with some additional keys. • Keyboards allow a computer user to input letters, numbers, and other symbols into a computer • Uses an arrangement of buttons or keys. • Requires pressing and holding several keys simultaneously or in sequence. 5 Input Devices Keyboard 6 Input Devices Types of Keyboard • Standard • Laptop • Gaming and Multimedia • Thumb-sized • Virtual • Foldable 7 Input Devices Types of Keyboard Standard • Desktop computer keyboards, such as the 101-key US traditional keyboards or the 104-key Windows keyboards, include alphabetic characters, punctuation symbols, numbers and a variety of function keys. 8 Input Devices Types of Keyboard Laptop Keyboard • The laptop computer keyboard is a small version of the typical QWERTY keyboard. • A typical laptop has the same keyboard type as a normal keyboard, except for the fact that most laptop keyboards condense the symbols into fewer buttons to accommodate less space. -
Computer Information Technology
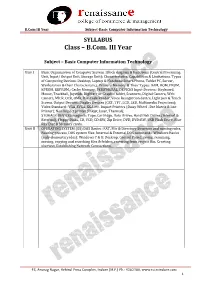
B.Com III Year Subject-Basic Computer Information Technology SYLLABUS Class – B.Com. III Year Subject – Basic Computer Information Technology Unit I Basic Organization of Computer System : Block diagram & Functions (Central Processing Unit, Input/ Output Unit, Storage Unit); Characteristics; Capabilities & Limitations. Types of Computing Devices: Desktop, Laptop & Notebook Smart-Phone, Tablet PC, Server, Workstation & their Characteristics. Primary Memory & Their Types: RAM, ROM, PROM, EPROM, EEPROM,; Cache Memory. PERIPHERAL. DEVICES Input Devices : Keyboard, Mouse, Trackball, Joystick, Digitizer or Graphic tablet, Scanners, Digital Camera, Web Camera, MICR, OCR, OMR, Bar-Code Reader, Voice Recognition device, Light pen & Touch Screen. Output Devices: Display Devices (CRT, TFT, LCD, LED, Multimedia Projectors); Video Standard : VGA, SVGA, XGA etc. Impact Printers (Daisy Wheel , Dot Matrix & line Printer); Non impact printer (Inkjet, laser, Thermal); STORAGE DEVICES magnetic Tape, Cartridge, Data Drives, Hard Disk Drives (Internal & External), Floppy Disks, CO, VCD, CD-RW, Zip Drive, DVD, DVD-RW, USB Flash Drive, Blue Ray Disc & Memory cards. Unit II OPERATING SYSTEM (OS) DOS Basics : FAT, File & Directory Structure and naming rules, Booting process, DOS system flies: Internal & External DOS commands. Windows Basics (only elementary ides): Windows 7 & 8: Desktop, Control Panel; saving, renaming, moving, copying and searching files & folders, restoring from recycle Bin. Creating shortcut, Establishing Network Connections. Unit III MS Word • Text Editing and formatting using Word 2007 & onwards versions: Creating documents using Template; Saving Word file in various file formats; Previewing documents, Printing document to file/page; Protecting document; Editing of selected text, Inserting, Deleting and Moving text. Formatting documents: page Layout, Paragraph format, Aligning text and Paragraph, borders and Shading, Headers and Footers. -
Io(Input-Output) Devices
Input / Output Devices RENETHA J.B. Input-Output Unit INPUT UNIT • Gets data and programs from various inputs devices and makes them available for processing to other units of the computer • The input data is provided through input devices such as – keyboard, mouse, trackball, and joystick . Also by scanning images, voice recording, video recording etc. • Irrespective of the kind of data, all input devices must translate the input data into a form understandable by the computer OUTPUT UNIT • Gets processed data from computer and sends to output devices to make the, available to the user • Eg. Display screen, printer, plotter, speaker INPUT DEVICES Human Data Entry Devices Source Data Entry Devices Keyboard Pointing Pick Devices Audio input Video input Devices Optical input Light pen Device Devices device Mouse Touch screen Scanner Trackball OCR Joystick MICR Digitizing Tablet OMR Barcode Reader Input Devices Human data entry devices • Are input devices that require data to be entered manually to the computer • The data may be entered by typing or keying in , or by pointing a device to a particular location. Source data entry devices • are used for audio input, video input and to enter the source document directly to the computer. • Source data entry devices do not require data to be typed -in, keyed-in or pointed to a particular location. Keyboard Features • Common input device, easy to use, used for entering text data , cursor moves with each typed character • QWERTY keyboard is most common Description • Has 5 sections: • Typing keys (1,2,3…A, B , C..) • Numeric keypad (on right side) • Function keys (F1,F2… on top) • Control keys (ctrl, alt etc.) • Special purpose keys (Enter, shift, spacebar) Working - Keyboard When a key is pressed, the keyboard interacts with a keyboard controller and keyboard buffer Keyboard controller stores the code of pressed key in keyboard buffer and inform the computer software that an action has happened on the keyboard . -
Fundamental of Computer.Pdf
FUNDAMENTAL OF COMPUTER Introduction to Computer Introduction – A Computer is an electronic device that manipulates information, or data. It has the ability to store, retrieve, and process data. You probably already know that you can use a computer to type documents, send email, play games, and browse the Web. You can also use it to edit or create spreadsheet, presentations, and even videos. Or Computer is an electronic device that takes raw data as input from the user and processes it under the control of set of instructions (called program), gives the result (output), and saves it for the future use. Charles Babbage is called the “Grand Father” of the computer. The First mechanical computer designed by Charles Babbage was called Analytical Engine. It uses read-only memory in the form of punch cards. What is Data? “Data is a Collection of Facts, Figures and numbers which is used to Input into computer for processing.” Data can be defined as a representation of facts, concept or instructions in a formalized manner which should be suitable for communication, interpretation, or processing by human or electronic machine. Data is represented with the help of characters like alphabets (A-Z, a-z), digits (0-9) or special characters (+,-,*,/,<,>,=,etc). What is Information? “After being processed data is known as information” Information is organized or classified data which has some meaningful values for the receiver. Information is the processed data on which decisions and actions are based. For the decisions to be meaningful, the processed data must qualify for the following characteristics: Timely – Information should be available when required. -

Input Devices
Student Notes Input Devices Input is any data or instructions entered into the memory of a computer. An input device is any hardware component that allows a user to enter data and instructions into a computer. The following is a list of the most common input devices which are nowadays found in a computer system. QWERTY Keyboard glossary pg. 129, 132 A keyboard contains keys that allow a user to enter data and instructions into the computer. All computer keyboards have a typing area that includes the letters of the alphabet, numbers, punctuation marks, and other basic keys. Many desktop computer keyboards also have a numeric keypad located on the right side of the keyboard. On notebook and many handheld computers, the keyboard is built into the top of the system unit. A standard computer keyboard is called a QWERTY keyboard because of the layout of its typing area which is similar to that of a typewriter. Advantages of using keyboards for data input include It is not necessary to buy additional equipment because most computer systems are normally supplied with keyboards. Entering data and instructions with keyboards is generally faster than with pointing devices. Disadvantages of using keyboards for data input include It takes a lot of time to practice in order to type quickly and accurately. Typing speeds are still very slow when compared with computer speeds. Mouse glossary pg. 130 A mouse is the most widely used pointing device with a GUI environment on personal computers. A mechanical mouse has a rubber ball on its underside to detect movement of the mouse. -

1.Introduction to Computer
I. INTRODUCTION TO COMPUTERS & WINDOWS I.1 DEFINITION OF COMPUTER A computer is an electronic device or a tool which accepts data1 or information2 in one form and processes it to produce data or information in another form i.e. in a more meaningful manner. It accepts data as its input, process data according to the predefined rules (programs3) and supplies results(output) in the form of data and/or actions. It can convert data into information that is useful to people. In other words a computer is a machine which collects, stores, retrieves, manipulates and transmits information. A complete computer system includes four distinct parts: Hardware Software Data User Hardware: •A computer's hardware consists of electronic devices; the parts you can see and touch. It consists of its processors, its storages, its input/output devices and its communication connections (i.e. the actual machinery: wires, transistors and circuits. ) •The term "device" refers to any piece of hardware used by the computer, such as a keyboard, monitor, modem, mouse, etc. 1 Data is a collection of basic facts (symbols that represent facts, objects, and ideas) e.g. name, age, salary etc. 2 Information is the data, which is processed into meaningful form 3 A program is a set of instructions which are written in a computer language to perform certain tasks. 1 Software: •Software – general term used to describe all the various programs – consists of organized sets of instructions for operating the computer system.•Some programs exist for the computer's use, to help it manage its own tasks and devices; These operations may include identifying, accessing and processing information.•Other programs exist for the user, and enable the computer to perform tasks for you, such as creating documents. -

Assignment Subject: - Computer Class: - VII Teacher: - Mrs
P a g e | 1 Assignment Subject: - Computer Class: - VII Teacher: - Mrs. Suudha Name: ______________ Class & Sec: _______________ Roll No. ______ Date: 04.04.2020 Lesson 1: More Peripherals A peripheral or peripheral device is device used to put information into and get information out of the computer. Three categories of peripheral devices exist based on their relationship with the computer: 1. an input device sends data or instructions to the computer, such as a mouse, keyboard, graphics tablet, image scanner, barcode reader, game controller, light pen, light gun, microphone, digital camera, webcam, dance pad, and read-only memory); 2. an output device provides output from the computer, such as a computer monitor, projector, printer, headphones and computer speaker); and 3. an input/output device performs both input and output functions, such as a computer data storage device (including a disk drive, USB flash drive, memory card and tape drive). Many modern electronic devices, such as internet capable digital watches, keyboards, and tablet computers, have interfaces that allow them to be used as computer peripheral devices. Peripheral Input or output What does it Do? Digital Camera Printer Scanner Monitor Mouse Keyboard Webcam 1. Display screen in which text is displayed in one color and background is displayed by another single color is called A. monochrome screen B. high resolution screen C. low resolution screen D. medium resolution screen 2. Teletypewriter terminal is an example of A. input devices B. output devices C. input/output devices D. storage devices P a g e | 2 3. Devices that accepts data from outside the computer and transfer into the CPU are called A. -

DRAFT: Human Factors Criteria for the Design and Acquisition of Non
Non-keyboard Interaction Devices Draft for review and comment Human Factors Criteria for the Design and Acquisition of Non-keyboard Interaction Devices: A Revision to Chapter 9 of the Human Factors Design Standard Vicki Ahlstrom, Human Factors Team-Atlantic City Bonnie Kudrick, Titan Corporation June 2004 Draft Final Report and Standard DOT/FAA/CTxx/xx This document is available to the public through the National Technical Information Service, Springfield, Virginia 22161 US Department Sponsored by of Transportation The Human Factors Group Federal Aviation Administration Washington, DC 20591 Non-keyboard Interaction Devices Draft for review and comment NOTICE This document is disseminated under the sponsorship of the U.S. Department of Transportation in the interest of information exchange. The United States Government assumes no liability for the contents or use thereof. The United States Government does not endorse products or manufacturers. Trade or manufacturer's names appear herein solely because they are considered essential to the objective of this report. This document does not constitute FAA certification policy. This report is available in Adobe Acrobat portable document format (.pdf) at the Federal Aviation Administration William J. Hughes Technical Center’s full-text technical reports web site: http://actlibrary.tc.faa.gov and at the Human Factors Team website: http://hf.tc.faa.gov/. Non-keyboard interaction devices Draft for review and comment Non-keyboard interaction devices Draft for review and comment Technical Report Documentation Page 1. Report No. 2. Government Accession No. 3. Recipient’s Catalog No. DOT/FAA/CTxx/xx 4. Title and Subtitle 5. Report Date June 2004 Human Factors Criteria for the Design and Acquisition of Non-keyboard Interaction Devices: A Revision to Chapter 9 of the Human Factors Design Standard 6.